
Fターム[2B043AB19]の内容
農業機械一般(操向) (6,001) | 目的、効果又は機能 (649) | 安全性又は信頼性の向上 (53)
Fターム[2B043AB19]に分類される特許
1 - 20 / 53
乗用管理機
水田作業機
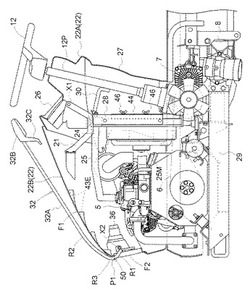
【課題】センターマスコットをボンネットの前端付近から後方上方に延出された第1姿勢にした場合にセンターマスコットの基端部付近がボンネットの前端よりも前方に突出する傾向が少なく、搬送時などにもセンターマスコットに損傷を受け難い水田作業機を提供する。
【解決手段】機体1の前部に備えられたボンネット22と、ボンネット22の前端付近に配置された横向き軸心X2回りで、前端付近から後方上方に延出された第1姿勢と、少なくとも前端付近から上方に延出された第2姿勢との間で揺動操作可能なセンターマスコット32とを備え、ボンネット22の前端に、少なくとも第1姿勢におけるセンターマスコット32の基端付近を収納可能な凹部50を設けた。
(もっと読む)
歩行型管理機

【課題】主クラッチレバー及び駐車ブレーキレバーを連動させつつも、両レバーの配置の自由度を充分に確保できる歩行型管理機を提供する。
【解決手段】主クラッチ4dの「入」「切」の切替操作をする主クラッチレバー30と、ブレーキ装置11の「作動」「解除」の切替操作をする駐車ブレーキレバー50と、前記主クラッチレバー30と前記駐車ブレーキレバー50が配置されるハンドル18と、を具備する歩行型管理機において、前記主クラッチレバー30と前記駐車ブレーキレバー50とを連動ワイヤー29を介して連動連結した。
(もっと読む)
苗移植機
【課題】
畦際作業の際に、線引きマーカが一側に連続して作動し、畦や圃場に植え付けた苗に線引きマーカが接触することを防止可能な苗移植機を提供する。
【解決手段】
畦際での植付作業を検知する畦際検知部材76を設け、畦際検知部材76が畦際での植付作業を検知すると、苗植付部4を昇降させてもマーカ切替装置72の線引きマーカ68の作動方向を切り替えない構成とすると共に、畦際検知部材76が畦際での植付作業を検知すると線引きマーカ68の昇降回数を記憶する作動回数検知部材77を設け、作動回数検知部材77の検知回数が所定回数未満であるときは苗植付部4を昇降させてもマーカ切替装置72の作動方向を切り替えない構成とすると共に、作動回数検知部材77の検知回数が所定回数以上になると線引きマーカ68が圃場に線を形成しないようにマーカ切替装置72の作動を停止する構成とする。
(もっと読む)
農作業機のモニタパネル
【課題】
表示モニタに付着した泥土や水などを速やかに取り除くことができると共に、取り除く際に表示モニタに傷がつきにくい掃除機能付きのモニタパネルを提供する。
【解決手段】
作業機1を装着して圃場を走行しながら対地作業する車体2の操作ボード3部に、液晶モニタ4の表面を透明なモニタパネル5で被覆し、このモニタパネル5の外周部にワイパー6の両端部を摺動案内するワイパレール7、8を設け、このワイパー6をワイパレール7、8に案内させて移動することによりモニタパネル5の表面を清掃する構成とする。
(もっと読む)
トラクタ
【課題】左右ブレーキの連結を自動的に確保し、路上走行の安全を図る。
【解決手段】走行車体に左右に並設されている左右ブレーキぺダルと、該左右ブレーキぺダルを連結状態としたりあるいは非連結状態とするブレーキ連結解除手段と、ロータリ耕耘装置を昇降回動するリフトアームと、作業モードを走行軽作業モードと耕耘重作業モードに切り換える作業切換ダイヤルと、前記リフトアームの昇降状態を検出するリフトアーム昇降センサと、前記ブレーキ連結解除手段を切換作動するブレーキ連結解除アクチュエータとを備えたトラクタにおいて、前記作業切換ダイヤルを耕耘重作業モード以外への切換状態で、前記リフトアーム昇降センサが前記リフトアームの所定高さ以上の上昇検出をすると、左右ブレーキ連結解除アクチュエータを連結作動し非連結状態にあるブレーキ連結解除手段を左右連結状態にするコントローラを設けたことを特徴とするトラクタとする。
