
Fターム[2B043BA09]の内容
農業機械一般(操向) (6,001) | 車両の種類 (615) | 自律走行車両(学習操向車両) (32)
Fターム[2B043BA09]に分類される特許
1 - 20 / 32
作業車
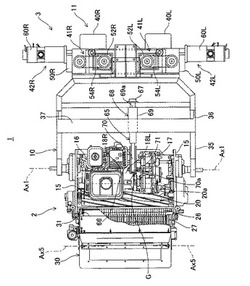
【課題】旋回操作の自由度が高く実用性が高い作業車を提供する。
【解決手段】芝刈り作業車1は、車幅方向に延びる軸線Ax1を回転中心として回転駆動されるドラム式車輪18L、18Rを有する芝刈りユニット2と、芝刈りユニット2に連結されたフレーム10と、フレーム10に設けられた操舵駆動装置11と、を備え、操舵駆動装置11は、車幅方向に配置された一対の操舵輪40L、40Rと、一対の操舵輪40L、40Rの各操舵輪を独立して転舵可能な操舵部41L、41Rと、一対の操舵輪40L、40Rを回転駆動できる車輪駆動部42L、42Rと、を備える。
(もっと読む)
芝刈機

【課題】境界検出手段を支持するための支持構造を簡単なものにすることが可能でありながら、境界検出手段により既刈り領域と未刈り領域との刈跡境界を精度よく検出することが可能となる芝刈機を提供する。
【解決手段】走行駆動装置11R,11Lにより直進並びに旋回走行自在に走行駆動される走行機体の走行に伴って芝を刈り取るモーア4と、既刈り領域と未刈り領域との刈跡境界を検出する境界検出手段Qと、境界検出手段Qの検出情報に基づいて走行用の所定の制御を実行する制御手段とを備え、境界検出手段Qが、モーア4の刈刃ハウジング7における前側縦壁部7B1の前面にて芝の存否を検出するように構成されている。
(もっと読む)
防除作業機
【課題】圃場に散布される薬剤のばらつきを抑制すること。
【解決手段】圃場に薬剤を散布する防除作業機は、GPS衛星から送信される電波を受信するGPS受信部10と、GPS受信部10から得られる防除作業機の進行方向における位置情報と、前記薬剤の散布幅とに基づいて、防除作業機が旋回した後に圃場の薬剤を散布する領域へ進入する進入位置を求める制御用プロセッサ40を含む制御装置9と、進入位置を表示する表示部11Dと、を含む。
(もっと読む)
自動芝刈り機
【課題】走行路面に柔軟に対応して傾斜地形のカッティングも可能な自動芝刈り機を提供する。
【解決手段】本発明は、少なくとも位置検出手段を含む各種センサとモータ制御の駆動輪とを有し、学習機能を担う制御ユニットを備えた自律走行型の自動芝刈り機であって、制御ユニットは、センサの情報を基に駆動輪を制御して目標地点に移動させるためのドラム制御部と、走行路面の傾斜に応じて車軸を動かし車体の平衡を保つ車体平衡部と、走行路面に沿ってカッティングユニットを追従させて芝刈りを行うカッティング部と、センサの情報を基に各ユニットを制御するための各種演算及び該演算に対応する処理を行う演算処理部と、を有する。
(もっと読む)
自動耕作方法、及び自動耕作システム
【課題】農地における農作業を効率よく簡便に行えるようにする。
【解決手段】隣接配置された複数のアンテナを備える基地局200を農地4の近傍に設け、アンテナの夫々から無線信号を送信し、農機300に、情報処理装置と、アンテナの夫々から送信される無線信号の位相差に基づき自身の現在位置を標定する位置標定装置411とを設け、サーバ装置100に、農機300による農作業の対象となる農地4について、農機300が、直進走行、農地4の境界近傍での180°方向転換、及び当該方向転換前の当該経路から所定の間隔をあけての直進走行の再開、を順に繰り返し行うようにコースを生成し、生成したコースを農機300に送信し、農機300が、位置標定装置によって標定される現在位置と受信したコースとに基づきコースに沿って自律走行するようにする。
