
Fターム[2B043EB27]の内容
農業機械一般(操向) (6,001) | センサの構成、配置又は取付け (441) | センサの調整 (2)
Fターム[2B043EB27]に分類される特許
1 - 2 / 2
作業車両の自動走行制御装置
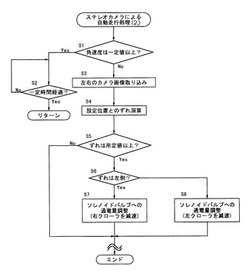
【課題】畝W等の走行基準体に沿ったトラクタの自動走行制御の精度を向上する。
【解決手段】トラクタ1には進行方向前側部を撮像するステレオカメラ33を設け、トラクタ1の走行動力を前後進にわたり無段変速する逆転用クラッチ18L,18R及び正転用クラッチ19L,19Rを設ける。ステレオカメラ33により畔等の走行基準体を撮像しながら走行し、走行基準体とトラクタとの検出間隔が所定間隔からずれると、所定間隔に復帰するように正転用クラッチ19L,19Rを作動して操舵制御する。またトラクタ1が所定値以上の加速度を検出すると、所定時間にわたり操舵制御を停止する。
(もっと読む)
作業車の画像処理装置

【課題】 列状に並んだ物体を撮影して線分を設定する作業車の画像処理装置において、物体の色相に近い色相を備えた外乱の影響をできるだけ小さくする。
【解決手段】 物体の並び方向と交差する複数の分割線E1により、画像を複数の領域B1に分割する。領域B1の各々において、物体の色相を備えた画素を候補画素として抽出する。領域B1の各々において、複数の候補画素のうち、最上位から所定個数の候補画素G1,G2,G3,G4を選択する。選択された所定個数の候補画素G1,G2,G3,G4に沿って線分を設定する。
(もっと読む)
1 - 2 / 2
[ Back to top ]