(もっと読む)
作業機
【課題】機体の旋回走行が終了して次回の作業行程にて作業走行するときに、作動部を時間遅れなく作動状態にすることが可能となる作業機を提供する。
【解決手段】電動モータM3の操作によって作動状態と非作動状態とに切り換え操作自在な作動部が、作動状態側に切り換えてから起動用所要時間が経過したのちに作動状態に切り換わるように構成され、旋回行程中における機体の位置を検出する機体位置検出手段51と機体の走行速度を検出する車速検出手段50との検出情報に基づいて、機体が旋回走行を開始したのちに旋回終了位置に至ると予測される時点よりも起動用所要時間に相当する時間だけ前の時点における機体位置に至ると予測されるタイミングを求めて、そのタイミングにて電動モータM3を作動状態側に切り換える作動部操作手段53と、前記タイミングを補正する人為操作式のタイミング補正手段100とが備えられている。
(もっと読む)
田植機
【課題】旋回時自動昇降制御において苗の空植えを防止する。
【解決手段】田植機1は、上下に昇降可能な植付部3と、植付部3への駆動力を断接制御する植付クラッチ50と、車体旋回時に植付部3の昇降及び植付クラッチ50を制御する旋回時自動昇降制御を行う制御部と、を備える。旋回時自動昇降制御において、制御部は、旋回中又は旋回終了後の所定のタイミングで植付部3を自動的に下降させる。また制御部は、旋回終了後に、旋回開始前の植付中断位置に対応する植付再開位置まで車体が到達したときに植付クラッチ50を接続して植付を再開する。そして当該制御部は、植付部3を下降させるタイミングを、車体の走行速度に応じて変更する。
(もっと読む)
芝刈機
【課題】境界検出手段を支持するための支持構造を簡単なものにすることが可能でありながら、境界検出手段により既刈り領域と未刈り領域との刈跡境界を精度よく検出することが可能となる芝刈機を提供する。
【解決手段】走行駆動装置11R,11Lにより直進並びに旋回走行自在に走行駆動される走行機体の走行に伴って芝を刈り取るモーア4と、既刈り領域と未刈り領域との刈跡境界を検出する境界検出手段Qと、境界検出手段Qの検出情報に基づいて走行用の所定の制御を実行する制御手段とを備え、境界検出手段Qが、モーア4の刈刃ハウジング7における前側縦壁部7B1の前面にて芝の存否を検出するように構成されている。
(もっと読む)
移植機
【課題】走行機体を左右何れに旋回させるかを示す方向指示の表示を行う左右一対の表示ランプによって、マーカの振出し状態表示や、所定状態の報知を兼用してコスト削減を図った場合であっても、オペレータや周囲の者に対して方向指示の表示を確実に視認させることのできる移植機を提供することを課題としている。
【解決手段】左右一対の表示ランプ18,27と、方向指示の操作を検出する操作検出手段47,48と、左右の表示ランプ18,27による方向指示の表示を行う制御部46とを備え、マーカ19を植付作業機8の左右に配置し、該マーカ19の振出し状態の表示を前記左右の表示ランプ18,27によって行うように前記制御部46を構成した移植機であって、表示ランプ18,27による方向指示の表示を行っている間は、表示ランプ18,27によるマーカ19の振出し状態の表示を行わないように前記制御部46を構成した。
(もっと読む)
防除作業機
【課題】圃場に散布される薬剤のばらつきを抑制すること。
【解決手段】圃場に薬剤を散布する防除作業機は、GPS衛星から送信される電波を受信するGPS受信部10と、GPS受信部10から得られる防除作業機の進行方向における位置情報と、前記薬剤の散布幅とに基づいて、防除作業機が旋回した後に圃場の薬剤を散布する領域へ進入する進入位置を求める制御用プロセッサ40を含む制御装置9と、進入位置を表示する表示部11Dと、を含む。