(もっと読む)
水田における雑草の発生防止用ロボット
【課題】稲作において農薬等を使用せずに栽培する場合の水田内の雑草の発生防止、除去に要する労力を如何にして軽減するか。
【解決手段】雑草の発生防止用攪拌機を装備した小型のエアーボートをコンピュータで制御し、障害物(稲)を避けて水田内を自由に、くまなく移動することによって、雑草の発生を防止する。障害物(稲)の認識には、CCDを使用した画像認識または、レーダーのような電波探知機を使用する。水田内をくまなく移動する為に、障害物(稲)の情報にジャイロセンサーからの位置情報を付加したデータをメモリー上にマップとして記録し、走行箇所、未走行箇所を判別する。作業時間の短縮には、複数のロボットを稼働させ、お互いが無線LANで情報を共有することにより、作業を分担する。
(もっと読む)
遠隔操作式農業用トラクター
【課題】本発明は、実際に農圃でトラクターに搭乗せずとも、離れた場所からトラクターを遠隔操作することによって、快適かつ安全に作業をすることができ、また、トラクターの過去の運転状態を記憶させることによって、同じ農圃であれば、無人で自動的に反復して農作業をすることができる遠隔操作式トラクターを提供するものである。
【解決手段】エンジンを動力とする走行装置と、前記エンジン駆動により作業機に回転動力を伝達する装置と、前記作業機を牽引しかつ昇降できる作業機用昇降機と、を有する農業用トラクターにおいて、前記農業用トラクターと離れた位置にある遠隔送信機の操作信号を受信し、前記操作信号により前記農業用トラクターの走行速度と走行方向と作業機への伝達回転と作業機の昇降とを制御する指令を出す制御装置を有することを特徴とする遠隔操作式農業用トラクター。
(もっと読む)
水田除草ロボット
【課題】条間、株間を自由に移動し、且つ、安定した除草効果が得られる除草ロボットを提供する。
【解決手段】水田除草ロボット1は、水田の稲株が通過可能な逆凹状の空間を有したメインフレーム10は、その下部に、車輪19A,19B、車輪19A,19Bを回転駆動する駆動部11A,11B、車輪19A,19Bの前後に配置されて水田除草ロボット1に浮力を生じさせる第1のフロート20A〜20D、全部に設けられて水田内の稲株を検知するセンサレバー23A,23B、メインフレーム10に搭載されたセンサ類に基づいて駆動部11A,11Bを駆動し、車輪19A,19Bの回転を制御する。これにより、水田除草ロボット1は稲株を避けながら自律走行する。
(もっと読む)
走行散布作業機
【課題】GPS信号に基づき走行散布作業機の位置情報を得て、隣接位置での重複した農作業を行なうことがないようにした走行散布作業機を提供すること。
【解決手段】GPSより得られる位置情報から機体の直進方位と、旋回開始位置から90度旋回して旋回戻し位置(e地点)に達した後、さらに90度旋回して直進する隣接作業方位を求め、肥料噴管からの粉粒体の散布幅を読込み、求めた直進方位と隣接作業方位から両方位間の移動距離d1を算出し、隣接作業方位から隣接作業方位と旋回戻し位置の移動距離d2を算出し、移動距離d1から隣接作業方位と前記旋回戻し位置の間隔を差し引いて前記間隔(移動距離d1−d2)を算出し、旋回開始位置と旋回戻し位置の間隔(移動距離d1−d2)を位置情報に変換して旋回戻し位置を求め、旋回を開始すると粉粒体散布装置を駆動停止させ、隣接作業位置(f地点)に達すると粉粒体肥料散布装置を駆動開始させる。
(もっと読む)
農作業支援用自律走行ロボットにおける走行経路認識装置及び走行経路認識に用いられる防草シート
【課題】金属片を埋設するような手間を要する作業をせず、簡単、安価な構成で感度の高い、農作業支援用自律走行ロボットにおける走行経路認識装置を提供することが課題である。
