
ファロ テクノロジーズ インコーポレーテッドにより出願された特許
1 - 10 / 60
有関節座標計測機再配置方法
【課題】隠れ点を計測できるという有関節CMMの便利さと、より広い空間を計測できるというレーザトラッカの利点とを併せ実現する有関節座標計測機再配置方法を提供する。
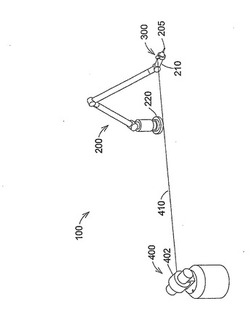
【解決手段】本システム100では有関節座標計測機(CMM)200及びレーザトラッカ400を使用し、そのCMM200上にはレーザトラッカ400と対をなすレトロリフレクタを配置する。共通の基準座標系による座標値にCMM200による計測値及びレーザトラッカ400による計測値を変換できるためCMM200を移動させることができる。更に、レーザトラッカ400では計測できない隠れ点を有関節CMM200等で計測することができる。
(もっと読む)
有関節座標計測機再配置方法、および有関節座標計測機用レトロリフレクタアセンブリ

【課題】隠れ点を計測できるという有関節CMMの便利さと、より広い空間を計測できるというレーザトラッカの利点とを併せ実現することを目的とする。
【解決手段】対象物の周囲での再配置を容易化する計測装置、システム及び方法を提供する。本システムでは有関節座標計測機(CMM)(200)及びレーザトラッカ(400)を使用し、そのCMM上にはレーザトラッカと対をなすレトロリフレクタ(310,312)を配置する。共通の基準座標系による座標値にCMMによる計測値及びレーザトラッカによる計測値を変換できるためCMMを移動させることができる。更に、レーザトラッカでは計測できない隠れ点を有関節CMM等で計測することができる。
(もっと読む)
光学エンコーダの利得とオフセットを動的に調整する方法
【課題】光学エンコーダの利得とオフセットを動的に調整する。
【解決手段】光学エンコーダにおける利得とオフセットを動的に調整する方法は、回折格子を含むエンコーダ・ディスクを提供する段階と、前記エンコーダ・ディスクに光を照射する段階と、前記回折格子から回折された光を検出しかつ第1の細カウント・チャネルを出力するように構成された検出器を提供する段階と、前記第1の細カウント・チャネルの第1のターゲット利得と第1のターゲット・オフセットを計算する段階と、前記第1のターゲット利得と第1のターゲット・オフセットに基づいて、前記第1の細カウント・チャネルからサンプリングされたデータに補正を適用する段階と、を含む。
(もっと読む)
座標測定システムに実行可能プログラムを提供する方法、システム、および記憶媒体
【課題】3次元座標測定システムのコントローラで使用するプログラムを顧客にネットワークを介して配信する方法を提供する。
【解決手段】顧客から実行可能プログラムの作成要求を受信するステップ100と、顧客のプログラム実行に係わる経験レベル等の情報を入力するステップとを具備する。作成される実行可能プログラムは3次元座標測定システムで実行される多数の測定ステップをオペレータに示すものである。実行可能プログラムはネットワークを介して顧客に配達される。
(もっと読む)
再帰反射器プローブアダプタ装置、レーザ追跡装置で点を測定する方法
再帰反射器バープローブ装置は、保持具と、前記保持具に配置された再帰反射器と、第1端部及び第2端部を有し、前記第1端部が前記保持具に取り付けられる部材と、前記部材の前記第2端部に取り付けられたエンドプレートとを含み、前記エンドプレートは、曲率半径がバーの長さと等しい円形外面を有する。  (もっと読む)
(もっと読む)
座標測定システムに実行可能プログラムを提供する方法、システム、および記憶媒体
【課題】3次元座標測定システムのコントローラで使用するプログラムを顧客にネットワークを介して配信する方法を提供する。
【解決手段】顧客から実行可能プログラムの作成要求を受信するステップと、顧客のプログラム実行に係わる経験レベル等の情報を入力するステップとを具備する。作成される実行可能プログラムは3次元座標測定システムで実行される多数の測定ステップをオペレータに示すものである。実行可能プログラムはネットワークを介して顧客に配達される。
(もっと読む)
