
Fターム[2B062BA41]の内容
移植機(田植機の要素) (4,646) | 構成、配置 (1,745) | 操向装置 (142)
Fターム[2B062BA41]の下位に属するFターム
操向車輪 (2)
クラッチとブレーキの連係 (31)
自動操向 (28)
遠隔操作装置 (1)
Fターム[2B062BA41]に分類される特許
1 - 20 / 80
作業機
電動農作業車のモータ制御装置
【課題】走行動力及び作業動力を発生させる動力用電動モータと、油圧ポンプを駆動させる油圧ポンプ用電動モータとをそれぞれ別々に備える2モータ方式の電動農作業車において、バッテリ消費を抑える。
【解決手段】走行機体1に昇降自在に連結される植付作業機3と、該植付作業機3を昇降させる作業機昇降用油圧シリンダ4と、該作業機昇降用油圧シリンダ4に圧油を供給する油圧ポンプ15と、該油圧ポンプ15を駆動させる油圧ポンプ用電動モータ5Bと、走行動力及び作業動力を発生させる動力用電動モータ5Aと、動力用電動モータ5A及び油圧ポンプ用電動モータ5Bの駆動を制御するモータ制御装置23と、を備える電動乗用田植機において、モータ制御装置23は、植付作業機3の昇降動作固定状態を検出すると共に、植付作業機3が昇降動作固定状態のときは、油圧ポンプ用電動モータ5Bの駆動を休止させる。
(もっと読む)
乗用型作業機

【課題】 旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性の点において課題があった。
【解決手段】 左右の駆動輪を備える走行車両を設け、遊転状態に切り替えた旋回内側の駆動輪の伝動軸回転数を検出し、旋回内側の駆動輪の伝動軸回転数の検出に基づいて走行距離算出手段にて走行距離を算出し、該走行距離に基づいて施肥装置の作動を自動的に行わせる制御装置を設けたことを特徴とする乗用型作業機とした。
(もっと読む)
苗移植機
【課題】
畦越走行時等に後側の苗植装置が上昇位置にあると、重心位置が高く、車体の前端部が上昇して、畦越走行姿勢が不安定となる。
【解決手段】
乗用走行車体5の後側に、リフトシリンダ6によって昇降のリフトリンク7を介して苗植装置8を連結し、前記リフトシリンダ6によって苗植装置8を下降させて底部のフロート9を接地滑走させながら均平土壌面に植付装置10により苗タンク11から繰出される苗を分離挿植すると共に、車体5の前端部にはこの車体5操作作用のグリップハンドル12を設けた苗植機において、前記グリップハンドル12を倒し操作することによって、苗植装置8を適宜位置まで下降させる構成とする。
(もっと読む)
田植機のステアリングコラム
【課題】ステアリングシャフトとトルクジェネレータの連結部の錆付きを防ぐとともに、グリス注入を容易として作業性を向上させた田植機を提供する。
【解決手段】ステアリングハンドル軸53,55にステアリングコラム56を覆設したステアリングシャフト52の下端を、トルクジェネレータ58に連結部57を介して連結し、連結部57では、カラー59を装着したステアリングシャフト52の下端部を、取付フランジ61を介してトルクジェネレータ58に支持させ、カラー59は、トルクジェネレータ58の上面に接する底部周面に、開口部60を形成するとともに、取付フランジ61の底部にも開口部60と連通する開口部63を形成したものである。加えて、カラー側開口部60と、取付フランジ側開口部63のそれぞれを組立てることによって、ラビリンス形状Lを構成した。
(もっと読む)
走行車両
【課題】 本発明の課題は、8条植えなどの多条植え用であっても適切な位置で苗の植え付けができる旋回連動制御装置を備えた乗用型作業機などの走行車両を提供することである。