【解決手段】金属検知センサにより予め定められた経路に沿って設けられた金属体を検出し、金属体に対する位置を算出して進行方向を制御する農作業支援用自律走行ロボットにおける走行経路認識装置おいて、前記金属体を、防草シートにおける幅方向中央部の前記自律走行ロボット走行方向へ織り込んだ第1の金属線とし、前記経路に沿って前記防草シートを敷設することで、金属片を埋設するような手間を要せずに金属体を設けられるようにし、かつ、金属検知センサをブリッジ回路で構成して農作業支援用自律走行ロボット表面に設けた。
(もっと読む)
自律走行苗移植機
【課題】本発明では、野菜苗等のポット苗を自律走行しながら畝に移植する苗移植機で、畝上を走行しながら畝の終端に達すると反転して隣の畝に移動して苗の移植を継続できるようにする自律走行苗移植機を提供することが課題である。
【解決手段】走行機体13の底部に畝Uの上面に接触して畝Uを検出する畝センサ28を設け、該畝センサ28が畝Uの終端を検出するとUターン制御を開始して隣の畝Uに移動すべく制御して自律走行苗移植機を構成した。
(もっと読む)
全自動苗移植システム
【課題】本発明では、野菜苗等を自律走行しながら畝に植え付ける苗移植機で、この苗移植機に搭載した移植苗が無くなると自動で苗トレイを補給しながら移植作業を継続できるようにする全自動苗移植システムを提供することが課題である。
【解決手段】走行機体13の前側或は後側に苗トレイTを受け取る苗補給装置18を設けた自律走行の自動苗移植機1と苗トレイTを多数搭載する自律走行の自動苗搬送機40を設けると共に、これら自動苗移植機1と自動苗搬送機40を制御する統合制御装置55を設け、自動苗移植機1に搭載の苗が無くなるか少なくなると自動苗移植機1と自動苗搬送機40を互いに接近させて前記苗補給装置18で自動苗搬送機40から苗トレイTを受け取り、苗の移植走行を続行すべく前記統合制御装置55で制御した全自動苗移植制御システムとした。
(もっと読む)
農用作業機
【課題】水田などの走行不安定な圃場において安定走行を実現することができる農用作業機を提供する。
【解決手段】
走行検知手段により走行機体の走行状態を検知し、安定制御手段によりその走行状態と予め設定した走行条件とを比較演算し、もし、設定条件と異なる走行状態である場合、機体を安定制御する信号を走行安定化手段に出力し、その走行安定化手段により機体の走行状態を安定化させるので、水田などの走行不安定な圃場において、スタックなどに陥ることなく安定走行を実現することができる。
(もっと読む)
農用作業車
【課題】自律走行を行う農用作業車において、オペレータが現在の機体位置の情報(即ち、機体位置が目標経路または目標方向に合致しているか否か、または、目標経路と合致していない場合には機体のズレ方向)を容易に知ることができる技術を提供する。
【解決手段】目標経路の生成後において、該目標経路に対する田植機1の機体位置の変位方向を表示し、かつ、田植機1が自律走行可能か否かを表示する自律走行位置表示ランプ45を具備する構成とする。
(もっと読む)
自動車を操縦するための方法および配置
走行方向で自動車(1)前方にある地面から画像情報が把握され、これらの画像情報から走行方向および/または走行速度を変化させるための操縦命令が作り出される自動車を操縦するための方法を用いて、農業用自動車の画像情報に基づき、目立つ対象構造(3)が選択され、繰り返し自動車(1)と目立つ対象構造(3)との間の距離(a)が求められ、操縦命令が、対象構造に対応する画像情報から、および自動車と対象構造との間の距離変化から、作り出される自動車を操縦する方法。 (もっと読む)
自動収穫ロボット用車両
【課題】 農作業を自動で担うために狭く段差などのある圃場内の無限軌道を快適に走行して効率よく旋回することが可能な自動収穫ロボット用車両を提供すること。
