
Fターム[2B043AA03]の内容
農業機械一般(操向) (6,001) | 用途又は対象 (528) | 操向に関するもの (440)
Fターム[2B043AA03]の下位に属するFターム
操向制御に関するもの (302)
Fターム[2B043AA03]に分類される特許
1 - 20 / 138
乗用管理機
作業車両
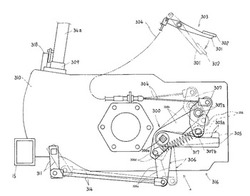
【課題】旋回に連動して切状態となる旋回内側のサイドクラッチの切状態の解除操作機構をコンパクトに構成し、広い取付スペースを必要としない作業車両を提供する。
【解決手段】走行車体に走行装置を設け、走行装置への駆動力を入切する切替伝動装置300を入切操作する操作部材305を設け、走行車体を操向操作する操舵部材を旋回操作すると切替伝動装置300を操作部材305を介して切操作する旋回連動機構Aを設けた作業車両において、旋回連動機構Aと操作部材305の間に旋回連動状態を解除する解除操作部材307を設けると共に、この解除操作部材307を旋回連動状態と連動解除状態に切り替える解除切替部材303を設けて構成する。
(もっと読む)
苗移植機

【課題】作業者が目視できない機体後方の苗植付装置とその近傍の情報を操縦席に着席したまま確認できるようにして、正しい圃場位置に苗を植え付けることができる構成を備えた苗移植機を提供すること。
【解決手段】苗を積載する複数条の苗タンク51に苗タンク51と走行車体2後方の情報を検出するCCDカメラ48と、該CCDカメラ48が検出した情報を表示する表示装置16を操縦部33に配置し、カメラ48が検出した情報から苗の植付条列や畦際を制御装置100で判断し、表示装置16に次の植付作業位置を示す第1植付仮想線P1及び圃場と畦際の境界線を示す第1畦際仮想線L1を出力することにより、走行車体2の後方の苗の植付状態や苗タンク51に積載した苗の状態を操縦部33から移動することなく確認することができ、苗の植付姿勢や植付深さの変更を速やかに行えるため、苗の植付姿勢が安定する。
(もっと読む)
歩行型管理機
【課題】デファレンシャル機構を備えた歩行型管理機において、デフロック機構によって、旋回の開始に連動してデファレンシャル機構が機能し、旋回後、耕耘作業の開始に連動してデファレンシャル機構の機能が停止する歩行型管理機を提供する。
【解決手段】耕耘装置11に抵抗棒25を回動自在に設けて、抵抗棒25とデファレンシャル機構とを連繋し、抵抗棒25が耕耘抵抗によって回動すると、連動してデフロック機構が作用状態に切換わり、抵抗棒25が土中から出て、耕耘抵抗がなくなり元の位置に回動すると、連動してデフロック機構が非作用状態に切換わるように構成した。
(もっと読む)
電動農作業車のモータ制御装置
【課題】走行動力及び作業動力を発生させる動力用電動モータと、油圧ポンプを駆動させる油圧ポンプ用電動モータとをそれぞれ別々に備える2モータ方式の電動農作業車において、バッテリ消費を抑える。
【解決手段】走行機体1に昇降自在に連結される植付作業機3と、該植付作業機3を昇降させる作業機昇降用油圧シリンダ4と、該作業機昇降用油圧シリンダ4に圧油を供給する油圧ポンプ15と、該油圧ポンプ15を駆動させる油圧ポンプ用電動モータ5Bと、走行動力及び作業動力を発生させる動力用電動モータ5Aと、動力用電動モータ5A及び油圧ポンプ用電動モータ5Bの駆動を制御するモータ制御装置23と、を備える電動乗用田植機において、モータ制御装置23は、植付作業機3の昇降動作固定状態を検出すると共に、植付作業機3が昇降動作固定状態のときは、油圧ポンプ用電動モータ5Bの駆動を休止させる。
(もっと読む)
作業車
【課題】旋回操作の自由度が高く実用性が高い作業車を提供する。