【解決手段】 走行車両において、ステアリング機構に連動して旋回内側の走行推進体の駆動力を断つか制動する旋回連動機構と、走行推進体の伝動軸回転数検出手段と、走行車体の旋回時に、伝動軸回転数検出手段の検出による左右の走行推進体の回転数に基づき、旋回内側の走行推進体の回転数が旋回外側の走行推進体の回転数よりも小さい該旋回外側の走行推進体の回転数の所定値以下になれば、旋回内側の走行推進体を駆動することにより、旋回内側の走行推進体を駆動する状態と旋回内側の走行推進体の駆動力を旋回連動機構により断つか制動する状態を繰り返す断続的制御を実行する制御装置を備えた。
(もっと読む)
乗用型苗移植機
【課題】 乗用型苗移植機において、旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性の点において課題があった。
【解決手段】 苗移植作業装置を上昇させると共に走行距離算出手段にて走行距離の算出を開始し、該走行距離に応じて、先ず苗移植作業装置が下降する指令を出力し、その後、前記走行距離に応じて、線引きマーカ(195)が下降する指令を出力する制御装置(170)を設けた。
(もっと読む)
苗移植機
【課題】作業者が労力を費やすことなく「展開状態」と「収納状態」との切り替えを行うことができ、切替作業中であっても他の作業を中断せずにすみ、作業能率を向上することが可能な苗移植機を提供する。
【解決手段】第1〜3予備苗載台38a〜38cが前後一列に並んだ「展開状態」と、上下多段に並んだ「収納状態」とを第1〜3移動リンク部材39a〜39cにより切替可能な予備苗載台と、駆動力が与えられると、回動軸ax1,ax2を中心に第1〜3移動リンク部材39a〜39cを回動させる回動ギア300gと、回動ギア300gに駆動力を与える切替モータ300mとを設けた。
(もっと読む)
苗移植機
【課題】 旋回時、植え付け装置を機械的に自動上昇させる、安価な苗移植機の実現。
【解決手段】 走行車体2の車輪10の方向を制御するピットマンアーム60と、走行車体2の後側に設けられ、昇降油圧シリンダによって昇降させられる植え付け装置と、植え付け装置の昇降、植え付けを設定するための植え付け昇降レバー33と、昇降レバー33の操作に従って、昇降油圧シリンダを制御するカム74、位置決めローラ77等と、ピットマンアーム60に連結された連繋部材61、62、64、71と、連繋部材61、62、64、71に連結された旋回切替操作具73とを備え、旋回切替操作具73は、操舵部材が所定量以上回動すると、カム74、ローラ77などを機械的に駆動することによって植え付け装置52を上昇させるモードと、操舵部材が所定量以上回動しても、カム74、ローラ77などを駆動しないモードが選択出来る。
(もっと読む)
農業用作業車両
【課題】簡単な構成で旋回操作の開始及び終了を検出することが可能な農業用作業車両を提供する。
【解決手段】サイドクラッチ操作機構45は、ステアリングハンドル7が所定の操作量以上操作された場合に、サイドクラッチを切断する。クラッチセンサ49L,49Rは、サイドクラッチの作動状況を検出可能である。制御部は、植付部を昇降駆動するための昇降シリンダの駆動を制御する。植付クラッチは、植付部に対する駆動力の伝達の有無を切換可能である。また、前記制御部は、植付部の作動中において、植付クラッチの切断、サイドクラッチの切断、及び後進操作を、旋回時自動昇降制御の開始トリガとして検出可能である。そして、前記制御部は、開始トリガのうち何れか1つを検出すると、植付部を上昇させ、その後、前記サイドクラッチの接続を検出すると、植付部を下降させる。
(もっと読む)
乗用田植機
【課題】所望の箇所で正確に苗植付装置を下降可能な乗用田植機を提供する。
