
Fターム[2B043EE02]の内容
農業機械一般(操向) (6,001) | 報知装置の構成、配置又は取付け (86) | 警報装置 (17)
Fターム[2B043EE02]に分類される特許
1 - 17 / 17
乗用型苗移植機
【課題】 乗用型苗移植機において、旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性の点において課題があった。
【解決手段】 苗移植作業装置を上昇させると共に走行距離算出手段にて走行距離の算出を開始し、該走行距離に応じて、先ず苗移植作業装置が下降する指令を出力し、その後、前記走行距離に応じて、線引きマーカ(195)が下降する指令を出力する制御装置(170)を設けた。
(もっと読む)
乗用型苗移植機

【課題】 乗用型苗移植機において、旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性の点において課題があった。
【解決手段】 ステアリングハンドルにて操向操作される左右前輪と、左右後輪を設けた走行車両に、苗移植作業装置を昇降自在に装着した乗用型苗移植機において、走行距離算出手段にて苗移植作業装置を上昇させる指令を出力してからの走行距離を算出して、該走行距離に応じて制御することにより、先ず苗移植作業装置が下降する指令を出力し、その後に線引きマーカを下降させる自動旋回モードを設けた。
(もっと読む)
乗用型田植機
【課題】植付部が自動的に昇降する際の安全性を向上させた乗用型田植機を提供する。
【解決手段】乗用型田植機は、車体と、報知部と、植付部と、植付部を上下に昇降するための昇降シリンダと、昇降シリンダの駆動を制御する制御部と、を備える。そして、前記制御部は、植付部を自動的に昇降させる制御を開始するトリガを検出した場合、前記報知部によって植付部の自動昇降を報知した後、昇降シリンダを駆動して植付部を昇降させる。
(もっと読む)
農業用作業車両
【課題】簡単な構成で旋回操作の開始及び終了を検出することが可能な農業用作業車両を提供する。
【解決手段】サイドクラッチ操作機構45は、ステアリングハンドル7が所定の操作量以上操作された場合に、サイドクラッチを切断する。クラッチセンサ49L,49Rは、サイドクラッチの作動状況を検出可能である。制御部は、植付部を昇降駆動するための昇降シリンダの駆動を制御する。植付クラッチは、植付部に対する駆動力の伝達の有無を切換可能である。また、前記制御部は、植付部の作動中において、植付クラッチの切断、サイドクラッチの切断、及び後進操作を、旋回時自動昇降制御の開始トリガとして検出可能である。そして、前記制御部は、開始トリガのうち何れか1つを検出すると、植付部を上昇させ、その後、前記サイドクラッチの接続を検出すると、植付部を下降させる。
(もっと読む)
コンバイン
【課題】穀稈の状況に応じた適切な進路を把握でき、刈取作業が行いやすくなるコンバインを提供する。
【解決手段】走行部2と、前記走行部2の前方に配置される刈取部3と、前記刈取部3の後方で前記走行部2の前部上に配置される運転部8とを備えるコンバイン1であって、前記運転部の前方を撮影する第一撮影手段12と、前記第一撮影手段12により撮影された映像を表示する表示装置85と、前記運転部8の操向操作手段(ハンドル82)の操作量に基づいて予測進路軌跡Bを作成する制御装置97とを備え、前記制御装置97は、前記予測進路軌跡Bを前記第一撮影手段12により撮影された映像に重畳させ、この予測進路軌跡Bが重畳された映像を前記表示装置85に表示させる。
(もっと読む)
田植機
【課題】 圃場の往復作業走行の折返し部に来た際に、植付部の取扱いを要することなく機体を旋回することができるとともに、一連の動作を継続することが可能となる田植機を提供することにある。
【解決手段】 旋回操作の検出に応じて圃場を旋回走行しうる機体と、この機体に対して昇降可能に支持されてその作業位置まで下降して植付作業をする植付部と、この植付部の上昇、下降、植付稼動、植付停止の各動作を制御する制御部とを備えた田植機において、上記制御部は、畦際まで前進して停車し、植付部を非作業位置に上昇し、後退して旋回するバック旋回時に、機体走行中の旋回操作の検出に応じて作業位置への下降、植付稼動までの一連の動作を制御する旋回連動制御を行う構成とした。
