
Fターム[2B043DB30]の内容
農業機械一般(操向) (6,001) | 操舵装置の構成、配置又は取付け (462) | その他 (12)
Fターム[2B043DB30]に分類される特許
1 - 12 / 12
自走式車両
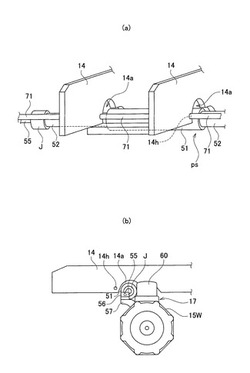
【課題】泥などが蓄積しない保護部によってパワーステアリング機構を保護することのできる自走式車両を提供する。
【解決手段】ハンドル21の操作によって左右の前輪15の方向を同時に変更するパワーステアリング機構psを有し、そのパワーステアリング機構psを介して左右のそれぞれの前輪15の方向を変更するトラクタ10において、走行時に、パワーステアリング機構psを障害物から保護するための保護棒71をシャーシ(車体フレーム)14に取り付けるとともに、保護棒71をパワーステアリング機構psの前方に、かつ、そのパワーステアリング機構psに沿って設ける。
(もっと読む)
作業車

【課題】直接操作又は遠隔操作で走行可能であり、この直接操作と遠隔操作とを作業状況に応じて正確に切り替えて、走行操作の操作性の向上を図ることができる作業車を提供する。
【解決手段】エンジン5の出力を走行装置に伝達する無段変速装置21と、変速ペダル16により無段変速装置21の変速比を変更する変速アクチュエータ60と、変速アクチュエータ60を遠隔操作可能なリモコン91と、リモコン91を保持可能なリモコンホルダ92と、リモコン91がリモコンホルダ92により保持されているかを検知する着脱センサ93と、着脱センサ93によりリモコン91がリモコンホルダ92に保持されていると検知された場合、変速ペダル16による直接操作を優先する制御を行い、着脱センサ93によりリモコン91がリモコンホルダ92に保持されていないと検知された場合、リモコン91による遠隔操作を優先する制御を行う制御装置80を備える田植機1。
(もっと読む)
散布作業車
【課題】本発明の課題は、薬液タンクの後方にサブタンクをトレーラーに搭載して牽引可能に装備し、タンク容量を大幅にアップして、作業能率の向上を図る。しかも、トレーラーは左右の車輪を操向操舵可能に構成することで、旋回時の泥押しを抑制し機体の旋回を円滑にすることを目的とする。
【解決手段】自走しながら圃場の作物に薬液を散布する散布作業車において、車体後部に搭載した薬液タンク5の後方に薬液サブタンク13をトレーラー14に搭載して牽引可能に装備し、トレーラー14の左右車輪15,15を左右方向に操向操舵可能に構成してあることを特徴とする。そして、左右の車輪15,15はアクチュエータ20を介して操向操舵する構成とすると共に、このアクチュエータを駆動操作する操舵スイッチ19は薬液を散布制御する防除コントローラ部12近くに集中配備してあることを特徴とする散布作業車の構成とする。
(もっと読む)
作業車輌の前輪操向装置
【課題】複数の操舵角、操舵方向、及び操舵速度を検出できるものでありながら、簡単な構成とすることが可能な作業車輌の前輪操向装置を提供する。
【解決手段】前輪操向装置20は、大径部45a,45c,45f及び小径部45b,45d,45e,45gを有する軸状カム部材45と、該軸状カム部材45が貫通配置された位置検出シリンダ43と、該位置検出シリンダ43に固定された左検出スイッチ41及び右検出スイッチ42とを有する操舵位置検出装置40を備えて構成されている。軸状カム部材45は、操向操作に基づいて移動し、中立状態から最大操舵角となるまでの間で、左検出スイッチ41及び右検出スイッチ42に操舵角に応じた複数回の状態変化を出力させることにより複数段階の操舵角を検出する。また、これら複数の操舵角間の変位時間から、マイコンが演算することで操舵速度を検出する。
(もっと読む)
車軸駆動装置
【課題】車軸駆動装置のケースは、一対の出力軸、差動機構、モータをともに収納するので、形状が複雑である。また、上下二つのケース半部同士も共通の形状とすることができない。そのため、なおもコスト高になる。
【解決手段】車軸駆動装置10にて、両出力軸4L・4Rを収納するケース70を設け、ケース70は、略同一のケース半部の一対を、互いに上下左右反転した状態で左右に結合してなり、接合した両ケース半部は、それぞれで各出力軸4L・4R及び入力軸162を軸受しており、左右各ケース半部の外側には、それぞれ各モータ21a・22aを装着し、各モータ21a・22aのモータ軸161・160をモータ連結用継手部分に連結した。
(もっと読む)
作業車の走行制御装置
【課題】 GPS位置情報算出手段により求められる車体の位置情報を有効に利用することで、低コストのジャイロ装置を用いてコスト低減を図ることを可能にしながらも、設定経路に沿う操向制御を極力良好に行えるようにする。
【解決手段】 車体の位置情報を求めるGPS位置情報算出手段100、車体の方位変位情報を検出するジャイロ装置57、ジャイロ装置57にて車体の方位変位情報が適正に検出されているジャイロ情報適正状態であるか適正に検出されていないジャイロ情報不適正状態であるかを判別するジャイロ情報判別手段103が備えられ、ジャイロ情報適正状態であることが検出されると、GPS位置情報算出手段100による車体の位置情報及びジャイロ装置57による車体の方位変位情報に基づいて操向制御し、且つ、ジャイロ情報不適正状態であることが検出されると、GPS位置情報算出手段100による車体の位置情報のみに基づいて操向制御する。