【解決手段】 圃場における農作業を自動で担うため、該圃場内の無限軌道を走行する自動収穫ロボット用車両であって、前車軸に装着されたタイヤ付ホイール型の操向可能な前輪と、後車軸に設けられて独立に駆動制御可能な左右一対のクローラ走行装置とを備え、該クローラ走行装置は、少なくとも、駆動力を有する駆動輪と、該駆動輪の回転に従動する従動輪と、該駆動輪及び従動輪に巻回される無端状クローラとからなり、上方の車両本体部に対して略垂直方向の回転軸によって水平方向に回転自在に連結されていることを特徴とする自動収穫ロボット用車両とする。
(もっと読む)
複数条植え移植機及び複数条植え移植機による植付け方法
【課題】畦クラッチ等による煩雑な植付け条調整操作および植付け条別苗量管理による煩雑な苗補給を要することなく、植付け作業能率の向上とともに機体構成の簡易化を可能とする複数条植え移植機および同複数条植え移植機による植付方法を提供する。
【解決手段】複数条植え移植機は、往復植付け行程による植付け範囲の圃場幅Bをその一側端から所定の植付け条間寸法で且つ所定の植付け条数で複数条植え走行するように構成され、上記圃場幅Bを認識する認識手段と、該認識手段で認識する圃場幅Bを往復植付け行程の行程間ピッチDを前記所定の植付け条間寸法として等間隔に往復植付けするものとした場合に生じる植付け条数に満たない未植付け部分の幅に基づいて、前記圃場幅B全体を植付け条数の整数倍の条数で植付けできるように往復植付け行程の行程間ピッチDを演算する演算手段とを設けたものである。
(もっと読む)
作業車輌の遠隔操作システム
【課題】携帯電話機の局番に対応させて設定した作業車輌しか遠隔操作できないものとして、混信による作業車輌の暴走を防いで安全性を向上させると共に、作業車輌の盗難を防ぐ。
【解決手段】携帯電話機40と作業車輌A側の制御装置とを電話回線または電話回線とインターネットとを介して接続可能に構成すると共に、該携帯電話40の操作に基づいて作業車輌A側の制御装置から走行変速装置又は操向制御装置又はエンジン制御部又は作業装置昇降制御部へ出力するように構成する。
(もっと読む)
農作業支援機器のための農業用資材と該農業用資材を用いた農地、並びに該農地における農作業支援機器の進行方向認識方法
【課題】各種農作業を支援する機器が、農作業に従事する人に何ら負担を掛けることなく、農地に作られた畝に添って正確に自律走行し、生育した作物の収穫作業支援や農薬散布など、各種農作業を確実に支援できるようにする、農作業支援機器のための農業用資材と該農業用資材を用いた農地、並びに該農地における農作業支援機器の進行方向認識方法を提供することが課題である。
【解決手段】農地に作られた畝を覆うマルチフィルムの、埋設位置内側の長手方向に畝位置認識用の線を設け、農作業支援機器がその畝位置認識用の線を認識することで農地に作られた畝に添って正確に自律走行できるようにした。
(もっと読む)
除草ロボット
【課題】簡易且つ経済的に水田雑草の防除を可能とする、除草用の自走ロボットを提供する。
【解決手段】ボディと、ボディの左右に設けられた駆動装置と、ボディの前方中央及び左右に設けられたセンサーと、水田表層土の撹拌装置とを備え、障害物を避けて走行し、表層土を撹拌することを特徴とする水田除草ロボットであり、前記撹拌装置は、クランクの揺動により上下前後に振動する撹拌ブレードからなる撹拌装置、回転軸に取り付けられた回転する撹拌ブレードからなる撹拌装置、又は回転軸に取り付けられた回転する弾性を有する撹拌ブレードと反発発生固定棒とからなる撹拌装置のいずれか一つ以上を用いることが好ましい。
(もっと読む)
1 - 20 / 32
[ Back to top ]