
Fターム[2B043BB01]の内容
農業機械一般(操向) (6,001) | 農業機械の作業別の種類 (591) | トラクタ (77)
Fターム[2B043BB01]に分類される特許
1 - 20 / 77
走行車両
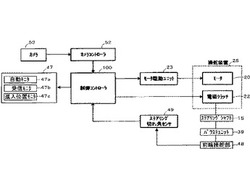
【課題】旋回後の進入位置合わせを行える自動走行制御機能を備えた農業用の走行車両を提供すること。
【解決手段】ステアリングハンドルに連動して正転と逆転をするステアリングシャフト15の切れ角を検出する切れ角センサ49と該シャフト15に回転駆動力を伝達するための正逆転モータ20とモータ20の回転駆動力をシャフト15に伝達するための電磁クラッチ22を有する連動機構を備えた自動操舵装置25とカメラ53で圃場内の遠目標X及び/又は作業軌跡Tを検出してモニタ47に表示可能とし、自動スイッチの「入」操作時時に、前記切れ角センサ49が所定量のシャフト切れ角を検出して車両の旋回が行われたと判断されると、モニタ47で表示される旋回後の遠目標Xの位置情報及び/又は作業軌跡Tの位置情報に基づき自動操舵装置25のモータ20を作動させて圃場内で直進走行の自動操舵を行う制御構成を有する制御装置100を備えた走行車両である。
(もっと読む)
作業車両

【課題】本発明の課題は、パワステコントローラをエンジンとミッションケースの合わせ部近傍に配置し、且つ、車両左側部のスタータセルモータとエキゾーストマニホールドとの略中間部に配置することによって、パワステコントロールとステアリングハンドル間の距離を短縮し、且つ、ステアリングシャフトのジョイント部の折れ点を少なくして操作性の向上を図る。
【解決手段】ステアリングハンドル6の操作でパワステを介して左右の前輪4,4を操向制御するパワステコントローラ16をエンジンEとミッションケース3の合わせ部近傍で車両の左側に位置するスタータセルモータ12とエキゾーストマニホールド13の上下方向中間部に配置してあることを特徴とする作業車両とする。
(もっと読む)
田植機のステアリングコラム
【課題】ステアリングシャフトとトルクジェネレータの連結部の錆付きを防ぐとともに、グリス注入を容易として作業性を向上させた田植機を提供する。
【解決手段】ステアリングハンドル軸53,55にステアリングコラム56を覆設したステアリングシャフト52の下端を、トルクジェネレータ58に連結部57を介して連結し、連結部57では、カラー59を装着したステアリングシャフト52の下端部を、取付フランジ61を介してトルクジェネレータ58に支持させ、カラー59は、トルクジェネレータ58の上面に接する底部周面に、開口部60を形成するとともに、取付フランジ61の底部にも開口部60と連通する開口部63を形成したものである。加えて、カラー側開口部60と、取付フランジ側開口部63のそれぞれを組立てることによって、ラビリンス形状Lを構成した。
(もっと読む)
作業車の車体状態切り換え構造
【課題】車体の状態を第1状態から第2状態に切り換える際の判断基準に創意工夫を凝らすことにより、作業走行時において車体の状態が不測に第1状態から第2状態に切り換わる誤作動の発生を抑制し、その誤作動に起因した不都合の発生を抑制する。
【解決手段】操舵輪の直進位置からの切れ角を検出する切角センサ55と、この切角センサ55の検出に基づいて車体の状態を切り換える車体状態切換手段48とを備えた作業車の車体状態切り換え構造において、車体の走行速度を検出する車速センサ56を備え、車体状態切換手段48が、切角センサ55の検出、および、車速センサ56の検出に基づいて、車体の旋回角度を算出し、かつ、算出した旋回角度が設定角度を超えると、車体の状態を車体に連結した作業装置を機能させる作業用の第1状態から作業装置を機能させない移動用の第2状態に切り換えるように構成した。
(もっと読む)
農用作業車
【課題】防除散布装置及び薬液タンクを備えた農用作業車において、薬液タンクを搭載したままでリヤアクスルケースのオイル交換をできるようにする。