【解決手段】芝刈り作業車1は、車幅方向に延びる軸線Ax1を回転中心として回転駆動されるドラム式車輪18L、18Rを有する芝刈りユニット2と、芝刈りユニット2に連結されたフレーム10と、フレーム10に設けられた操舵駆動装置11と、を備え、操舵駆動装置11は、車幅方向に配置された一対の操舵輪40L、40Rと、一対の操舵輪40L、40Rの各操舵輪を独立して転舵可能な操舵部41L、41Rと、一対の操舵輪40L、40Rを回転駆動できる車輪駆動部42L、42Rと、を備える。
(もっと読む)
歩行型管理機
【課題】主クラッチレバー及び駐車ブレーキレバーを連動させつつも、両レバーの配置の自由度を充分に確保できる歩行型管理機を提供する。
【解決手段】主クラッチ4dの「入」「切」の切替操作をする主クラッチレバー30と、ブレーキ装置11の「作動」「解除」の切替操作をする駐車ブレーキレバー50と、前記主クラッチレバー30と前記駐車ブレーキレバー50が配置されるハンドル18と、を具備する歩行型管理機において、前記主クラッチレバー30と前記駐車ブレーキレバー50とを連動ワイヤー29を介して連動連結した。
(もっと読む)
農作業機のモニタパネル
【課題】
表示モニタに付着した泥土や水などを速やかに取り除くことができると共に、取り除く際に表示モニタに傷がつきにくい掃除機能付きのモニタパネルを提供する。
【解決手段】
作業機1を装着して圃場を走行しながら対地作業する車体2の操作ボード3部に、液晶モニタ4の表面を透明なモニタパネル5で被覆し、このモニタパネル5の外周部にワイパー6の両端部を摺動案内するワイパレール7、8を設け、このワイパー6をワイパレール7、8に案内させて移動することによりモニタパネル5の表面を清掃する構成とする。
(もっと読む)
作業車両
【課題】本発明の課題は、パワステコントローラをエンジンとミッションケースの合わせ部近傍に配置し、且つ、車両左側部のスタータセルモータとエキゾーストマニホールドとの略中間部に配置することによって、パワステコントロールとステアリングハンドル間の距離を短縮し、且つ、ステアリングシャフトのジョイント部の折れ点を少なくして操作性の向上を図る。
【解決手段】ステアリングハンドル6の操作でパワステを介して左右の前輪4,4を操向制御するパワステコントローラ16をエンジンEとミッションケース3の合わせ部近傍で車両の左側に位置するスタータセルモータ12とエキゾーストマニホールド13の上下方向中間部に配置してあることを特徴とする作業車両とする。
(もっと読む)
作業車両
【課題】操向位置を検出する検出センサをシンプルな構成で容易に走行機体側へ設置できるとともに、設置した検出センサが圃場から飛散した泥水等の付着によって故障することを防止できる作業車両を提供することを課題としている。
【解決手段】操向位置を検出する検出センサ48を備えた作業車両であって、ステアリングシャフト33の回転を減速して前記検出センサ48に伝える減速機構47を、該ステアリングシャフト33に設け、検出センサ48からのステアリングシャフト33の回転によって、操向位置を検出する。
(もっと読む)
田植機のステアリングコラム
【課題】ステアリングシャフトとトルクジェネレータの連結部の錆付きを防ぐとともに、グリス注入を容易として作業性を向上させた田植機を提供する。
【解決手段】ステアリングハンドル軸53,55にステアリングコラム56を覆設したステアリングシャフト52の下端を、トルクジェネレータ58に連結部57を介して連結し、連結部57では、カラー59を装着したステアリングシャフト52の下端部を、取付フランジ61を介してトルクジェネレータ58に支持させ、カラー59は、トルクジェネレータ58の上面に接する底部周面に、開口部60を形成するとともに、取付フランジ61の底部にも開口部60と連通する開口部63を形成したものである。加えて、カラー側開口部60と、取付フランジ側開口部63のそれぞれを組立てることによって、ラビリンス形状Lを構成した。
