
Fターム[2B041DB01]の内容
農業機械一般(連結、尾輪、PTO等) (4,416) | 位置調整装置(尾輪等)の構成又は取付け (66) | 車輪又はそり (32)
Fターム[2B041DB01]の下位に属するFターム
Fターム[2B041DB01]に分類される特許
1 - 3 / 3
畦成形機
【課題】水田等の圃場の作業残隅部の畦成形作業を走行機を後進させて行うような熟練を要する作業機ではなく、制御装置や制御プログラムが簡易で操作が簡単であるとともに、全体の製造コストを低くできる畦成形機の提供。
【解決手段】走行機が畦から離れる方向に旋回走行しながら直線状の連続した畦を成形する非平行走行畦成形作業が行える制御部を有し、非平行走行畦成形作業時は、畦成形作業部4に畦成形作業部4の進行方向の変位量を検知する検知手段6が設けられていて、変位量に基づき第2水平回動手段を作動させて畦成形作業部4の進行方向を一定方向とする制御を行うとともに、第1水平回動手段はフリー状態と固定状態を交互に予め設定した実行時間で繰り返し行う制御のみにより制御されて畦成形作業を行う畦成形機による。
(もっと読む)
除草機

【課題】 機体全体の大型化及びコストアップを招くことなく、株元部分の除草位置及び除草範囲を簡単かつ容易に調節して常に適確良好な除草効果を発揮できるようにする。
【解決手段】 乗用走行機体4に昇降自在に連結された前後方向に長いフレーム22に接地ソリ23と、植付け条における株間に左右側方から作用するタイン24を前後複数に並設した株間除草手段10Aと、条間除草手段10Bとを取り付けてなる除草機であって、複数のタイン24を、左右方向に位置変更固定自在で、かつ、フレーム22に対する前後方向の傾斜角度変更固定自在に構成している。
(もっと読む)
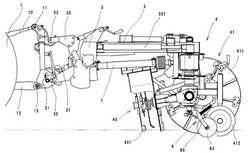
小型移動農機の尾輪体装着装置
【課題】機体後部にロータリ装置を備える小型移動農機において、移動用尾輪体の必要部分のみを迅速に着脱自在として、その取扱いを簡便化して効率良く作業が行えるようにする。
【解決手段】ロータリ装置4に備える耕深調整ステー16下部に移動用尾輪体22を装着できるように構成することによって、移動用尾輪体が小型で簡単に着脱可能であり、従来のように機体の移動とロータリ作業とを繰り返す度に、耕深調整ステーと尾輪体用のステーを付け替えるといった面倒な作業を不要にした。
(もっと読む)
1 - 3 / 3
[ Back to top ]