
Fターム[2B034BC03]の内容
Fターム[2B034BC03]の下位に属するFターム
Fターム[2B034BC03]に分類される特許
1 - 15 / 15
除草用ブラシローラ及び水田除草方法
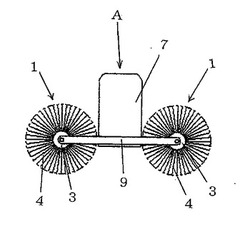
【課題】本発明は、フロートを必要とせず、稲株を傷めず、かつ稲列に沿って走行させる/走行する必要がない除草用ブラシローラ及び水田除草方法を提供する。
【解決手段】自律走行ロボットAの直進走行中は、走行方向の前後の除草用ブラシローラ1のローラ回転速度に差を設け、走行予定速度に対して一方(前部又は後部)の除草用ブラシローラ1を早く、かつ他方(後部又は前部)の除草用ブラシローラ1を遅く回転させることによって、柔軟構造の支持棒4の先端と田圃面にスリップを生じさせ、田圃面の撹拌をより強力に行うことができる。前記除草用ブラシローラ1は、駆動軸2に軸支された回転ドラム3を設け、該回転ドラム3の円周外面に放射状に多数の柔軟構造の支持棒4を突設させることによって形成される。
(もっと読む)
水田除草ロボット

【課題】本発明は、水田の稲列の末端で稲列を踏み潰さずにUターン反転することができる、水田の稲列を認識して自走する小型の水田除草ロボットを提供する。
【解決手段】本発明の水田除草ロボットは、2つの矩形の第一台座1及び第二台座2を突き合わせて枢支し、互いに起伏回転可能に連結した台座ユニット3と、前記第一台座1下面に設けた垂直軸(図示省略)に水平回転可能に連結された第一ターンテーブル4と、前記第二台座2下面に設けた垂直軸(図示省略)に水平回転可能に連結された第二ターンテーブル5と、前記第一ターンテーブル4に固定され、クローラ6を備えた第一走行ユニット7と、前記第二ターンテーブル5に固定され、クローラ6を備えた第二走行ユニット8と、前記台座ユニット3上に載置され、図示しないエンジン発電機、制御基板、カメラ、電源装置を内蔵した制御ユニット9とから構成されている。
(もっと読む)
固定ピン及びこれを用いた構造物
【課題】着脱部品及び保持体の固定用の貫通孔に挿入して抜けない状態に保つことで着脱部品を保持体に固定する固定ピンとして、使用中に周辺存在物に引っ掛かって貫通孔から引き抜かれてしまうおそれがなく着脱部品の安定した固定ができる固定ピン等を提供する。
【解決手段】固定ピンは、一方端に軸が取り付けられた棒状の形状の本体ピンと一方端に軸が挿し入れられる軸入れ孔が形成されて本体ピンに対し揺動自在に連結された抜け止めピンとを組み合わせており、その軸入れ孔が、抜け止めピンを本体ピンと一直線状に連結した状態になる位置まで揺動させることを可能にする第一孔部と、第一孔部の抜け止めピンの他方側となる位置に配置されて抜け止めピンを本体ピンと一直線状に連結した状態になる位置まで揺動させることを不能にする第二孔部等で構成され、使用時に軸入れ孔の第二孔部に軸を存在させたうえで抜け止めピンを本体ピンと交差した状態に保持する。
(もっと読む)
繁殖抑制機構
【課題】 圃場走行装置の走行手段が直接作用しない農作物列の株間又は/及び株際における農作物生育阻害対象の繁殖を抑制することができるようにする。
【解決手段】 本発明の繁殖抑制機構10は、圃場に植設された農作物列を跨ぐ門型に形成された機体フレーム2と、該機体フレーム2の両側部に設けられた一対のクローラ3とを備えた圃場走行装置1に装備され、農作物Cの列の株間又は/及び株際における農作物生育阻害対象の繁殖を抑制するように構成されている。そして、各クローラ3の機体内側に配設された支持手段32と、基端側が該支持手段32に支持されるとともに、先端側が機体内側部における農作物Cの列の株元通過位置へ延設され、農作物Cの列の株間又は/及び株際における圃場表面を摩撫するように構成された摩撫手段33とを備えている。
