
学校法人千葉工業大学により出願された特許
1 - 10 / 101
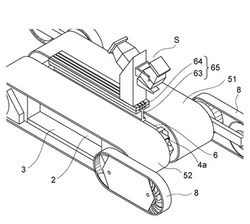
プラットフォームを備えた無人走行用の移動体
【課題】センサなどの安定した取付けができる基台を備えた原子力施設内を走行できる移動体を提供することを目的とする。
【解決手段】箱状の本体(A)と左右に設けられた走行用クローラ(D)を巻きかけるプーリ(B)が本体の前後に装着されており、プーリ(B)はセンターフレームと両側のサイドフレーム間に設けられた軸に軸支されており、センターフレームは機体の幅方向の中央部に存在しており、前後のセンターフレームにセンターベースバー(C)が連結し、センターベースバー(C)の上方に機器装着用のプラットフォーム(P)が装着されており、前記左右の走行用クローラ(D)はセンターフレームの幅の間隔を空けて機体の全巾に掛け回されている無人走行用の移動体。
(もっと読む)
無人走行体の遠隔操縦システム

【課題】往路走行モード選択時における遠隔操縦装置の操作感と、復路走行モード選択時における遠隔操縦装置の操作感とを共通化し、無人走行体の遠隔操縦性を高める。
【解決手段】手持ちコントローラ205,305に、無人走行体4,5の走行モードを往路走行モード又は復路走行モードに切り換える前後進切換スイッチ410,411と、無人走行体4,5の走行方向を指示するジョイスティック408を備える。無人走行体の走行モードを往路走行モードから復路走行モードに切り換えたとき、表示装置202,302の第1表示部211,311に表示される映像を、往路前方撮影カメラの撮影映像から復路前方撮影カメラの撮影映像へと切り換える。また、往路走行モードへの切換時と復路走行モードへの切換時とで、手持ちコントローラ205,305の操作内容に応じた無人走行体4,5の動作を同一に保つ。
(もっと読む)
無人走行用移動体
【課題】被災地の調査に適した無人走行用の移動体を開発する。
【解決手段】機体2と該機体2を覆う走行用クローラ5から構成される無人走行用の移動体であって、機体2は、内部に移動体制御用の中央収納部21を有し、機体2の下面はクローラベルト53の摺接面を形成し、機体2の前後にはプーリ7が設けられており、走行用クローラ5は、機体2の前後に設けたプーリ7間にクローラベルト53が掛け回され、電動モータ9を駆動源とする無人走行用の移動体。
(もっと読む)
無人走行体の遠隔操縦システム
【課題】2台の無人走行体を容易かつ安定に遠隔操縦することが可能な無人走行体の遠隔操縦システムを提供する。
【解決手段】第1の表示装置202を第2の表示装置302の左側に配列し、第1の表示装置202の駆動制御画面210中に表示される撮影カメラ85,86の撮影映像を、駆動制御画面210の右側辺に沿って設けられた表示部211に表示すると共に、第2の表示装置302の駆動制御画面310中に表示されるメインカメラ113の撮影映像を、駆動制御画面310の左側辺に沿って設けられた表示部311に表示する。
(もっと読む)
無人走行用移動体
【課題】被災地の調査に適した無人走行用の移動体を開発する。
【解決手段】機体2と該機体2を覆う走行用クローラ5から構成される無人走行用の移動体であって、機体2は、内部に移動体制御用の中央収納部21を有し、機体2の下面はクローラベルト53の摺接面を形成し、機体2の前後にはプーリ7が設けられており、走行用クローラ5は、機体2の前後に設けたプーリ7間にクローラベルト53が掛け回され、電動モータ9を駆動源とする無人走行用の移動体。
(もっと読む)
無人移動体運用システム
【課題】高濃度放射能空間などの人間が立ち入ることが困難で、曲がりくねった原子力施設内を踏査走行できる無人走行移動体の運用システムを提供する。
【解決手段】機体幅の大部分をクローラベルトで覆われた機体であって、機体中央部上面にセンサー類を設置した移動体であって、無線操縦タイプの先行走行移動体とこの先行走行移動体の後方から支援する有線操縦走行移動体とを組み合わせた原子力施設などの高濃度放射能環境下における無人移動体運用システム。
(もっと読む)
無人走行用移動体
【課題】被災地の調査に適した無人走行用の移動体を開発する。
【解決手段】機体2と該機体2を覆う走行用クローラ5から構成される無人走行用の移動体であって、機体2は、内部に移動体制御用の中央収納部21を有し、機体2の下面はクローラベルト53の摺接面を形成し、機体2の前後にはプーリ7が設けられており、走行用クローラ5は、機体2の前後に設けたプーリ7間にクローラベルト53が掛け回され、電動モータ9を駆動源とする無人走行用の移動体。
(もっと読む)
無人走行体を用いた環境情報の取得システム
【課題】粉塵、煙又は水蒸気が立ち込める劣悪な環境下においても、無人走行体の遠隔操縦を円滑に行うことができ、かつ構築物内の状況を明確に把握可能な無人走行体を用いた環境情報の取得システムを提供する。
【解決手段】遠隔操縦装置305を用いてオペレータにより遠隔操縦される無人走行体5に、走査式二次元測距装置105及び走査式三次元測距装置106を搭載する。走査式三次元測距装置106の検出データから作成される三次元画像を表示装置302に表示し、無人走行体5を遠隔操縦する際の参照データとして利用する。また、走査式二次元測距装置105の検出データをUSBメモリ306に順次記憶し、このUSBメモリ306に記憶された走査式二次元測距装置105の検出データを合成することにより作成される三次元画像を、構築物内の環境情報として利用する。
(もっと読む)
調査用の無人走行移動体
【課題】原子力施設内等の被災地の調査に適した無人走行用の移動体を開発する。
【解決手段】クローラDで覆われた本体Aの中央内部空間部分に走行用制御機器等を収納し、上部に調査用センサ機器などを装着して、走行制御機器類への保護および障害地の走行性および高濃度放射能環境下における調査能力を向上させた無人走行用の移動体Eであって、調査用センサをセンターベースバーCに設け、移動体Eは無線操縦および/又は有線操縦とした。
(もっと読む)
採水装置を備えた無人走行用の移動体
【課題】原子炉冷却水などの水をサンプリング採取する器具を備えた原子力施設内を走行できる移動体を提供することを目的とする。
【解決手段】横杆を取り付けた回転可能な支柱にサンプリング容器を取り付け、水中へ投入可能な位置を選択できる採水装置を備えた、全機幅に渡って駆動用クローラで被覆された無人走行用の移動体。
(もっと読む)
1 - 10 / 101
[ Back to top ]