【解決手段】防除散布装置11及び薬液タンク9を備えた農用作業車において、走行車体2の後側部には後輪への伝動装置を内装しているリヤアクスルケース36を左右方向に沿わせて配設し、リヤアクスルケース36の左右両側部に左右後輪ファイナルケース41,41を取り付け、左右後輪ファイナルケース41,41の下端部に左右後輪4,4を支架する。リヤアクスルケース36の左右外側端部のいずれか一方に給油口43を設けるにあたり、走行車体2の後部に搭載している薬液タンク9よりも平面視で左右外側に突出している部位に給油口43を設ける。
(もっと読む)
自動耕作方法、及び自動耕作システム
【課題】農地における農作業を効率よく簡便に行えるようにする。
【解決手段】隣接配置された複数のアンテナを備える基地局200を農地4の近傍に設け、アンテナの夫々から無線信号を送信し、農機300に、情報処理装置と、アンテナの夫々から送信される無線信号の位相差に基づき自身の現在位置を標定する位置標定装置411とを設け、サーバ装置100に、農機300による農作業の対象となる農地4について、農機300が、直進走行、農地4の境界近傍での180°方向転換、及び当該方向転換前の当該経路から所定の間隔をあけての直進走行の再開、を順に繰り返し行うようにコースを生成し、生成したコースを農機300に送信し、農機300が、位置標定装置によって標定される現在位置と受信したコースとに基づきコースに沿って自律走行するようにする。
(もっと読む)
遠隔操作式農業用トラクター
【課題】本発明は、実際に農圃でトラクターに搭乗せずとも、離れた場所からトラクターを遠隔操作することによって、快適かつ安全に作業をすることができ、また、トラクターの過去の運転状態を記憶させることによって、同じ農圃であれば、無人で自動的に反復して農作業をすることができる遠隔操作式トラクターを提供するものである。
【解決手段】エンジンを動力とする走行装置と、前記エンジン駆動により作業機に回転動力を伝達する装置と、前記作業機を牽引しかつ昇降できる作業機用昇降機と、を有する農業用トラクターにおいて、前記農業用トラクターと離れた位置にある遠隔送信機の操作信号を受信し、前記操作信号により前記農業用トラクターの走行速度と走行方向と作業機への伝達回転と作業機の昇降とを制御する指令を出す制御装置を有することを特徴とする遠隔操作式農業用トラクター。
(もっと読む)
自走式車両
【課題】泥などが蓄積しない保護部によってパワーステアリング機構を保護することのできる自走式車両を提供する。
【解決手段】ハンドル21の操作によって左右の前輪15の方向を同時に変更するパワーステアリング機構psを有し、そのパワーステアリング機構psを介して左右のそれぞれの前輪15の方向を変更するトラクタ10において、走行時に、パワーステアリング機構psを障害物から保護するための保護棒71をシャーシ(車体フレーム)14に取り付けるとともに、保護棒71をパワーステアリング機構psの前方に、かつ、そのパワーステアリング機構psに沿って設ける。
(もっと読む)
乗用型対地作業車両
【課題】乗用型対地作業車両において、車両が傾斜面上を走行する場合でも、運転者が意図する方向への走行を可能とし、さらに、ヨーレートの検出値と目標値との偏差に基づく制御作用時の車両の挙動特性を自由に設定しやすくすることである。
【解決手段】乗用型対地作業車両である芝刈車両10は、コントローラ48と、車両のヨーレートを検出するヨーレートセンサ60とを備える。コントローラ48は、運転者により入力される加速指示及び旋回指示に基づいて左右車輪用電動モータ22,24それぞれの2の目標回転速度指令値を算出し、目標ヨーレートとヨーレート検出値との偏差に基づいて、車輪用電動モータ22,24にそれぞれ関係する2の補正係数を取得し、2の目標回転速度指令値のそれぞれを2の補正係数により補正して、車輪用電動モータ22,24の駆動を制御する。
(もっと読む)
移動農機の走行油圧制御装置
【課題】本発明では、第一油圧ポンプからの圧油を操舵回路へ送ると共に、各走行用クラッチの油圧シリンダ作動用の圧油として使用することで、回路構成を分かり易く単純にすることを課題とする。
【解決手段】走行用油圧ポンプ66の圧油を操舵回路67に送り、減圧回路95を介して各走行用クラッチ101,102,103,107の油圧シリンダ作動用の圧油として使用し、さらに、前記減圧回路95の圧力調整戻り油路80の油を前記走行用クラッチ101,102,103,107の潤滑油として利用するように構成したことを特徴とする移動農機の走行油圧制御装置の構成とする。また、戻り油路80における各走行用クラッチ101,102,103,107の潤滑供給部において、各絞り89,92,93と低圧リリーフ弁94を設けたことを特徴とする移動農機の走行油圧制御装置の構成とする。
