
Fターム[2B034BB01]の内容
Fターム[2B034BB01]に分類される特許
101 - 120 / 477
畦形成機
【課題】様々な高さの畦の上面を形成するための畦形成機の取り扱いを簡易にする。
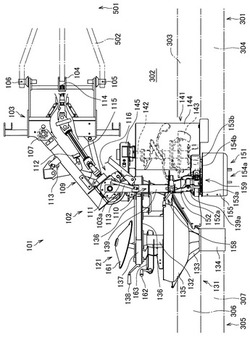
【解決手段】畦形成機101は、機枠102と、畦上面削土装置151とを備えて新畦305を形成する装置である。畦上面削土装置151は、機枠102に設けられ畦301の上面304を削る。畦上面削土装置151に備わる第1フレーム153a及び第2フレーム153bは、機枠102に連結され、いずれも機枠102を構成する支軸139を中心に回動自在である。削土ロータは、第2フレーム153bの回動先端側に設けられる。機枠102と第1フレーム153aとは、これらに掛け渡される伸縮自在の調整ロッド158により位置調整がなされる。第1フレーム153aと第2フレーム153bとには、連結ロッド159が架け渡される。連結ロッド159に装着されたスプリングは、第1フレーム153aと第2フレーム153bとを離反させる。
(もっと読む)
苗移植機

【課題】
整地ロータを伸縮可能に構成し、苗の植付位置周辺を整地すると共に、整地ロータが泥土を押し上げて苗を埋めてしまうことのない苗移植機を提供する。
【解決手段】
走行車体21の後部に昇降リンク装置22を介して上下動する圃場に苗を植え付ける植付部33を設け、植付部33の下方で且つ苗植部材35の植付位置の前側の圃場面を整地する整地ロータ14を供える苗移植機において、整地ロータ14を、ロータ体1の外周縁部に所定長さの整地体2を複数配置したロータ羽根3をロータ軸4の左右方向に沿って複数装着し、ロータ羽根3のロータボス5の左右一側に凹ボス6を形成し、ロータボス5の左右他側に凸ボス7を形成し、ロータ羽根3の凹ボス6と隣接するロータ羽根3の凸ボス7とを嵌め合わせて構成した。
(もっと読む)
水田における雑草の発生防止用ロボット
【課題】稲作において農薬等を使用せずに栽培する場合の水田内の雑草の発生防止、除去に要する労力を如何にして軽減するか。
【解決手段】雑草の発生防止用攪拌機を装備した小型のエアーボートをコンピュータで制御し、障害物(稲)を避けて水田内を自由に、くまなく移動することによって、雑草の発生を防止する。障害物(稲)の認識には、CCDを使用した画像認識または、レーダーのような電波探知機を使用する。水田内をくまなく移動する為に、障害物(稲)の情報にジャイロセンサーからの位置情報を付加したデータをメモリー上にマップとして記録し、走行箇所、未走行箇所を判別する。作業時間の短縮には、複数のロボットを稼働させ、お互いが無線LANで情報を共有することにより、作業を分担する。
(もっと読む)
水田作業機
【課題】使用者が機体操縦部から機体後方下方側を覗き込む等の煩わしさの無い状態で整地装置の状態を確認することができ、操作性の向上を図ることが可能な水田作業機を提供する。
【解決手段】機体と水田作業装置との間に横方向に沿う軸芯周りで回転駆動される整地ロータ50を備えた整地装置が備えられ、この整地装置が、整地作業を行う作業状態と作業を行わない非作業状態とに切り換え自在に構成され、整地ロータ50の整地深さを表示する表示装置Fと、整地装置が作業状態であれば表示装置Fを整地ロータ50の整地深さを表示する表示状態に切り換え、整地装置が非作業状態であれば表示装置Fを整地ロータ50の整地深さを表示しない非表示状態に切り換える制御装置Hとが備えられている。
(もっと読む)
畦形成機
【課題】運転者がトラクタの運転席に座った状態のまま、作業部(盛土装置や畦形成装置)の上下位置状態を把握できるようにする。
【解決手段】畦形成機は、トラクタ501の後方に装着される。畦形成機は、作業部121を備える。作業部121は、畦301の傾斜面303やその裾部をなす地面302を掘削して畦301に土を盛り上げる盛土装置141と、盛り上げられた土を締固めて新畦305を形成する畦形成装置131と、を有する。盛土装置141及び畦形成装置131の少なくとも一方は、可動ケースに取り付けられて上下に変位自在である。変位量表示部171は、畦形成機101において上方に突出する第1要素及び第2要素が互いに摺動自在に係合して構成される。変位量表示部171は、作業部121を構成する盛土装置141や畦形成装置131の相対高さを示し、運転席502に着座した運転者503に視認される。
(もっと読む)
整地ロータ
【課題】半割り体よりなる整地ロータのロータ軸に対する取付けの位置決めが正確かつ容易に行え、併せて整地ロータを強固に組み立て、頑丈な整地ロータを得ること。
【解決手段】ロータ片40のロータ軸23への嵌合面42に突起43を設け、この突起をロータ軸の取付け凹部45に差し込み、2個一対のロータ片相互をロータ軸に位置決めする。突起と2個のロータ片相互を固定する螺子止め部46,47を両端の連結部材42に設け、螺子止め部に装着した締具により整地ロータ22を組み立てる。