(もっと読む)
水田用移動型除草機
【課題】
水田用除草機において、水田内を自由に動き回ることができるようにする。また、作業時の稲苗の損傷を少なくする。
【解決手段】
上記目的を達成するために、防水性のある本体ケース7にモーター1、電源装置2が収められ、モーター1の軸の先端には除草刃4を備える除草機を提案する。除草機本体は水面に浮きながら、本体ケース7より下方に突き出た除草刃4により雑草を切断するものである。また、電力調整装置6で除草刃4の回転を調整し、推進力の強弱や方向を制御することにより、水田内を定まった方向なく適当に動き回ることができる。
(もっと読む)
畦塗り機
【課題】一定の耕耘性能を保つことができ、所望の盛土量を得ることができる畦塗り機を提供する。
【解決手段】畦塗り機1は、土を耕耘して盛り上げる盛土体3と、盛土体3を支持する盛土体支持フレーム21とを備える。畦塗り機1は、盛土体3の後方で盛土を締め固めて畦を形成する畦形成体4と、畦形成体4を支持する畦形成体支持フレーム22とを備える。畦形成体支持フレーム22に対して盛土体支持フレーム21を上下平行移動させることにより、盛土体3の作業姿勢を一定に維持したまま盛土体3の耕耘深さを調整可能な調整手段76を設ける。
(もっと読む)
畦塗り機
【課題】大きな上下振動が発生せず、崩れにくい強固な畦を形成できる畦塗り機を提供する。
【解決手段】畦塗り機1は、盛土体と、この盛土体の後方に位置する畦形成体4とを備える。畦形成体4は、回転中心軸線Xを中心として回転しながら盛土を締め固めて畦側面を形成する畦側面形成体24を備える。畦形成体4は、回転中心軸線Xを中心として回転しながら盛土を締め固めて畦上面を形成する畦上面形成体25を備える。畦側面形成体24は複数の側面形成板部32を有し、互いに隣り合う側面形成板部32間には側面側段差部34がある。畦上面形成体25は複数の上面形成板部42を有し、互いに隣り合う上面形成板部42間には上面側段差部44がある。側面側段差部34の位置と上面側段差部44の位置とが回転方向aに関してずれている。
(もっと読む)
畦塗り機
【課題】カバー体を機体の支持フレーム部から取り外すことができる畦塗り機を提供する。
【解決手段】畦塗り機1は機体2を備え、この機体2は下方に向って開口する略コ字状の支持フレーム部13を有する。畦塗り機1は盛土体3を備え、この盛土体3は、支持フレーム部13で軸方向両端部を回転可能に支持した回転軸および土を耕耘して盛り上げる複数の耕耘爪を有する。支持フレーム部13には、耕耘爪を覆うカバー体51を脱着可能に取り付ける。
(もっと読む)
除草機
【課題】芝等の中にまぎれている雑草を回転ドラムに装着したクリップで雑草を引き抜き除草、刈り取る除草機を提供する。
【解決手段】 回転ドラム5に装着してあるクリップ6の開閉運動により雑草等を引き抜き除草刈り込みができ、クリップ6の構造機能を変えることにより仕事の多様化もはかれるよう構成してあることを特徴とする。
(もっと読む)
土除去装置およびスクレーパ
【課題】ディスクに付着した土が大きな土塊となって落下することを防止する。
【解決手段】土除去装置56は、圃場の土の移動を行うディスクに付着した土を掻き落とす装置である。土除去装置56は、第1掻き取り刃162aを有する第1スクレーパ162と、第2掻き取り刃164aを有する第2スクレーパ164とが、第3中耕ディスク16の径方向に並設されている。そして、第1掻き取り刃162aの第2スクレーパ164に近接する先端部162dが、第2掻き取り刃164aの第1スクレーパ162に近接する先端部164cとディスク回転軸186とを通る直線上に位置しないように構成されている。
