
Fターム[2B034BG01]の内容
土作業機(その他) (8,058) | 制御装置又は報知装置 (134) | 検出 (27)
Fターム[2B034BG01]に分類される特許
1 - 20 / 27
農作業機
【課題】作業者の負担を軽減できる農作業機を提供する。
【解決手段】農作業機1は、トラクタの後部に連結する機体2を備える。機体2には、耕耘体を回転可能に設ける。機体2には、整地体4を上下方向に回動可能に設ける。農作業機1は、整地体4の状態を表示する状態表示手段80を備える。
(もっと読む)
代かき作業機の耕深表示装置

【課題】代かき作業時に耕深を一定にすることができる耕深表示装置を提供する。
【解決手段】耕深表示装置40は、機体5に回転自在に支持された耕耘ロータ13の上部を覆うシールドカバー13と、この後部に上下方向に回動自在に配設されて耕耘ロータ13により耕耘された耕土を整地する第1整地板11と、この後部に上下方向に回動自在に配設されて耕土表面を均平にする第2整地板12とを備える代かき作業機1に設けられる。耕深表示装置40は、一端側が機体5に回動自在に接続されて他端側が第2整地板12に回動自在に接続され、耕耘ロータ13により耕耘された耕土の耕深に応じた第1整地板11に対する第2整地板12の回動に伴って上下方向に回動自在な揺動アーム42と、揺動アーム42の回動に応じて耕深を表示する耕深表示部50とを有してなる。
(もっと読む)
畦塗り機
【課題】トラクタに装着する畦塗り機で遠隔操作により少なくとも畦形成部の回転を変更することができる畦塗り機を提供することを目的とする。
【解決手段】トラクタ200に装着して畦塗り作業を行う畦塗り機において、耕耘軸61aを回転させて圃場の土を盛り上げる耕耘部61と、前記耕耘部の進行方向後方で回転しながら盛り土を締め固めて新畦を形成する畦形成体62と、遠隔操作可能な操作部81と、操作部81の操作信号を受信し畦形成体62の回転を制御する制御部41とを有し、操作部81の操作により、畦形成体62の回転を耕耘部61との回転とは独立して変更可能とする。
(もっと読む)
農作業機
【課題】シリンダにより作動する作動部の安全性を考慮したトラクタに装着して農作業を行う農作業機を提供することを目的とする。
【解決手段】トラクタに装着して農作業を行う農作業機において、シリンダ16の伸縮により一方の定位置と他方の定位置を移動する作動部と、シリンダ16を制御する制御部10と、負荷検出手段20とを有し、制御部10は、シリンダ16の作動中に負荷検出手段20から得られる負荷関連情報からシリンダ16に一定以上の負荷がかかったと判断した場合にシリンダ16を逆方向に作動させる。
(もっと読む)
水田における雑草の発生防止用ロボット
【課題】稲作において農薬等を使用せずに栽培する場合の水田内の雑草の発生防止、除去に要する労力を如何にして軽減するか。
【解決手段】雑草の発生防止用攪拌機を装備した小型のエアーボートをコンピュータで制御し、障害物(稲)を避けて水田内を自由に、くまなく移動することによって、雑草の発生を防止する。障害物(稲)の認識には、CCDを使用した画像認識または、レーダーのような電波探知機を使用する。水田内をくまなく移動する為に、障害物(稲)の情報にジャイロセンサーからの位置情報を付加したデータをメモリー上にマップとして記録し、走行箇所、未走行箇所を判別する。作業時間の短縮には、複数のロボットを稼働させ、お互いが無線LANで情報を共有することにより、作業を分担する。
(もっと読む)
畦形成機
【課題】運転者がトラクタの運転席に座った状態のまま、作業部(盛土装置や畦形成装置)の上下位置状態を把握できるようにする。