(もっと読む)
作業車の車体状態切り換え構造
【課題】車体の状態を第1状態から第2状態に切り換える際の判断基準に創意工夫を凝らすことにより、作業走行時において車体の状態が不測に第1状態から第2状態に切り換わる誤作動の発生を抑制し、その誤作動に起因した不都合の発生を抑制する。
【解決手段】操舵輪の直進位置からの切れ角を検出する切角センサ55と、この切角センサ55の検出に基づいて車体の状態を切り換える車体状態切換手段48とを備えた作業車の車体状態切り換え構造において、車体の走行速度を検出する車速センサ56を備え、車体状態切換手段48が、切角センサ55の検出、および、車速センサ56の検出に基づいて、車体の旋回角度を算出し、かつ、算出した旋回角度が設定角度を超えると、車体の状態を車体に連結した作業装置を機能させる作業用の第1状態から作業装置を機能させない移動用の第2状態に切り換えるように構成した。
(もっと読む)
移植機
【課題】電動ステアリング機構と、電動ステアリング機構を介した操向制御を行う制御部を備え、直進走行後に走行機体を旋回させるための操向操作を自動的に行う自動旋回制御を行うにあたり、オペレータの意図に沿って自動旋回制御を実行する移植機を提供することを課題とする。
【解決手段】本発明は、電動ステアリング機構34と、電動ステアリング機構34を介した操向制御を行う制御部21とを備え、制御部21が、直進走行後に走行機体4を旋回させるための操向操作を自動的に行う自動旋回制御を行う移植機であって、走行機体4の旋回方向を選択する操作を検出する操作検出手段を設け、制御部21は、操作検出手段によって旋回方向の選択操作が検出されたことを少なくとも1つの条件とし、畦際での旋回である小回り旋回が可能な切れ角になるまで該選択された旋回方向に電動ステアリング機構34を自動的に操向作動させる自動旋回制御を実行する。
(もっと読む)
乗用型苗移植機
【課題】 小型の走行車体を得ると共に、安全性を向上させる。
【解決手段】 変速レバー82を支持するレバー支持アーム90を設け、変速レバー82を中立位置に戻す中立復帰アーム83を支持軸71に設け、中立復帰アーム83には上部復帰ローラ83aと下部復帰ローラ83bを設け、変速レバー82が中立位置のときは、ブレーキペダル70を操作しても上部復帰ローラ83a及び下部復帰ローラ83bがレバー支持アーム90に接当せず、変速レバー82が前進側に操作されているときは、ブレーキペダル70の操作により下部復帰ローラ83bがレバー支持アーム90の下面に接当して変速レバー82を中立位置に戻し、変速レバー82が後進側に操作されているときは、ブレーキペダル70の操作により上部復帰ローラ83aがレバー支持アーム90の上面に接当して変速レバー82を中立位置に戻す構成とした。
(もっと読む)
薬剤散布用管理作業車両
【課題】GPSセンサによって得られる機体の移動速度を散布車速として車速連動により所要の面積密度で薬剤を散布する際に、散布走行速度の検出精度について妥当性の判断を可能とする薬剤散布用管理作業車両を提供する。
【解決手段】薬剤散布用管理作業車両は、圃場走行可能に機体を支持する前輪3及び後輪4と、GPS電波を受けて機体位置を検出するGPSセンサS2と、このGPSセンサS2によって得られた機体の移動速度であるGPS車速VGを散布車速として車速連動により散布動作する散布装置Dとを備えて単位面積当たり所定の薬液量で薬剤散布走行が可能に構成され、上記前輪3及び後輪4の走行動作を検出する車速センサS1を設け、この車速センサS1に基づいて前輪3及び後輪4の走行動作と対応する機体の計算車速Vsを算出し、この計算車速Vsと上記GPS車速VGとを区別して表示するモードを設けたものである。
