
Fターム[2B034HB41]の内容
土作業機(その他) (8,058) | 作物の中耕、管理又は除草機の構成 (516) | 調節機構 (65)
Fターム[2B034HB41]の下位に属するFターム
Fターム[2B034HB41]に分類される特許
1 - 4 / 4
回転式除草および砕土装置
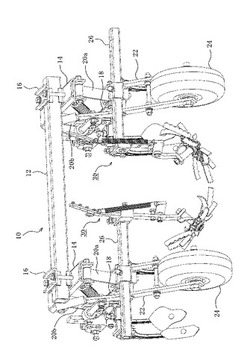
【課題】 効率的な除草および砕土作業を可能にする装置を提供することである。
【解決手段】 除草・砕土輪(36)を備え、除草・砕土輪が、ほぼ円板状のディスク(36a)と、ディスクの外周に所定間隔隔てて放射状に取り付けられた複数の第1ブレード(36b)と、第1ブレード間に放射状に取り付けられた複数の第2ブレード(36c)とを有し、第1ブレードが、僅かに湾曲させた細長いプレートの基端をディスクを含む平面にほぼ一致するようにディスクの外周に固定されており、第2ブレードが、第1ブレードよりも長く且つ第1ブレードよりも湾曲させた細長いプレートの基端をディスクを含む平面に対して鋭角度をなして傾斜するようにディスクの外周に固定されていることを特徴とする回転式除草および砕土装置(30)が提供される。
(もっと読む)
管理機装着除草機

【課題】管理機と除草機が前後に長く固定的に連結されていたのでは、管理機の走行車輪位置と除草装置の除草位置との違いによって走行車輪が作物を避けて走行しても除草装置が作物を傷つける場合があるので、これを防ぐような管理機装着除草機に構成にすることを課題とする。
【解決手段】水平回転する回転刃1を有する除草機2の機枠18前側左右中央を管理機3の後部に連結縦軸4で該機枠18が管理機3に対して左右屈曲可能に牽引装着して管理機装着除草機を構成した。そして、管理機(3)から除草機(2)に動力を伝動する伝動部(5)のユニバーサルジョイント(6)を連結縦軸(4)の上下どちらかに位置させている。
(もっと読む)
農業管理ロボット
【課題】田植え初期から適切に繰り返し遠隔操作や自動運転で、除草作業が出来る農業管理ロボット。
【解決手段】機体は、機体中央部の駆動用エンジン12を具備した構造で、車軸10と車輪9は着脱可能な除草をかねた前後左右車輪18、24,25,26で構成され、機体に搭載された駆動用エンジン12の出力を駆動用車軸10に出力供給し、前後車輪を回転する。機体側面と前後部に具備されている接触圧センサー18により稲株位置を感知し、エンジン12の車軸10への出力供給を、機体上部に搭載されているコンピュウタ19で車輪の、正転、逆転、停止、回転数変換を制御して、条間に沿って自動走行しながら土壌撹拌と除草作業をする。またスイッチの切り替えにより人が農業管理ロボットに具備されているカメラ7の映像を、遠隔操縦装置で映像を確認しながら遠隔操作ができる構成である。
(もっと読む)
携帯型作業機におけるエンジンの操作装置
【課題】 ランオン現象等を防止しながら、スロットルレバーの操作性を向上した携帯型作業機のエンジン操作装置を提供する。
【解決手段】 エンジン8と、エンジン8に接続された作業装置9と、作業装置9による作業中に操作可能な部位に設けられた、エンジンを操作する操作手段と、を備えている、携帯型作業機におけるエンジンの操作装置であって、前記操作手段が、エンジン8のスロットルバルブを全閉から全開の範囲で操作する第1操作具18と、エンジンを可動状態又は停止状態に切り換えるためのスイッチ39と、該スイッチを操作する第2操作具19と、を有し、前記第2操作具19が、前記スイッチ39をエンジン8の可動状態に操作したときに前記第1操作具18の操作位置を所定に規制し、前記スイッチ39をエンジン8の停止状態に操作したときに前記第1操作具18によるスロットルバルブの全閉操作を許容するように構成されている。
(もっと読む)
1 - 4 / 4
[ Back to top ]