【解決手段】畦形成機は、トラクタ501の後方に装着される。畦形成機は、作業部121を備える。作業部121は、畦301の傾斜面303やその裾部をなす地面302を掘削して畦301に土を盛り上げる盛土装置141と、盛り上げられた土を締固めて新畦305を形成する畦形成装置131と、を有する。盛土装置141及び畦形成装置131の少なくとも一方は、可動ケースに取り付けられて上下に変位自在である。変位量表示部171は、畦形成機101において上方に突出する第1要素及び第2要素が互いに摺動自在に係合して構成される。変位量表示部171は、作業部121を構成する盛土装置141や畦形成装置131の相対高さを示し、運転席502に着座した運転者503に視認される。
(もっと読む)
水田作業機
【課題】使用者が機体操縦部から機体後方下方側を覗き込む等の煩わしさの無い状態で整地装置の状態を確認することができ、操作性の向上を図ることが可能な水田作業機を提供する。
【解決手段】機体と水田作業装置との間に横方向に沿う軸芯周りで回転駆動される整地ロータ50を備えた整地装置が備えられ、この整地装置が、整地作業を行う作業状態と作業を行わない非作業状態とに切り換え自在に構成され、整地ロータ50の整地深さを表示する表示装置Fと、整地装置が作業状態であれば表示装置Fを整地ロータ50の整地深さを表示する表示状態に切り換え、整地装置が非作業状態であれば表示装置Fを整地ロータ50の整地深さを表示しない非表示状態に切り換える制御装置Hとが備えられている。
(もっと読む)
水田除草ロボット
【課題】条間、株間を自由に移動し、且つ、安定した除草効果が得られる除草ロボットを提供する。
【解決手段】水田除草ロボット1は、水田の稲株が通過可能な逆凹状の空間を有したメインフレーム10は、その下部に、車輪19A,19B、車輪19A,19Bを回転駆動する駆動部11A,11B、車輪19A,19Bの前後に配置されて水田除草ロボット1に浮力を生じさせる第1のフロート20A〜20D、全部に設けられて水田内の稲株を検知するセンサレバー23A,23B、メインフレーム10に搭載されたセンサ類に基づいて駆動部11A,11Bを駆動し、車輪19A,19Bの回転を制御する。これにより、水田除草ロボット1は稲株を避けながら自律走行する。
(もっと読む)
農作業機
【課題】走行車に乗った作業者が走行車に乗ったまま作業機本体の前後傾斜状態を容易に確認できる農作業機を提供する。
【解決手段】農作業機1は、トラクタに連結する作業機本体10を備える。作業機本体10は、トラクタの走行により移動しながら畦塗り作業をする。作業機本体10の機体21のマスト部32には、表示手段51を取り付ける。表示手段51は、トラクタに乗った作業者が目視可能な位置に位置し、トラクタに乗った作業者に対して作業機本体10の前後傾斜状態を表示する表示体65を有する。
(もっと読む)
オフセット作業機及び制御方法
【課題】走行機体の進行に沿ったオフセット位置で圃場隅部までの連続的な前進作業を可能にする。
【解決手段】オフセット位置で作業可能な作業部120と、この方向と位置の基準値を設定する記憶部と、方向及び位置を検出する角度センサ150及び位置センサ151と、方向及び位置を調整する方向シリンダ141及びオフセットシリンダ140と、これらシリンダを制御する制御手段160を備え、制御手段160は、作業部の位置と方向を所定状態に維持して作業する通常作業モード、予め設定された作業部の方向と位置を基準値とし、走行機体の走行方向の変化に伴う作業部の位置と方向の変化を調整して直線状作業を維持する自動直進作業制御モード、このモード終了時の位置を起点とし、隅部に残存する未作業部分を直線状又は円弧状に作業する自動隅部作業制御モードを有し、自動隅部作業制御モードでは段階的に変化する間歇動作による制御をすること。
(もっと読む)
畦成形機
【課題】水田等の圃場の作業残隅部の畦成形作業を走行機を後進させて行うような熟練を要する作業機ではなく、制御装置や制御プログラムが簡易で操作が簡単であるとともに、全体の製造コストを低くできる畦成形機の提供。