(もっと読む)
乗用型苗植機
【課題】 適切な位置で苗の植え付けができる制御装置を備えた乗用型苗植機を提供すること。
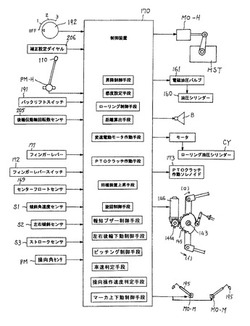
【解決手段】 エンジンからの動力が伝達される伝動装置と、該伝動装置からの出力で駆動する左右の後輪と、該後輪への伝動を入り切りするサイドクラッチと、昇降自在の苗植付部と、走行距離を検出する走行距離検出センサと、操向操作用のハンドルを走行車体に設け、ハンドルの操作角度が所定値以上になると走行距離検出センサにより走行距離の検出を開始し、該走行距離が設定距離に達すると報知する報知装置を設けたことを特徴とする乗用型苗植機とした。
(もっと読む)
作業車両の操縦装置
【課題】操向レバーの旋回操作を制御装置に入力するポジションセンサの故障をいち早く検出して警報を出したり旋回を中止することで安全性を高める。
【解決手段】操向レバー(1)の左右傾倒角度を検出するポジションセンサ(2)と、該ポジションセンサ(2)とは別に操向レバー(1)の左右傾倒状態を検出する左右の旋回スイッチ(3a,3b)を設け、前記ポジションセンサ(2)と旋回スイッチ(3a,3b)の検出値が一致しない場合を故障と判断し、警報或いは走行停止を実行する構成とした。
(もっと読む)
田植機
【課題】 本発明の課題は、機体旋回後の農作業装置の取扱いを可能な範囲で旋回動作と連動して自動処理することにより、オペレータの負荷を最小限度に抑えることができる自動植付作業車用制御装置を提供する点にある。
【解決手段】 操舵ハンドルとオペレータシートを備え、転向車輪と後輪の4輪で駆動する構成とし、機体後部に昇降部を介して昇降可能に植付部を設けた田植機において、旋回時のハンドル操作又は植付部の上昇に基づいてドライブシャフト回転のカウントを開始し、該カウントが第一の所定値になるのに起因して、植付部を下降し、前記カウントが第二の所定値になるのに起因して、植付クラッチを入にする連動制御を備え、機体の後進をマイナスして後進を累積して前記カウントをカウントする制御装置を設けた。
(もっと読む)
農薬散布用ホバークラフト
【課題】特別なテクニックを要せずに、ラダーの向きを変え推進力を加えることで容易に離岸することができる農薬散布用ホバークラフトを提供する。
【解決手段】ホバークラフト本体5と、進行方向と進行速度の他、種々の設定を所望に遠隔制御する無線信号を送信すると共に、CCDカメラ12によって映し出される船艇前方の映像信号を受信しモニタ31に現出する他、畦道や土手等の障害物に対する接近状態を感知した際、超音波センサー装置11が送信する警告信号を受信し、スピーカー30から警告音を発生させるコントローラ26の組み合わせから構成されており、農薬散布用ホバークラフト1は、ホバークラフト本体5の船首6近傍上甲板及び船尾7近傍上甲板に設けられた固定具17間にグラスファィバー製の離岸ロッド16が右舷8縁及び左舷9縁より側方に円弧状膨出して張架されていることに特徴する。
(もっと読む)
作業車の走行制御装置
【課題】 GPS位置情報算出手段により求められる車体の位置情報を有効に利用することで、低コストのジャイロ装置を用いてコスト低減を図ることを可能にしながらも、設定経路に沿う操向制御を極力良好に行えるようにする。
【解決手段】 車体の位置情報を求めるGPS位置情報算出手段100、車体の方位変位情報を検出するジャイロ装置57、ジャイロ装置57にて車体の方位変位情報が適正に検出されているジャイロ情報適正状態であるか適正に検出されていないジャイロ情報不適正状態であるかを判別するジャイロ情報判別手段103が備えられ、ジャイロ情報適正状態であることが検出されると、GPS位置情報算出手段100による車体の位置情報及びジャイロ装置57による車体の方位変位情報に基づいて操向制御し、且つ、ジャイロ情報不適正状態であることが検出されると、GPS位置情報算出手段100による車体の位置情報のみに基づいて操向制御する。