(もっと読む)
農業機械(Aトラクター)と耕作機械の間を無線で遠隔操作をし、その動作リモコンは、自己発電自己蓄電をするワイヤーレス及びワイヤーレスリモコンであって、耕作機械においても動作電源は、自己発電自己蓄電をし、かつワイヤーレス及びコネクターレスにした装置。
【課題】
農業機械(トラクター)と耕作機械の間をケーブルレスとコネクターレスにして、かつ動作リモコンも同様にワイヤーレス、コネクターレスにしたことを提供する。
【解決手段】
動作リモコンの電源は、4−1ソーラーパネルやバイモルフモジュールから形成されて自己発電自己蓄電する1−1蓄電部と1−a操作部からの命令信号を1−2CPU部で処理をして1−iアンテナ部から1−k電波として飛ばし、B耕作機械へ取り付けられた3制御体の3−aアンテナ部へ送り、3−1RFモジュール部が3−3制御部へ命令信号に変換して、3−4耕作機械の駆動部を動作させる。
必要な電源は3−2蓄電部で自己発電自己蓄電を行い、電源を必要とする各ブロックや電子部品、電気部品に供給することによって、Aトラクター本体とB耕作機械との間をケーブルレスやコネクターレスに実現して、4制御体本体の4−4バッテリーの交換やメンテナンスフリーを実現したのである。
(もっと読む)
移動農機
【課題】簡素な構成によって直進性を確保することを可能にした油圧式無段変速装置を備えた移動農機を提供する。
【解決手段】クローラトラクタは、ステアリングホイールが中立位置にされると、斜板式可変容量ポンプ37rの前進側斜板操作ポート37raと斜板式可変容量ポンプ37lの前進側斜板操作ポート37la、斜板式可変容量ポンプ37rの後進側斜板操作ポート37rbと斜板式可変容量ポンプ37lの後進側斜板操作ポート37lbをそれぞれ連通するバイパスバルブ35を備えている。これにより、左右の斜板式可変容量ポンプ37r,37lに入力される制御圧が等しくなるので、直進性を確保することができる。
(もっと読む)
歩行型車両
【課題】コストの上昇を抑制しつつ急旋回を防止して狙いとする旋回ラインが容易に得られる歩行型車両を提供する。
【解決手段】
車両1が所定速度以上で走行している際に、旋回操作子33が左方又は右方に旋回操作されたとき、該車両1を減速させる旋回時減速機構55を備えた。
(もっと読む)
作業車両
【課題】ステアリングハンドルのチルト操作を容易にできるとともに、前後進切換機構の誤操作や損傷を防止する、操作性を向上させた作業車両を提供する。
【解決手段】ダッシュボード9の後方に配設し、上方にステアリングハンドル11を突設させた、機体前後方向にチルト可能なステアリングコラム12と、このステアリングコラム12の一側部に設けた、機体の前後進の切換操作を行うリバーサレバー21と、このリバーサレバー21に連係する、ステアリングコラム12の下方に位置するミッションケース8の前部に内設した前後進切換機構32とを備え、リバーサレバー21は、ミッションケース8後部の一側部に設けた中継レバー28に、リンク部材27を介して連結するとともに、中継レバー28は、ミッションケース8前部の一側部に設けた前後進切換機構32の操作レバー33にロッド31を介して連結する。
(もっと読む)
走行制御装置
【課題】車両が目標ランプに向かって自動的に走行するように制御する走行制御装置を提供する。
【解決手段】走行制御装置において、カメラは、車両走行の目標となる方向に位置する目標ランプを撮像する。画像処理部32は、カメラにより撮像した撮像画像を処理する。走行制御部36は、撮像画像に含まれる目標部画像の位置と車両の初期位置との関係で定まる目標走行ラインを走行するように車両の走行を制御する。ヨー角検出部42は、撮像画像から目標部に対する車両のヨー角を検出する。横偏差算出部50は、撮像画像から目標走行ラインからの横偏差を算出する。走行制御部36は、ヨー角および横偏差にもとづいて車両の走行を制御する。
(もっと読む)
作業車両