【解決手段】走行機が畦から離れる方向に旋回走行しながら直線状の連続した畦を成形する非平行走行畦成形作業が行える制御部を有し、非平行走行畦成形作業時は、畦成形作業部4に畦成形作業部4の進行方向の変位量を検知する検知手段6が設けられていて、変位量に基づき第2水平回動手段を作動させて畦成形作業部4の進行方向を一定方向とする制御を行うとともに、第1水平回動手段はフリー状態と固定状態を交互に予め設定した実行時間で繰り返し行う制御のみにより制御されて畦成形作業を行う畦成形機による。
(もっと読む)
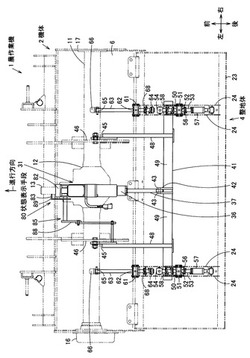
農作業機
【課題】トラクタからの回転動力を伝達する伝動部の途中に有する動力伝達部で回転差が生じているか否かを検出するトラクタに装着する農作業機を提供することを目的とする。
【解決手段】トラクタからの回転動力を入力し入力した回転動力を伝動部で伝動させて作業部で出力して農作業を行うトラクタに装着する農作業機において、伝動部に一定条件下での動力を伝達する動力伝達部10を介在し、動力伝達部10より入力側の伝動部の回転を検知する第1の検知部4と、動力伝達部10より出力側の伝動部の回転を検知する第2の検知部5と、2つの検知部4、5からの情報を取得し動力伝達部10で回転差が生じているか否かを検出する制御部2とを有することで上記課題を解決する。
(もっと読む)
苗移植機
【課題】圃場が荒れやすい枕地あるいは枕地近くにおいて適正に整地が行え、苗の植付精度が良くなる対地作業装置付きの苗移植機を提供すること。
【解決手段】車体2の後部に昇降自在に設けた複数条分の苗植付具52aを有する苗植付部4に対して昇降自在に設けた地面を整地するロータ27a,bと該ロータの回転軸と同軸上に設けたカバー37を有し、ハンドルの旋回開始時からの走行距離を車輪(旋回内側に後輪)の回転数センサ7で検出した回転数に基づき測定し、走行距離が所定値に達すると自動的に苗植付部4による圃場への苗植付けを開始する自動植付開始モードを設定し、該モード作動中にはロータ27a,bを接地させないようにロータカバー37の後方部37bを苗植付装置4に固定支持された上方部37aの後端部を支点として回動させて後方部37bの後端部を圃場に接地させて、該後端部で苗植付部4を浮かせて圃場の凹凸を均平化させる。
(もっと読む)
オフセット作業機
【課題】トラクタに装着されトラクタを旋回後トラクタを停止させたまま作業部を直進させて作業を行う場合に作業者の意図をより正確に実現し、安全に作業を行うことができる機能を有するオフセット作業機を提供することを目的とする。
【解決手段】制御部3による制御は、トラクタ15の旋回中はアクチュエータ7を作業部27が直進するように制御し、その後、トラクタが旋回後の停止位置においては、スイッチ5aが操作されている間だけアクチュエータ7のみの制御により作業部27を直進させ、スイッチ5aが操作されなくなると作業部27は直進を中止することにより上記課題を解決する。
(もっと読む)
農作業機
【課題】本発明は、上記課題に鑑みて、トラクタに装着され、トラクタの基本情報及びトラクタの状態情報に基いて適切に制御可能な動作部を有する農作業機を提供することを目的とする。
【解決手段】制御部3は、あらかじめ記憶部に記憶されたトラクタに関する情報であるトラクタ基本情報101に基づき計算される基本動作パターンをトラクタから取得したトラクタ状態情報102により修正して実動作パターンを計算し、実動作パターンに基づいて、検出部8からの情報により動作部で目的の動作をさせるためにアクチュエータ7の稼動を制御することで上記課題を解決する。
(もっと読む)
農作業機
【課題】圃場の凹凸を検出しこれを均平にする。
