
Fターム[2B041HA14]の内容
農業機械一般(連結、尾輪、PTO等) (4,416) | 連結、PTO、尾輪等の制御 (292) | 制御手段又は制御方法 (73)
Fターム[2B041HA14]の下位に属するFターム
検出量の伝達又は処理 (31)
制御操作装置 (36)
Fターム[2B041HA14]に分類される特許
1 - 6 / 6
農業機械の制御部適合性判定システムおよび農業機械の制御部適合性判定方法
【課題】制御部の動作規格を容易かつ適切に適合判定可能な農業機械の制御部適合性判定システムおよび、農業機械の適合性判定方法を提供する。
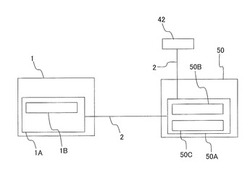
【解決手段】コントローラ(第1制御部)1Aとコントローラ(第2制御部)50Aとが最初に電気的に連結されたときに、コントローラ50Aが、コントローラ50Aに格納するロータリー耕耘機(第2作動部)50の固有情報である第2作動部情報をコントローラ1Aに送信して第2作動部初期情報として記憶する。そして、コントローラ1Aとコントローラ50Aとが電気的に切断された後、再び、コントローラ1Aとコントローラ50Aとが電気的に連結されたときに、コントローラ1Aがコントローラ1Aに格納されている第2作動部初期情報をコントローラ50Aに送信し、コントローラ50Aが、受信した第2作動部初期情報と第2作動部情報とを照合し、コントローラ1Aとコントローラ50Aとの適合性を判定する。
(もっと読む)
畦塗り機

【課題】トラクタにオフセット作業が行えるように装着された畦塗り作業機の自由度を制御して、精度の高い連続作業を可能にする。
【解決手段】走行機体2の後方に装着され、側方にオフセットした位置で作業部51が前進畦塗り作業を行う畦塗り機50において、作業部51の位置及び方位を検出する位置方位センサ20と、走行機体2と作業部51との相対位置を制御する第一の自由度を構成する手段と、作業部51の姿勢を制御するための第二の自由度を構成する構成手段と、前記第一の自由度および第二の自由度における水平回動量または水平移動量を制御する手段を備え、圃場隅部における走行機体2の姿勢変化に対応して、位置方位センサ20からの情報に基づき前記第一の自由度および第二の自由度における水平回動量または水平移動量を制御し、作業部51が畦に沿って直進姿勢を保持し、圃場の隅部付近までの直進作業状態を維持させる。
(もっと読む)
作業機
【課題】車体に対する作業機の装着にあたり、装着手順を間違えると、ドッキングミスなどによる不慮の事故を招いたり、作業機の姿勢変化によって正常な作業ができなくなる問題がある。
本発明の課題は、作業機の着脱作業順序を音声によって一行程づつオペレータに案内報知することで、上記問題点を解消し、作業の安全化を図ることにある。
【解決手段】 本発明は、走行車両に着脱ヒッチを介して作業装置を着脱可能に構成して設け、作業装置の着脱において、着脱を要する複数の連結部を備え、各連結部の着脱を促す音声案内を着脱作業が必要な順に順次出力する音声出力手段(37)を設ける。
(もっと読む)
農作業機
【課題】遠隔操作手段の操作部の数を増やしても接続ケーブルの電線本数を増やす必要がない農作業機を提供する。
【解決手段】農作業機1は、制御手段5と、この制御手段5に接続ケーブル7を介して接続した遠隔操作手段6とを備える。接続ケーブル7は、4本の電線、すなわち電源線16、接地線17、第1シリアル信号線18および第2シリアル信号線19からなる。第1シリアル信号線18は、遠隔操作手段6から制御手段5にシリアル信号を送るための信号線である。第2シリアル信号線19は、制御手段5から遠隔操作手段6にシリアル信号を送るための信号線である。
(もっと読む)
農作業機
【課題】トラクタからの外部電源が不要でトラクタから下りて手作業で配線接続をする必要がない農作業機を提供する。
【解決手段】農作業機1は、トラクタ2のPTO軸6側からの動力で作動する油圧ポンプ31と、この油圧ポンプ31に接続した油圧モータ32とを備える。農作業機1は、トラクタ2のPTO軸6側からの動力で作動する発電手段41と、この発電手段41に接続した電動モータ42とを備える。農作業機1は、油圧モータ32からの動力と電動モータ42からの動力とを合成して耕耘手段11を駆動する動力合成手段47を備える。
(もっと読む)
電動車
【課題】 従来の作業台車にモータを搭載する場合、作業者は野菜苗の植付け作業とモータの操作との2つの処理を行う必要が生じる。しかしながら、作業者の意識は自身の手元にあるため、作業台車が移動する方向に注意が払われていない状態にある場合が多いといえる。そのため、圃場上又は畝上に何らかの障害物等があった場合に、作業台車が該障害物に衝突してしまう恐れがある。この場合、作業台車を低速で移動させていたとしても、作業者に対して衝突による不快感を与えることになる。
【解決手段】 モータ61を具備し、作業者等がシート33着座しながら野菜苗の植付け作業等を行う電動車に、畝又は圃場上の障害物を検知するための超音波センサ12と、該超音波センサ12によって障害物が検知され、且つ該障害物が予め設定された距離の範囲内にあると判断した場合に、モータ61を停止又は減速するための制御装置10と、を設けたものである。
(もっと読む)
1 - 6 / 6
[ Back to top ]