(もっと読む)
草刈り機
【課題】草刈り機は他の農業機械に比べ比較的スピードの出せる設定になっており作業時に高速走行した場合、舵取りによっては機体が不安定になり横転の危険性すらある。また移動時であっても不整地走行する場合がほとんどであり高速走行中に急ハンドルが切られた場合非常に危険であった。この舵取りに関わる安全装置として高速走行中の急な進行方向変更や旋回時の速度制限制御を実現する。
【解決手段】HST調整軸を回動調整するロッド、又はワイヤーと、HSTレバー、又はHSTペダルとの連結部の一部に連結部と連動する連結体を連結し、且つその連結体をアクチュエータにより作動させることにより、HSTレバー又はペダルの操作を牽制し、HST調整軸を制御し速度制御できる構成にした。更には、ステアリング機構にステアリングセンサを配設し、ステアリングホイールが略旋回走行方向位置にある時はアクチュエータを作動させる構成にした。
(もっと読む)
作業車両
【課題】操向ハンドル10の回動操作に応じて走行機体を左又は右に旋回させる構成の作業車両において、走行機体の進行方向を修正する際に、操向ハンドル10を細かく切り足したり切り戻したりする手間をなくす。
【解決手段】操向ハンドル10のハンドルホイル部94に、走行機体の進行方向を微調節操作するためのステアリングスイッチ100を備える。ステアリングスイッチ100における左右方向の操作は、操向ハンドル10の回動操作に拘らず、常に許容される構成にする。すなわち、ステアリングスイッチ100と操向ハンドル10とは互いに独立的に操作し得るように構成する。そして、操向ハンドル10の単位操作量に対する走行機体1の旋回動作量は、ステアリングスイッチ100の単位操作量に対する走行機体1の旋回動作量と比べて格段に大きく設定する。
(もっと読む)
自動収穫ロボット用車両
【課題】 農作業を自動で担うために狭く段差などのある圃場内の無限軌道を快適に走行して効率よく旋回することが可能な自動収穫ロボット用車両を提供すること。
【解決手段】 圃場における農作業を自動で担うため、該圃場内の無限軌道を走行する自動収穫ロボット用車両であって、前車軸に装着されたタイヤ付ホイール型の操向可能な前輪と、後車軸に設けられて独立に駆動制御可能な左右一対のクローラ走行装置とを備え、該クローラ走行装置は、少なくとも、駆動力を有する駆動輪と、該駆動輪の回転に従動する従動輪と、該駆動輪及び従動輪に巻回される無端状クローラとからなり、上方の車両本体部に対して略垂直方向の回転軸によって水平方向に回転自在に連結されていることを特徴とする自動収穫ロボット用車両とする。
(もっと読む)
苗移植機
【課題】比較的小さな圃場であっても小回り性能に優れた苗移植機を提供すること。
【解決手段】走行車体1の後側に昇降可能に設けた苗植付部7と旋回時に旋回内側の後輪3の駆動力を切断する左右一対設けたギア伝動系のサイドクラッチ体33を備え、後輪3,3を、車体進行方向に向かって苗植付部7の植付条全条分を跨ぐ左右の位置と該左右位置より内側に一方の後輪3が位置するように左右位置を切替可能に設けた苗移植機であり、車輪トレッドを車体支持のために維持しながら、左右一方の旋回は小回りできる。通常位置より内側に位置させた一方の後輪3を旋回外側とする場合には、内側に位置させていない後輪3のサイドクラッチ体33を切り、さらにサイドブレーキ体35を作動させて旋回させ、内側に位置させた一方の後輪3を旋回内側とする場合には、該内側に位置させた後輪3のサイドクラッチ体33を切り、フリー回転とする旋回をさせる。
(もっと読む)
三輪型管理機
【課題】 運転者の負担を大幅に軽減することができる三輪型管理機を提供することを課題とする。
【解決手段】 前輪が2輪で、後輪が1輪で、この後輪を操舵輪とし、農作業に供する三輪型管理機において、図で、横軸は後輪の操舵角θ、縦軸は(前輪速度/後輪速度)を示す。すなわち、後輪の操舵角に基づいて前輪の回転速度を制御する。
【効果】 操舵角が大きくなるほど、走行速度が遅くなり、転倒の危険を回避することができる。運転者は旋回前に減速操作をする必要がないので、運転操作が楽になり、運転者の負担を大幅に軽減することができる。
(もっと読む)
乗用水田除草機
【課題】田植機を走行機体とし、その後方に除草機を連結した水田除草機では、枕地などでの方向転換時の土の持上げや稲株の踏み潰し、また、作業位置を視認しながら走行できないために、田植機の車輪で稲株条を横切ったり、除草機が適切な配置に位置せずに条間除草用のロータが稲株の条上を通過して、稲株を浮上らせたり埋没したりして損傷していた。
【解決手段】左右の前輪と中央の後輪の3輪式であって、これら前輪と後輪の間に運転席を配置した乗用走行機体に、エンジンと、エンジンの動力を前輪に伝えて駆動する駆動部と、後輪の向きを変更して機体を旋回する操向部とを設け、後輪の位置は、その走行軌跡が走行機体の最小旋回時の旋回外側の前輪と同じになる距離だけ、前輪から離して設置し、さらに前輪の前方に除草部を設け、除草部は機体前部に横架する左右方向の伝動軸を介してエンジンに連結するとともに、この伝動軸を中心に昇降可能にした。
(もっと読む)
1 - 12 / 12
[ Back to top ]