【解決手段】代掻き作業機1は、走行機体に装着されて走行機体の走行に伴って進行し、走行機体からの動力によって回転するロータリ作業部13を備える。ロータリ作業部13の上方にシールドカバー15を設け、このカバー部の後端部にエプロン29を上下方向に回動可能に設け、エプロン29の後端部にレベラ31を上下方向に回動可能に設ける。ロータリ作業部13の前側に機体幅方向一端部から他端部間に亘って延びて上下方向に移動自在に支持された整地板23を設け、整地板23を移動自在に支持するリンク部材19に整地板23の上下移動から圃場の凹凸の高さを検出する凹凸検出センサ25を設ける。エプロン29は回動シリンダ51によって回動可能であり、凹凸検出センサ25によって検出された検出値に基づいて回動制御装置60が回動シリンダ51の作動を制御してエプロン29の傾き角度を調節する。
(もっと読む)
草抜き機
【課題】大きな異物の混入による破損を防止することができる草抜き機を提供する。
【解決手段】
本発明の草抜き機1は、前方に移動しながら地面に生えている草を引き抜く草抜き機であって、移動方向に対して直角方向かつ水平方向に設けられた回転軸41を中心に前方回転する第1のローラ4と、第1のローラ4の後方に並設され後方回転する第2のローラ5と、第1のローラ4を駆動させる第1の電動モータ43と、第2のローラ5を駆動させる第2の電動モータ47と、少なくとも第1の電動モータ43又は第2の電動モータ47のいずれかの過負荷状態を検知する過負荷検知手段と、第1の電動モータ43と第2の電動モータ47と過負荷検知手段とに接続された制御手段61とを備える。制御手段61は、過負荷検知手段により過負荷状態を検知したときに、第1の電動モータ43及び第2の電動モータ47の回転を所定時間反転させる。
(もっと読む)
除草機
【課題】従来、除草作業時に除草爪や機体の一部が収穫前の乾燥している作物(大豆)に接触し、作物(豆を覆っているサヤ(莢))に衝撃が加わって脱粒が発生し、多大の収穫ロスを招く問題があった。
本発明の課題は、作物(大豆)収穫前の除草作業時に、作物(大豆)に対する水分散布により作物(大豆のサヤ)を保湿することで脱粒を防止し、しかも、水分量のコントロールによって保湿性を良好にし、上記問題点を解消して収穫率の向上を図ることにある。
【解決手段】本発明は、走行車両の進行方向前側に設けられていて作物に対して水分を散布する水分散布手段と、進行方向後側に配置されていて左右の作物条列間における畝間に沿って移動し溝部の表土を掘削しながら除草する除草手段を備え、且つ、前記水分散布手段にはこの水分散布量を任意に増減できる散布量制御手段を設けてあることを特徴とする除草機の構成とする。
(もっと読む)
オフセット作業機及び制御方法
【課題】走行機体の進行に沿ったオフセット位置で圃場隅部までの連続的な前進作業を可能にする。
【解決手段】畦塗機100は、走行機体のオフセット位置で作業可能な作業部120と、この方向と位置の基準値を設定する記憶部と、作業部の方向及び位置を検出する角度センサ150及び位置センサ151と、作業部の方向及び位置を調整する方向シリンダ141及びオフセットシリンダ140と、これらのシリンダの駆動を制御する制御手段160を備える。制御手段160は、作業部の位置と方向を所定状態に維持して走行機体の走行に沿って作業部が作業する通常作業モード、予め設定された作業部の方向と位置を基準値とし、走行機体の走行方向の変化に伴う作業部の位置と方向の変化を調整して直線状作業を維持する自動直進作業制御モード、このモード終了時の位置を起点とし、圃場隅部に残存する未作業部分を直線状又は円弧状に作業する自動隅部作業制御モードを有する。
(もっと読む)
中耕除草機
【課題】一定の耕深を保って中耕を行う。
【解決手段】中耕除草機10は、トラクタ100後部の3点リンク機構205に連結するための連結機構70と、圃場の中耕を行う中耕機構30と、連結機構70と中耕機構30とを支持するフレーム機構120と、中耕機構30よりも機体進行方向前方のフレーム機構120に設けられ、未中耕の土壌表面Gに対する検出機構支持フレーム230下面の高さHaを検出する高さ検出機構220と、高さ検出機構220によって検出された高さHaを、トラクタ100の昇降調整機構216に伝達する高さ伝達機構240と、を備える。
(もっと読む)
1 - 20 / 27
[ Back to top ]