【解決手段】制御部50が、旋回時前期にて、植付クラッチ51、サイドクラッチ55をこの順に切り、旋回時後期にて、サイドクラッチ55、植付クラッチ51をこの順に入れる。そして、エンジン12から後輪17へ駆動力の伝達するための出力軸EOをサイドクラッチ55の上流側に備え、後輪17の回転数を検出する回転センサ54を出力軸EOに設け、旋回時後期にて、植付クラッチ51を入れるタイミングを、旋回時における植付クラッチ51を切ってからサイドクラッチ55を切るまでの間の回転センサ54の回転数と既定の回転数との和に基づいて制御部50が決定する。
(もっと読む)
乗用型田植機
【課題】植付部が自動的に昇降する際の安全性を向上させた乗用型田植機を提供する。
【解決手段】乗用型田植機は、車体と、報知部と、植付部と、植付部を上下に昇降するための昇降シリンダと、昇降シリンダの駆動を制御する制御部と、を備える。そして、前記制御部は、植付部を自動的に昇降させる制御を開始するトリガを検出した場合、前記報知部によって植付部の自動昇降を報知した後、昇降シリンダを駆動して植付部を昇降させる。
(もっと読む)
作業車両
【課題】本発明の課題は、旋回外側の後輪がスリップするようなときのみ旋回内側の後輪を駆動して走行不能に陥らないようにし、悪条件化でも旋回がスムースに行えるようにする。
【解決手段】制御部(163)に左右の後輪の回転数を検出する後輪回転センサ(205)を設け、断続的入り切り制御機能(B1)は、後輪回転センサにより検出された旋回外側の後輪の回転数に基づいて旋回内側の後輪の設定回転数を所定の演算式にて演算して設定するが、演算式は設定回転数を前記旋回外側の後輪の回転数よりも小さい値に設定する。設定回転数よりも検出される旋回内側の後輪の回転数が大きいときは旋回内側のサドクラッチを切りにし、設定回転数よりも検出される旋回内側の後輪の回転数が小さいときは旋回内側のサイドクラッチを入にする構成とする。
(もっと読む)
対地作業部付設の作業車両
【課題】圃場における作業領域と作業能率を損なうことなく、機体旋回の終了間際のリスクを抑えて安定した作業走行の再開を可能とする対地作業部付設の作業車両を提供する。
【解決手段】作業車両は、作業位置に下降可能な作業部と、駆動輪の伝動を左右個別に切替え可能なサイドクラッチと、これら作業部およびサイドクラッチのそれぞれについて、直進時は作業位置および両側伝動、旋回時は非作業位置および旋回内側を非伝動に制御する制御部とを備えて構成され、この制御部は、操舵装置による旋回動作の開始により旋回走行距離を計測しつつ、次の直進動作の開始の時に、サイドクラッチを両側伝動に切替えるとともに、この時点以降で所定の旋回走行距離に至る間に、作業部を作業位置に切替えるものである。
(もっと読む)
乗用移植機
【課題】差動装置による差動を規制することのできる乗用移植機において、様々な走行状態に適用可能で、効率的な作業走行及び路上走行を行うことができる汎用性の高い乗用移植機を提供する。
【解決手段】左右一対の前後輪と、異なる速度で動力を分配伝動させる差動状態で左右の前輪に動力を分配伝動可能な差動装置と、ステアリング作動に連動して旋回内側のサイドクラッチを切断作動させる連係機構とを備え、差動装置の差動状態を制動力によって規制する規制機構42を設けた乗用移植機において、上記制動力を発生させずに差動状態を規制しない路上走行用状態と、差動装置がデフロックされるように上記制動力を発生させるデフロック状態と、デフロック時よりも小さい制動力を発生させて差動状態を規制する作業走行用状態との少なくとも3つの状態に切換可能に前記規制機構42を構成した。
(もっと読む)
作業車の作業装置昇降構造
【課題】作業車の作業装置昇降構造において、旋回の終了に伴って上昇状態の作業装置が地面まで自動的に下降駆動されるように構成した場合、作業装置が下降駆動されるタイミングのばらつきを抑える。