(もっと読む)
歩行型農業作業車
【課題】差動装置を備えた歩行型農業作業車のミッションケースを小型化する。
【解決手段】差動装置20は、2つの遊星歯車機構21と、回転自在に設けられたピニオンギア22と、を有する。2つの遊星歯車機構21がそれぞれ有するサンギア23同士は、その回転軸が同一軸線上に配置される。2つの遊星歯車機構21がそれぞれ有するインターナルギア部材27は、ピニオンギア22に噛み合う。2つの遊星歯車機構21がそれぞれ有するサンギア23は、車輪用モータ19の出力軸29に固定される。そして、2つの遊星歯車機構21がそれぞれ有するプラネタリキャリア24から、それぞれ駆動力が取り出される。この構成により、車輪用モータ19の出力軸29と、差動装置20からの出力の取り出し軸(車軸9)と、を同軸に配置することができるので、車輪用モータ19から差動装置20まで駆動を伝達するための部材(チェーン等)が不要となる。
(もっと読む)
水田作業車
【課題】水田作業車において、右又は左のマーカーが自動的に作用姿勢に操作される機能及び作業装置が自動的に作業状態に操作される機能を備えた場合、両方の機能を適切に作動及び停止状態に設定することができるように構成する。
【解決手段】マーカー操作手段54及び作業装置操作手段55の両方が作動する作動状態と、マーカー操作手段54及び作業装置操作手段55の両方が停止する停止状態とを設定するもので、人為的に操作される単一の人為操作具46を備える。
(もっと読む)
作業車の車体状態切り換え構造
【課題】車体の状態を第1状態から第2状態に切り換える際の判断基準に創意工夫を凝らすことにより、作業走行時において車体の状態が不測に第1状態から第2状態に切り換わる誤作動の発生を抑制し、その誤作動に起因した不都合の発生を抑制する。
【解決手段】操舵輪の直進位置からの切れ角を検出する切角センサ55と、この切角センサ55の検出に基づいて車体の状態を切り換える車体状態切換手段48とを備えた作業車の車体状態切り換え構造において、車体の走行速度を検出する車速センサ56を備え、車体状態切換手段48が、切角センサ55の検出、および、車速センサ56の検出に基づいて、車体の旋回角度を算出し、かつ、算出した旋回角度が設定角度を超えると、車体の状態を車体に連結した作業装置を機能させる作業用の第1状態から作業装置を機能させない移動用の第2状態に切り換えるように構成した。
(もっと読む)
乗用型作業機の走行変速装置
【課題】田植機等の乗用型農作業機において、走行変速装置の組み立ての容易性向上や部材の強度アップ等を図る。
【手段】走行変速装置は走行ミッションケース9を有する。走行ミッションケース9は深さが深い本体部9aと浅い深さの蓋部9bとの2つ割構造になっており、内部に軸やギア等が配置されている。本体部9aの内部には板状の中間部材87が固定されており、この中間部材87で軸が支持されている。軸の支持スパンを短くできるため、軸の支持強度がアップすると共に耐久性も向上する。軸の安定性が高くなるため、蓋部9bを取り外してから再取り付けすることが容易になる。従って、メンテナンスも楽に行える。
(もっと読む)
薬液散布作業車両
【課題】GPSからの速度情報が気象、地形などの影響を受けて得難い場合にも車速を知ることができ、得られた車速に基づき薬液散布量が制御可能な薬液散布作業車両を提供すること。
