
Fターム[2B034JB06]の内容
Fターム[2B034JB06]の下位に属するFターム
作動サイクルの連動 (6)
作動を停止させるもの (8)
Fターム[2B034JB06]に分類される特許
1 - 5 / 5
苗移植機
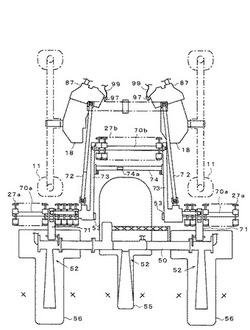
【課題】旋回時にも圃場が均され過ぎないように整地できる対地作業用の旋回ロータを備えた苗移植機を提供すること。
【解決手段】走行車体2の後部に圃場に苗を植え付ける苗植付部4の下部に圃場面を均す左右の整地ロータ27a,27bと、エンジン20の駆動力を後輪11に供給する左右の後輪ギアケース18を設けた苗移植機において、左右の前記ギアケース18から左右両側の整地ロータ27a,27aに駆動力をそれぞれ独立して供給する左右別々のロータ駆動軸70a,70bを設け、旋回動作させたときに、旋回内側の整地ロータ駆動軸70a,70bが旋回外側の整地ロータ駆動軸70a,70bよりも低速で回転する構成としたので旋回内側の整地ロータ27a,27bで圃場の泥土が柔らかくなり過ぎて流れてしまうことが防止できる。
(もっと読む)
対地作業機の検出装置

【課題】作業機フレームに吊下げ状に設ける検出橇の変形破損の防止を図る。
【解決手段】走行機体の後部ヒッチ13に対して昇降調整自在に作業機フレーム7を設け、該作業機フレーム7に対地作業機1を装着し、前記作業機フレーム7に対して上下位置変更調節自在に2対の平行リンク27,28で折り畳み可能な支持機構部25を取り付け、この支持機構部25には圃場面に接地して対地作業機1の対地作用深さ又は高さを検出するための検出橇24を設け、上記対地作業機1を上昇操作するとこの上昇動作に連動して検出橇24の後部側が持上がる姿勢に切り替える連携手段34を設ける。なお、前記支持機構部25と走行機体後部との間に連携手段としてのワイヤ38を連結する。
(もっと読む)
農作業機
【課題】走行機体からの動力を農作業機の作業部に伝達するか、農作業機以外の装置のために出力するかを切換可能とする農作業機を提供することを目的とする。
【解決手段】走行機体からの動力が少なくとも入力軸1を介し伝達される第1ベベルギア3と、第1ベベルギア3とかみあい動力が伝達される第2ベベルギア41と、第2ベベルギア41の回転軸線上の回転軸を有し第2ベベルギア41に対して片側に位置し動力を当該農作業機の作業部側へ伝達する駆動軸21と、第2ベベルギア41の回転軸線上の回転軸を有し第2ベベルギア41に対して駆動軸21とは逆側に位置し動力を当該農作業機以外の装置のために出力する外部出力軸31と、第2ベベルギア41の動力を駆動軸21に伝達するか外部出力軸31に伝達するかのいずれかを切換可能とするクラッチ部20と、を備えることで上記課題を解決する。
(もっと読む)
移植機の植付作業機
【課題】 整地ロータによる前方への泥土の飛びはねが防止された移植機の植付作業機を提供することを課題としている。
【解決手段】 走行機体1に昇降自在に連結される植付作業機7の上昇に連動して、回転駆動により圃場の表面から植付け深さまでの圃場表層の整地作業を行う整地ロータ16の上方の前方側を覆うカバー体を設けた。整地作業時の整地ロータ16の回転による後方側への泥土の飛びはねを防止するように、整地ロータ16の上方の後方側を覆うロータカバー36を回動作動部39によって前方に回動させ、ロータカバー36自体をカバー体にした。又は植付作業機7の上昇に連動して整地ロータ16の上方の前方側を、整地ロータ16に沿って覆うように移動する移動カバー体41をカバー体とした。
(もっと読む)
移植機
【課題】植付作業機の前方に整地ロータを設け、この整地ロータを圃場面に接地する作用位置と圃場面から離間した収納位置に変更可能になした移植機において、整地ロータへの駆動力の伝達を断ち、且つ整地ロータを接地させた状態のもとで誤って植付走行を行って圃場面を荒らすことがないように報知手段を設ける。
【解決手段】植付作業機15に対する整地ロータ34の相対的な高さを検出する高さ検出手段73と、整地ロータ34への駆動力の入切を検出する入力検出手段74を設け、前記高さ検出手段73によって整地ロータ34が作用位置にあることを検出すると共に、前記入力検出手段74によってロータ34への駆動力の切状態を検出した時、当該植付作業機15の接地走行を防止すべく報知手段76,77を作動させるように構成した。
(もっと読む)
1 - 5 / 5
[ Back to top ]