(もっと読む)
湿田用被牽引装置
【課題】牽引されて蓮根田を滑走する田舟では、茎等の障害物が先端に堆積して滑走困難となり、また運搬のため大きさが制限され、安定性が充分でない。
【解決手段】複数のフロート61〜64をフレーム部材22,23で一体に連結したフレーム集合体5に肥料散布装置16を搭載する。外側のフロート61,64は、固定ピン46によりフレーム部材23の取付位置が変更されて、間隔L2が調節される。各フロートの先端に突尖状のガイド部材25が設けられる。
(もっと読む)
慣行培土と早期培土の共用培土装置
【課題】部品の着脱により、畝頂部を滑らかに形成する早期培土と作物に干渉しない慣行培土に共用可能な培土装置を提供する。
【解決手段】トラクタ等に牽引される左右各対の培土器ユニットが、隣り合う培土翼板の相対する後端間に、出芽作物の慣行培土を可能にする所定の間隙を有するとともに、前記各対の培土器ユニットの相対する後端部に着脱自在に取付けられ、相対する後端から横方向に向き合って張り出して畝中央頂部を円滑面に押圧する早期培土補助翼板を具備する。補助翼板は、好ましくは、培土翼板と補助翼板の相互の長孔の結合位置により、畝頂部培土プレートの上下、前後位置及び角度を可変にする。さらに好ましくは、横方向に張り出すプレートを回動させて、張り出し巾を可変にする。
(もっと読む)
除草ロボット
【課題】簡易且つ経済的に水田雑草の防除を可能とする、除草用の自走ロボットを提供する。
【解決手段】ボディと、ボディの左右に設けられた駆動装置と、ボディの前方中央及び左右に設けられたセンサーと、水田表層土の撹拌装置とを備え、障害物を避けて走行し、表層土を撹拌することを特徴とする水田除草ロボットであり、前記撹拌装置は、クランクの揺動により上下前後に振動する撹拌ブレードからなる撹拌装置、回転軸に取り付けられた回転する撹拌ブレードからなる撹拌装置、又は回転軸に取り付けられた回転する弾性を有する撹拌ブレードと反発発生固定棒とからなる撹拌装置のいずれか一つ以上を用いることが好ましい。
(もっと読む)
農業管理ロボット
【課題】田植え初期から適切に繰り返し遠隔操作や自動運転で、除草作業が出来る農業管理ロボット。
【解決手段】機体は、機体中央部の駆動用エンジン12を具備した構造で、車軸10と車輪9は着脱可能な除草をかねた前後左右車輪18、24,25,26で構成され、機体に搭載された駆動用エンジン12の出力を駆動用車軸10に出力供給し、前後車輪を回転する。機体側面と前後部に具備されている接触圧センサー18により稲株位置を感知し、エンジン12の車軸10への出力供給を、機体上部に搭載されているコンピュウタ19で車輪の、正転、逆転、停止、回転数変換を制御して、条間に沿って自動走行しながら土壌撹拌と除草作業をする。またスイッチの切り替えにより人が農業管理ロボットに具備されているカメラ7の映像を、遠隔操縦装置で映像を確認しながら遠隔操作ができる構成である。
(もっと読む)
土壌通気装置
【課題】土壌通気装置を提供する。
【解決手段】この土壌通気装置(10)は、この装置(10)のサイズおよび重量を減少させる比較的コンパクトなギアシステム(60)により操作される土壌通気用歯(50)を含む。更に、この土壌通気装置(10)は中心に配置される支持シャフトなしに操作することができ、それにより歯保持シャフト(30,40)を互いに近づけて配置させ、装置(10)のサイズを減少させることを可能にする。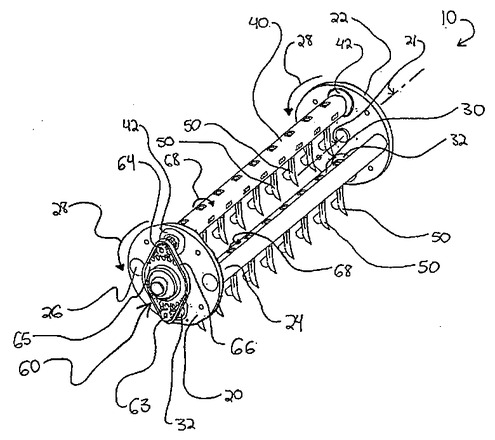
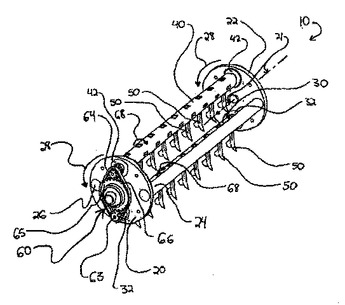 (もっと読む)
(もっと読む)
1 - 15 / 15
[ Back to top ]