(もっと読む)
薬剤散布用管理作業車両
【課題】単位面積当たり所定量の薬液散布による適正な薬剤散布のために、高精度の散布速度を安定して取得することができる薬剤散布用管理作業車両を提供する。
【解決手段】薬剤散布用管理作業車両は、圃場走行可能に機体を支持する前輪3及び後輪4と、散布車速を連動基準として散布量制御する制御部Cにより単位面積当たり所定量の薬液量で薬剤散布を行う車速連動散布装置Dとを備えて構成され、上記前輪3及び後輪4の駆動動作を検出する駆動センサS1とGPS電波を受けて機体位置を検出するGPSセンサS2とを設け、このGPSセンサS2によって得られた機体の移動速度を散布車速として車速連動散布装置Dを散布量制御するとともに、駆動センサS1によって得られる機体の駆動速度について上記移動速度との差から算出される前輪3及び後輪4のスリップ率を取出し可能に保持する格納部C1を備えたものである。
(もっと読む)
乗用型苗移植機
【課題】 乗用型苗移植機において、旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性の点において課題があった。
【解決手段】 ステアリングハンドルにて操向操作される左右前輪と、左右後輪を設けた走行車両に、苗移植作業装置を昇降自在に装着した乗用型苗移植機において、走行距離算出手段にて苗移植作業装置を上昇させる指令を出力してからの走行距離を算出して、該走行距離に応じて制御することにより、先ず苗移植作業装置が下降する指令を出力し、その後に線引きマーカを下降させる自動旋回モードを設けた。
(もっと読む)
乗用型田植機
【課題】植付部が自動的に昇降する際の安全性を向上させた乗用型田植機を提供する。
【解決手段】乗用型田植機は、車体と、報知部と、植付部と、植付部を上下に昇降するための昇降シリンダと、昇降シリンダの駆動を制御する制御部と、を備える。そして、前記制御部は、植付部を自動的に昇降させる制御を開始するトリガを検出した場合、前記報知部によって植付部の自動昇降を報知した後、昇降シリンダを駆動して植付部を昇降させる。
(もっと読む)
遠隔操作式農業用トラクター
【課題】本発明は、実際に農圃でトラクターに搭乗せずとも、離れた場所からトラクターを遠隔操作することによって、快適かつ安全に作業をすることができ、また、トラクターの過去の運転状態を記憶させることによって、同じ農圃であれば、無人で自動的に反復して農作業をすることができる遠隔操作式トラクターを提供するものである。
【解決手段】エンジンを動力とする走行装置と、前記エンジン駆動により作業機に回転動力を伝達する装置と、前記作業機を牽引しかつ昇降できる作業機用昇降機と、を有する農業用トラクターにおいて、前記農業用トラクターと離れた位置にある遠隔送信機の操作信号を受信し、前記操作信号により前記農業用トラクターの走行速度と走行方向と作業機への伝達回転と作業機の昇降とを制御する指令を出す制御装置を有することを特徴とする遠隔操作式農業用トラクター。
(もっと読む)
水田除草ロボット
【課題】条間、株間を自由に移動し、且つ、安定した除草効果が得られる除草ロボットを提供する。
【解決手段】水田除草ロボット1は、水田の稲株が通過可能な逆凹状の空間を有したメインフレーム10は、その下部に、車輪19A,19B、車輪19A,19Bを回転駆動する駆動部11A,11B、車輪19A,19Bの前後に配置されて水田除草ロボット1に浮力を生じさせる第1のフロート20A〜20D、全部に設けられて水田内の稲株を検知するセンサレバー23A,23B、メインフレーム10に搭載されたセンサ類に基づいて駆動部11A,11Bを駆動し、車輪19A,19Bの回転を制御する。これにより、水田除草ロボット1は稲株を避けながら自律走行する。
(もっと読む)
1 - 20 / 53
[ Back to top ]