【解決手段】位置情報と速度情報をGPSから受信できるGPS受信機81と車輪12又は13の回転数を検出する車速センサ4と薬液を吐出する防除ポンプ65による薬液吐出圧力に応じて薬液散布量を調節する防除機Bを備えており、GPSからの情報に基づき車速VG及び/又は車速センサ4による車速Vs又は車速VGと車速Vsの平均化された車速と、予め設定された単位面積当たりの薬液散布量Aとの関係から防除ポンプ65の吐出圧力を計算し、該吐出圧力計算値に一致するように薬液流量調節弁73の開度の調整をして予め設定された単位面積当たりの薬液散布量Aが均一になるように制御する制御装置100,101を備えている薬液散布作業車両である。
(もっと読む)
農用作業車
【課題】防除散布装置及び薬液タンクを備えた農用作業車において、薬液タンクを搭載したままでリヤアクスルケースのオイル交換をできるようにする。
【解決手段】防除散布装置11及び薬液タンク9を備えた農用作業車において、走行車体2の後側部には後輪への伝動装置を内装しているリヤアクスルケース36を左右方向に沿わせて配設し、リヤアクスルケース36の左右両側部に左右後輪ファイナルケース41,41を取り付け、左右後輪ファイナルケース41,41の下端部に左右後輪4,4を支架する。リヤアクスルケース36の左右外側端部のいずれか一方に給油口43を設けるにあたり、走行車体2の後部に搭載している薬液タンク9よりも平面視で左右外側に突出している部位に給油口43を設ける。
(もっと読む)
自動耕作方法、及び自動耕作システム
【課題】農地における農作業を効率よく簡便に行えるようにする。
【解決手段】隣接配置された複数のアンテナを備える基地局200を農地4の近傍に設け、アンテナの夫々から無線信号を送信し、農機300に、情報処理装置と、アンテナの夫々から送信される無線信号の位相差に基づき自身の現在位置を標定する位置標定装置411とを設け、サーバ装置100に、農機300による農作業の対象となる農地4について、農機300が、直進走行、農地4の境界近傍での180°方向転換、及び当該方向転換前の当該経路から所定の間隔をあけての直進走行の再開、を順に繰り返し行うようにコースを生成し、生成したコースを農機300に送信し、農機300が、位置標定装置によって標定される現在位置と受信したコースとに基づきコースに沿って自律走行するようにする。
(もっと読む)
水田除草ロボット
【課題】本発明は、水田の稲列の末端で稲列を踏み潰さずにUターン反転することができる、水田の稲列を認識して自走する小型の水田除草ロボットを提供する。
【解決手段】本発明の水田除草ロボットは、2つの矩形の第一台座1及び第二台座2を突き合わせて枢支し、互いに起伏回転可能に連結した台座ユニット3と、前記第一台座1下面に設けた垂直軸(図示省略)に水平回転可能に連結された第一ターンテーブル4と、前記第二台座2下面に設けた垂直軸(図示省略)に水平回転可能に連結された第二ターンテーブル5と、前記第一ターンテーブル4に固定され、クローラ6を備えた第一走行ユニット7と、前記第二ターンテーブル5に固定され、クローラ6を備えた第二走行ユニット8と、前記台座ユニット3上に載置され、図示しないエンジン発電機、制御基板、カメラ、電源装置を内蔵した制御ユニット9とから構成されている。
(もっと読む)
歩行型作業機
【課題】移動作業及び移動作業以外の各種作業の、両方において、作業性が高い歩行型作業機を提供する。
【解決手段】歩行型作業機10は、動力源12L,12Rと、走行部13L,13Rと、操作ハンドル14L,14Rと、作業者が操作ハンドルと共に握っているときだけオン位置に変位して走行部を走行可能なオン状態に切替操作する走行準備レバー41と、オン位置にある走行準備レバーをそのままオン位置に保持するように操作するレバー保持操作機構50と、レバー保持操作機構によって走行準備レバーをオン位置に保持していることを検知するオン位置検知部61と、オン位置検知部の検知を受けて走行部の走行速度が制限速度を超えないように制限する速度制限部とを備える。速度制限部は制御部75に有する。
(もっと読む)
1 - 20 / 138
[ Back to top ]