(もっと読む)
乗用田植機における植え付け部の田面走行装置
【課題】田植機もコスト低減し,且つ能率UPが求められている、能率UPは速度UPである、速度UPは大幅なコストUPにはならない、速度UPすると現在の田植機のフロート構造では田面表層の水と泥がフロート前方に山となる、そのために既植えた苗に水と泥を被る事になり、浮き苗が出来たり、隣条が田植えが出来なくなる。
1,6m/sまでは比較的影響は少ないが、2,2m/s位の高速化するとフロート方式では植え付け不能となる。更に回行時に毎回植え付け部UPが必要、これは時間のロスと運転の困難さを増している。
【解決手段】現状は植え付け部の下部にフロートを設ける構造、この方式をクローラーとならしローターで受ける構造にして、2つの機能を進行方向と同方向に回転させて同下部に水と泥を掻き込み、更に鍬込む構造にする。
(もっと読む)
整地ロータ構成体及び整地ロータ
【課題】組み付けが容易で、材料も削減できる整地ロータ構成体を提供することにある。
【解決手段】偶数多角形の取付け孔105を形成したボス部101、リム部102、リム部102の一方の面102aに周方向等間隔に設けられた整地作用部103、リム部102の他方の面102aに周方向等間隔に設けられて整地作用部103の間に設けられた支持部104を備えて、整地ロータ構成体100を構成する。取付け孔105の断面をN角形とし、整地作用部103及び支持部104の個数をHとしたとき、H=N(2n+1)/2(但し、Nは偶数で、n=1,2,3・・・とする)となるように構成する。
(もっと読む)
畦形成機
【課題】オフセット機構部のユニバーサルジョイントの折れ角度を大きくせずに十分なオフセット量が確保できて作業バランスが良好な畦形成機を提供する。
【解決手段】作業部30の水平回動軸22と直交して前方側に突設させた中間入力軸を有した駆動ケースを支持フレーム21側方に固着して設け、装着部11の左右中央部に位置する入力軸15と駆動ケースの中間入力軸間をユニバーサルジョイント71で連結し、平面視において支持フレーム21の装着部11側の水平回動軸22は、入力軸15中心より左右方向に偏位しているとともに、ユニバーサルジョイント71の入力軸15側の屈折ヨーク711位置より後方側に偏位した位置に配置されている畦形成機による。
(もっと読む)
乗用田植機
【課題】 本発明の課題は、圃場に適した整地作業をできるようにすることである。
【解決手段】 走行車体の後側に昇降用リンク装置を介して苗植付装置を連結し、苗植付装置から前方に突出するアームを介して左右方向の均平ロータリ軸回りに回転して対地作業を行う均平ロータリを走行車体の後方に設けた乗用田植機において、苗植付装置に設けたセンターフロートの上下動を検出する上下動検出機構を設け、均平ロータリを上下調節する均平装置上下調節モータを設け、上下動検出機構の検出に基づいて均平装置上下調節モータの作動目標値を補正すると共に、均平装置上下調節モータへ出力して均平ロータリを昇降制御する制御部を設けた。
(もっと読む)
苗移植機
【課題】整地ロータを備える苗移植機において、圃場端における機体旋回に伴う圃場面の荒れを効果的に整地することにより、圃場端植付けを含む苗植付作業の能率を確保することができる苗移植機を提供する。
【解決手段】苗移植機は、伝動部(18)を介して走行動力を受ける圃場走行用の走行部(11)を備える支持機体(2)と、その後部に昇降可能に設けられて苗株の植付けを行う苗植付部(4)と、この苗植付部(4)の直前位置で植付け全幅について回転動作によって圃場面を整地する整地ロータ(27a,27b)とを備えて構成され、上記整地ロータ(27a,27b)は、前側に位置する支持機体(2)側に支持可能に伝動部(18)から変速動力を伝達する伝動支持部(72)を備えたものである。
(もっと読む)
農作業機
【課題】適切な耕耘整地作業ができる農作業機を提供する。
【解決手段】農作業機1は、耕耘作業をする耕耘体11と、この耕耘体11の上方部を覆うカバー体16とを備える。農作業機1は、耕耘体11の後方で整地作業をする整地体21と、耕耘体11の前方で砕土作業をする砕土体31とを備える。砕土体31は、カバー体16の前端部に取り付ける。砕土体31は、耕耘体11の前方で砕土作業をする砕土棒状部43を有する。
(もっと読む)
農作業機
【課題】耕耘体の耕耘深さを容易に目視確認できる農作業機を提供する。
【解決手段】農作業機1は、トラクタTに連結する機体2を備える。機体2には、耕耘作業をする耕耘体11を設ける。機体2には、耕耘体11の上方部を覆うカバー体16を設ける。カバー体16の後端部には、耕耘体11の後方で整地作業をする整地体21を設ける。カバー体16の前端部には、トラクタTに乗った作業者が耕耘体11の耕耘深さAを目視確認するための目印手段31を設ける。目印手段31は、左右方向に並んで位置しそれぞれの下端が異なる高さに位置する複数の目印部36を有する。