座標測定システムに実行可能プログラムを提供する方法、システム、および記憶媒体
【課題】3次元座標測定システムのコントローラで使用するプログラムを顧客にネットワークを介して配信する方法を提供する。
【解決手段】顧客から実行可能プログラムの作成要求を受信するステップと、顧客のプログラム実行に係わる経験レベル等の情報を入力するステップとを具備する。作成される実行可能プログラムは3次元座標測定システムで実行される多数の測定ステップをオペレータに示すものである。実行可能プログラムはネットワークを介して顧客に配達される。
(もっと読む)
傾斜計を用いて関節アーム座標測定機の取り付けの安定性を評価するための方法
可搬型の関節アーム座標測定機が、基部と、反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能な関節アーム部であって、複数の接続されたアームセグメントを含む、アーム部と、トランスデューサからの位置信号を受信する電子回路と、基部に結合された第1の傾斜計であって、基部の傾斜の角度に応じた第1の電気信号を生成するように構成された、第1の傾斜計と、第1の傾斜計の第1の読み取り値および第1の傾斜計の第2の読み取り値を記録するように構成された電気的システムであって、第1の読み取り値が、基部に加えられた第1の力および取り付け構造に加えられた第3の力のうちの少なくとも1つに応じたものであり、第2の読み取り値が、基部に加えられた第2の力および取り付け構造に加えられた第4の力のうちの少なくとも1つに応じたものである、電気的システムとを含む。 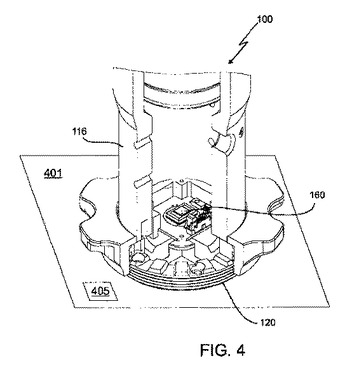 (もっと読む)
(もっと読む)
照明付きプローブ端を有する座標測定機および動作方法
可搬型の関節アーム座標測定機(AACMM)が、提供される。AACMM(100)は、反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能な関節アーム(104)を含む。アーム(104)は、複数の接続されたアームセグメント(106、108)を含み、アームセグメント(106、108)のそれぞれは、位置信号を生成するための少なくとも1つの位置トランスデューサを含む。測定デバイス(118)が、AACMM(100)の第1の端部に装着される。トランスデューサからの位置信号を受信するための、および測定デバイス(118)の位置に対応するデータを提供するための電子回路(210)が、設けられる。光源(402)が、アーム(104)に結合され、測定デバイス(118)の近くに光を放射するように配置される。 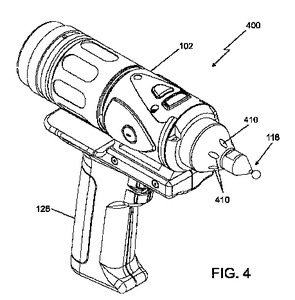 (もっと読む)
(もっと読む)
可搬型の関節アーム座標測定機の移動を改善するための傾斜計の使用
第1の位置から第2の位置に可搬型の関節アーム座標測定機(AACMM)を移動する方法において、AACMMは、第1の位置で第1の原点および第1の基準系を有し、第2の位置で第2の原点および第2の基準系を有する、方法であって、可搬型のAACMMが第1の位置および第2の位置のそれぞれにあるようにして、重力ベクトルに対して各方向がほぼ直交する2つの直交方向に沿った可搬型のAACMMの傾斜の量を測定するステップと、可搬型のAACMMが第1の位置にあるようにして第1の目標および第2の目標を測定して、第1の基準系においてx、y、およびz座標の第1の組ならびにx、y、およびz座標の第2の組を取得するステップと、可搬型のAACMMが第2の位置にあるようにして第1の目標および第2の目標を測定して、第2の基準系においてx、y、およびz座標の第3の組ならびにx、y、およびz座標の第4の組を取得するステップと、第1の基準系に対する第2の原点のx、y、およびz座標を発見するステップであって、第2の原点のx、y、およびz座標は、x、y、およびz座標の第1、第2、第3、および第4の組を使用するが、第1の位置および第2の位置でAACMMによって測定された第3の目標のさらなるx、y、およびz座標は使用せずに発見される、ステップとを含む方法。  (もっと読む)
(もっと読む)
1 - 10 / 60
[ Back to top ]