【課題】ステアリングハンドルをチルトさせても、ハンドアクセルレバーなどの操作部材の損傷防止および正確な操作を可能とした、操作性、生産性およびメンテナンス性を向上させた作業車両を提供する。
【解決手段】ボンネット5の後部に連設したダッシュボード9の後方に、上方にステアリングハンドル11を突設し、チルト可能に取付けたステアリングコラム12およびエンジン6の回転数を設定するハンドアクセル操作部材24を備え、ステアリングコラム12は、ダッシュボード9の後部に取付けたステアリングケース22に、チルト可能に取付けるとともに、ハンドアクセル操作部材24は、ステアリングケース22の一側部に設ける。
(もっと読む)
作業車両
【課題】作業効率性と作業の均一化に優れた旋回を行う作業車両を提供する。
【解決手段】直進方向を基準として、前記操向ハンドル7の回動角度を検出する角度検知手段51と、作業速度と旋回速度の制御の開始および/または終了の基準となる前記操向ハンドル7の回動角度の閾値Aを設定する角度閾値設定手段61と、前記回動角度の閾値A以上に前記操向ハンドル7が位置する場合の設定旋回車速Vを設定する旋回車速設定手段62と、前記油圧式無段変速装置23の変速アクチュエータ24と、制御手段81とを備え、前記制御手段81は、前記角度検知手段51による検出値が前記回動角度の閾値A以上になると、前記設定旋回車速Vとなるように前記変速アクチュエータ24を作動させ、前記角度検知手段51による検出値が前記回動角度の閾値A未満の場合、前記作業速度になるよう前記変速アクチュエータ24を制御するように構成した。
(もっと読む)
旋回連動制御式の作業車両
【課題】圃場の状況や走行の状況その他の変動によって対地作業装置の再稼動前に、機体の旋回位置の修正等の異常対応操作が必要なとなった場合に、オートダウン制御の解除等の煩わしい操作を強いられることなく、異常状況の対応が可能となる旋回連動制御式の作業車両を提供する。
【解決手段】旋回連動制御式の作業車両は、作業用高さと旋回用高さに切替え可能に装荷した対地作業装置(R)と、この対地作業装置(R)について機体の旋回開始と対応して旋回用高さに切替えるオートリフト制御および旋回終了と対応して作業用高さに切替えるオートダウン制御を行う制御部(21)とを備えて構成され、上記制御部(21)は、旋回開始後における機体の位置が対地作業の所定の開始位置の範囲内であって、同じく機体の走行車速が所定速度以上である場合に限り、上記オートダウン制御を実施するものである。
(もっと読む)
トラクタの操舵装置
【課題】構成を簡素化し、メンテナンスの容易なトラクタの前輪操舵装置を提供する。
【解決手段】フロントアクスルケース16の左右両側部に左右前輪を支架している左右前輪ケース17を操舵回動可能に設け、走行車体の前側部左右一側に前輪操舵シリンダ19を前後方向に沿わせて配置し、前記前輪操舵シリンダ19の後側から突出しているシリンダロッドの端部を走行車体から延出しているシリンダブラケット19dで支持し、前輪操舵シリンダ19の前側から突出しているシリンダロッドの端部を左右一側の前輪ケース17の操舵アームにピン連結し、左右前輪ケース17の左右ナックルアーム17cを前側タイロッド17dにより連動連結し、前記操舵油圧分配器により制御された油圧を前輪操舵シリンダ19の左右ポート19b、19cに給排可能に構成したことを特徴とするトラクタの操舵装置の構成とする。
(もっと読む)
作業機等の油圧制御回路
【課題】油圧制御ブロックを小さなブロックで分離可能にしてメンテナンスの能率を高める。
【解決手段】左側走行装置の駆動と制動を左操向クラッチシリンダ15Lと左走行ブレーキシリンダ18Lで制御し、右側走行装置の駆動と制動を右操向クラッチシリンダ15Rと右走行ブレーキシリンダ18Rで制御する回路であって、左操向クラッチシリンダ15Lと左走行ブレーキシリンダ18Lを制御する左クラッチ切換電磁弁14Lと左パイロット圧切換電磁弁16Lと左電磁比例弁17Lを一体に組み込んだ左油圧制御ブロック35Lと、右操向クラッチシリンダ15Rと右走行ブレーキシリンダ18Rを制御する右クラッチ切換電磁弁14Rと右パイロット圧切換電磁弁16Rと右電磁比例弁17Rを一体に組み込んだ右油圧制御ブロック35Rを各別の回路にする。
(もっと読む)
1 - 20 / 77
[ Back to top ]