(もっと読む)
田植機
【課題】 次回の走行指標を田面に形成するマーカを機体横方向に突出した作用姿勢と機体側に後退した格納姿勢とに切換え可能に装備した田植機において、マーカを畦などの障害物に不用意にぶつけてしまうことを未然に回避できるようにする。
【解決手段】 走行機体3が障害物Bに接近することを検知する検知手段38を備え、障害物Bへの設定以上の接近が検知されると作用姿勢のマーカ12を自動的に格納姿勢に切換えるマーカ自動切換え手段を備えてある。
(もっと読む)
作業車両
【課題】暗夜や積雪時などで障害物が視認できないときに車体の走行位置をGPS受信装置で受信して、障害物判断処理を実行する制御手段を具備した作業車両を提供する。
【解決手段】地図情報を格納するデータベースD1と、前記地図情報に基づく作業機の位置検出手段及び位置表示手段とを有する作業車両において、作業車両の走行時に、現在の走行位置と、データベースD1に格納された障害物地図情報と比較し、障害物が近づくと警報を発する。また、前記警報時に、障害物の種類と位置を表示する。
(もっと読む)
農用作業車
【課題】自律的に直進走行する農用作業車において、次工程への遷移時に走行経路の位置決めが容易にでき、かつ、目標経路と実際の走行経路を略一致させることができる技術を提供する。
【解決手段】GPSユニット102と処理部110を備え、GPSユニット102により計測される位置情報に基づいて処理部110によりティーチング経路を生成し、該ティーチング経路に沿って自律走行させるようにした田植機1において、ティーチング開始点(点A)とティーチング終了点(点B)をGPSユニット102により計測し、処理部110により、点Aと点Bを結ぶ直線状のティーチング経路(線分AB)を生成し、かつ、線分ABと、車体に装着した植付部4において設定する作業幅(即ち、植付幅aに植付条数bを乗じた距離)を基準として、線分ABに対して平行で、作業幅だけ離間したN本の直線状の目標経路を生成する。
(もっと読む)
作業車両
【課題】走行機体に搭載されたエンジンの動力を、油圧式駆動装置を介して左右の走行クローラに伝達するように構成する一方、走行機体の進行方向を変更操作するための操向ハンドルを備える作業車両において、不要であるにも拘らず、操向ハンドルの切り過ぎにて走行機体をスピンターンさせ、圃場を荒らすという問題を解消する。
【解決手段】操向ハンドルを左又は右スピンターン領域に回動操作したときに、操向ハンドルの回動操作に対して抵抗を付与するデテント機構370の作用にて、操向ハンドルの操作感触を「重い」状態にする。
(もっと読む)
農薬散布用ホバークラフト
【課題】水田用ホバークラフトが操縦者から遠く離れた位置にあっても、的確に当該水田用ホバークラフトに対する操縦が実施できる極めて操作性が良い農薬散布用ホバークラフトを提供する。
【解決手段】本発明に係る農薬散布用ホバークラフト1は、ホバークラフト本体2に農薬用タンク3と散布装置6を装着し、遠隔操作によって散布装置6及びホバークラフト本体2を操作可能としたラジコンホバークラフトにおいて、ホバークラフト本体2後部に構成されるファンダクト11の上部に、船艇前方の映像をコントローラ21上のモニタ22に写すためのCCDカメラ13及び障害物に対する設定距離以上の接近を感知しコントローラ21上のスピーカ23から警告音を発生させる超音波センサー装置14を設けた。
(もっと読む)
農用作業車の制御装置
【課題】枕地での作業精度を向上させる。
【解決手段】旋回走行しうる走行機体に対して昇降可能な作業装置を設け、走行機体には作業装置の非作業位置への上昇及び作業位置への下降の各動作を旋回走行過程における所定のタイミングで行なう自動旋回制御装置を備える。作業装置にはフロートを備えて、フロートの接地により圃場面を均平整地可能に構成し、フロートの接地走行時には作業装置を所定の対地高さとなるように昇降制御可能に構成する。この昇降制御装置の制御感度が所定値より鈍感側に設定されると、前記自動旋回制御装置の実行を停止する。
(もっと読む)
1 - 17 / 17
[ Back to top ]