(もっと読む)
畦形成機
【課題】盛土部の掘削ローターで削土された土壌を旧畦上にできるだけ効率よく十分に盛り上げることができる畦塗り機を提供する。
【解決手段】盛土部41は、略水平方向の回転軸に複数の掘削刃43を放射状に備えた掘削ローター部45と、掘削ローター部45を覆うカバー体44とを備え、カバー体44の掘削ローター部45の後方に位置するカバー面441は平面視において畦と直行する面より畦側が後側に傾斜していて、これにより掘削ローター部45で掘削された土壌が効率よく畦側に移動される。また、カバー体44の畦側端部には、平面視カバー端部を回動支点として畦側を回動可能に設けたガイドプレート46を設けてあり、土壌条件が異なる場合でも対応できる。
(もっと読む)
農作業機
【課題】第2整地体の側板が畦に当たって畦が崩れてしまうことを防止できる農作業機を提供する。
【解決手段】農作業機10は、第1整地体23と、この第1整地体23に上下方向に回動可能に設けた第2整地体24とを備える。第2整地体24は、左右方向長手状の整地本体板41と、この整地本体板41の左右方向両端部に立設した折曲板状の側板40とを有する。この側板40の後端部が、側板40の前端部よりも内側方に位置する。
(もっと読む)
水田作業機
【課題】整地装置の泥滞留に起因した整地装置による泥水の押し出しを効果的に抑制することができる水田作業機を提供する。
【解決手段】整地装置40を整地作用する整地作用状態と整地装置40における泥滞留の解消を図る泥滞留解消状態とに切り換え操作する切り換え手段97,98と、整地装置40における泥滞留の発生を検出する泥滞留検出手段92,93とを設けてある。泥滞留検出手段92,93が検出作動すると、整地装置40が泥滞留解消状態に切り換え操作されるように泥滞留検出手段92,93による検出情報を基に切り換え手段97,98を自動的に操作する制御手段96を設けてある。
(もっと読む)
畦形成機
【課題】畦上面削土装置の不必要時における畦上面削土装置の適切な収納を実現する。
【解決手段】畦形成機には、旧畦表面に土を盛り上げる盛土装置41、および盛土装置41により盛り上げられた盛土を締め固めて新畦を形成する畦形成装置31、および作業状態では畦上面側に展開され、非作業状態では盛土装置41の上方に折畳まれる畦上面削土装置51とを設ける。折畳み部にはクラッチが設けられ、非作業時には、クラッチを切断して駆動を停止する。
(もっと読む)
畦形成機
【課題】畦形成装置に設けられている円筒部をディスクから簡易かつ迅速に着脱できるようにし、様々な畦高が混在する農地での新畦を形成する作業の効率化を実現する。
【解決手段】畦形成機は、旧畦に土を盛り上げる盛土装置と、盛り上げられた盛土を締め固める畦形成装置と、を備える。畦形成装置は、盛土の斜面を締め固めるディスク33と、盛土の上面を締め固める円筒部とを備える。円筒部は、シャフト341を保持する。シャフト341は、円筒部の軸心方向に平行にそれ自体の長手方向が向き、軸回り方向に回転自在かつ長手方向に移動自在にとなっている。円筒部の端部から突出する嵌合ピン344がディスク33に設けられた第1嵌合孔333に嵌合した状態でカムレバー347を操作すると、シャフト341は長手方向移動及び軸回り回転し、ディスク33と円筒部との着脱がロックされる。
(もっと読む)
農作業機の無線操作システム
【課題】トラクタに装着して農作業を行う作業機が有する出力機器を携帯電話により操作可能な農作業機の無線操作システムを提供することを目的とする。
【解決手段】トラクタに装着して農作業を行う作業機3と、携帯電話2とを備え、作業機3は、作業機3のための出力機器40と、携帯電話2からの無線操作信号を受信する受信部11と、受信した操作信号に基づき出力機器40を制御する制御部12とを有し、携帯電話2は、携帯電話2が有するボタン30により出力機器40の操作が可能であり、ボタン30による操作方法は、作業機3の機種に合わせて変更可能であることにより上記課題を解決する。
(もっと読む)
水田除草ロボット
【課題】条間、株間を自由に移動し、且つ、安定した除草効果が得られる除草ロボットを提供する。
【解決手段】水田除草ロボット1は、水田の稲株が通過可能な逆凹状の空間を有したメインフレーム10は、その下部に、車輪19A,19B、車輪19A,19Bを回転駆動する駆動部11A,11B、車輪19A,19Bの前後に配置されて水田除草ロボット1に浮力を生じさせる第1のフロート20A〜20D、全部に設けられて水田内の稲株を検知するセンサレバー23A,23B、メインフレーム10に搭載されたセンサ類に基づいて駆動部11A,11Bを駆動し、車輪19A,19Bの回転を制御する。これにより、水田除草ロボット1は稲株を避けながら自律走行する。
(もっと読む)
101 - 120 / 477
[ Back to top ]