【解決手段】機体が旋回を開始したと判断する旋回開始判断手段と、旋回開始判断手段により機体が旋回を開始したと判断されてからの旋回中の機体の走行距離Eを連続的に検出する走行距離検出手段とを備える。走行距離検出手段により検出された機体の走行距離Eが設定距離E1に達すると、上昇状態の作業装置を地面まで自動的に下降駆動させる自動下降手段を備える。
(もっと読む)
作業機
【課題】旋回内側の後輪による圃場の荒らしが軽減できると共に、連結されている作業装置の揺れを低減し、車両の操作性や作業装置の連結機構の耐久性を向上させる作業機の提供である。
【解決手段】走行車体2と、前輪10及び後輪11と、操縦席31と、操向ハンドル34と、操向ハンドル34の操作に連動して前輪10の向きを変更できるステアリング機構(86I、180、217)と、走行車体2の後側に昇降リンク装置3を介して昇降可能に装着された苗植付部4と、ステアリング機構(86Iなど)に連動して旋回内側の後輪11の駆動力を不規則に断続的に入切する不規則入り切り制御機能Bを備えた制御装置163とを備えた作業機である。車両の旋回時に旋回内側の後輪11が不規則に断続的に駆動することで、走行車体2上の構造物が後輪11の駆動力に共振することを防止し、走行車体2の揺れ及び振動を抑えて操縦者の作業環境を良好に維持できる。
(もっと読む)
水田作業車
【課題】水田作業車において、作業装置の昇降に伴って右又は左のマーカーを自動的に作用姿勢に操作するマーカー操作手段、及び、旋回終了位置の検出に基づいて作業装置を自動的に作業状態に操作する作業装置操作手段を備えた場合、マーカー操作手段及び作業装置操作手段を適切に作動及び停止状態に設定することができるように構成する。
【解決手段】マーカー操作手段54及び作業装置操作手段55の両方が作動する作動状態と、マーカー操作手段54及び作業装置操作手段55の両方が停止する停止状態とを設定するもので、人為的に操作される単一の人為操作具46を備える。
(もっと読む)
田植機
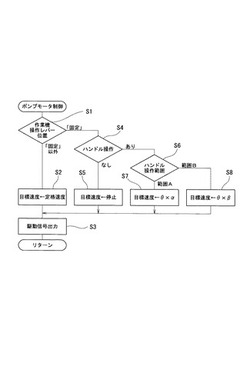
【課題】 本発明の課題は、機体旋回後の農作業装置の取扱いを可能な範囲で旋回動作と連動して自動処理することにより、オペレータの負荷を最小限度に抑えることができる自動植付作業車用制御装置を提供する点にある。
【解決手段】 操舵ハンドルとオペレータシートを備え、転向車輪と後輪の4輪で駆動する構成とし、機体後部に昇降部を介して昇降可能に植付部を設けた田植機において、旋回時のハンドル操作に基づいて後輪のドライブシャフト回転のカウントを開始し、該カウントが第一の所定値(n2’)になったときにハンドル角度が規定値(b)以上でなく、その後、カウントが第二の所定値(n2)になったとき、植付クラッチを入にする連動制御を備え、カウントが第一の所定値(n2’)になったときにハンドル角度が規定値(b)以上であれば、連動制御を終了する制御装置を設けた。
(もっと読む)
農作業車
【課題】 往復植付け走行から枕地の周回植付け作業に入った時に、不適正な農作業装置の稼動を回避できるように制御すると共に、マーカの作動精度上昇によって作業性が向上する農作業車を提供する。
【解決手段】 機体の旋回動作を検出する旋回検出手段により検出される旋回開始のタイミングと対応して農作業装置の停止と走行距離計の計測開始を指令し、その走行距離から判定される旋回完了による次行程の作業開始位置への到達によって上記農作業装置の稼動を指令する旋回制御を行う制御処理部を備える農作業車において、左右の後輪の回転数を検出する回転センサーに基づき、左右のマーカのうち回転数の多い側のマーカを出す制御を行う。
(もっと読む)
1 - 20 / 80
[ Back to top ]