
Fターム[2B062CA06]の内容
移植機(田植機の要素) (4,646) | 制御 (808) | 感度調節 (21)
Fターム[2B062CA06]に分類される特許
1 - 20 / 21
苗移植機
【課題】
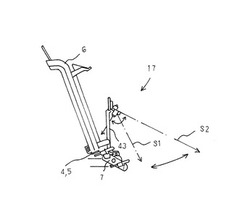
圃場の凹凸の多少、及び苗の植付姿勢を撮影装置で撮影し、撮影された画像に合わせて苗植装置の昇降、及び植付姿勢の安定化を自動的に図る苗移植機を提供する。
【解決手段】
苗取口4を形成した苗受ガイド5に送る苗タンク6と、苗タンク6の下部に設ける圃場面を滑走するセンタフロート1とサイドフロート2と、苗取口4を下降して苗を植え付ける植付装置7を設けて苗植装置8を構成し、苗植装置8を前輪10及び後輪12を備えた走行車体14の後側に装着した苗移植機において、苗植装置8の上方位置に圃場面の凹凸を表わす画像を撮影する撮影装置17を設け、撮影装置17が撮影した画像で圃場面の凹凸の多少を判別し、圃場面の凹凸が多いときは昇降リンク16を昇降させる昇降シリンダ15の昇降制御感度を低下し、圃場面の凹凸が少ないときは昇降シリンダ15の昇降制御感度を上げる制御構成とする。
(もっと読む)
田植機

【課題】フロートの上下動に対する昇降切換手段の切り換えの感度を制御し、植付装置における苗の植付深さを一定に保持することができる田植機を提供することを目的とする。
【解決手段】走行機体2の後方に昇降機構4を介して植付装置3を昇降自在に連結する田植機1において、昇降機構4には植付装置3を昇降する油圧シリンダ33(昇降アクチュエータ)と、油圧シリンダ33(昇降アクチュエータ)の昇降制御を行う油圧切換バルブ34(昇降切換手段)と、油圧切換バルブ34(昇降切換手段)の切換を行う切換操作アーム35とが備えられ、切換操作アーム35には植付装置3に設けられるフロート70の上下動を検知する上下動検知手段71と、走行機体2の走行速度を変更する変速アーム55とが連動連結され、油圧切換バルブ34(昇降切換手段)は、走行速度が増速側に変速されると、その増速に応じて植付深さが深くなる側に操作される田植機1である。
(もっと読む)
田植機における変速操作具の感度制御機構
【課題】変速操作具の操作感度を任意に設定して操作感度を変更可能にし、田植機の操作性の向上を図ることができる田植機における変速操作具の感度制御機構を提供する。
【解決手段】エンジン5と、無段変速装置21と、変速ペダル16(変速操作具)と、変速ペダル16(変速操作具)の操作量に基づいて無段変速装置21を変速制御する変速アクチュエータ60と、を備えた田植機2において、変速ペダル16(変速操作具)の操作感度を変更可能なペダル感度設定器89を備えて、田植機1における変速ペダル16(変速操作具)の感度制御機構を構成する。
(もっと読む)
乗用型水田作業機
【課題】乗用型水田作業機において、仕様の異なる複数の機種に亘って昇降操作具及び感度操作具を使用(兼用)する場合、部品点数を抑えながら適切に対処できるように構成する。
【解決手段】制御弁による水田作業装置の昇降操作を行うもので人為的に操作される昇降操作具29と、制御弁による水田作業装置の昇降操作の感度を変更するもので人為的に操作される感度操作具55とを、支持部材23,24,32,33,34に支持させて、支持部材23,24,32,33,34を機体フレーム21に連結する。
(もっと読む)
農作業機
【課題】農作業機において、取扱説明書を見なくても簡単且つ効率的に、各作動部の機能調整作業を行えるようにする。
【解決手段】農作業機における各種モードの情報を表示するための液晶ディスプレイ75と、前記情報を液晶ディスプレイ75に表示させる制御を実行するコントローラ130とを備える。コントローラ130のEEPROM132には、各作動部の調整方法を示すガイダンス情報を予め記憶させる。コントローラ130は、各作動部の機能調整を行う調整モードの実行時において、ガイダンス情報が複数ある場合は、タッチパネル76の所定箇所を手動操作する毎に、液晶ディスプレイ75に、調整対象の作動部に対するガイダンス情報を、優先順位の高い方から順に切り換え表示させる。
(もっと読む)
苗移植機
【課題】従来から公知の装置は、フロートの前側に軸架された整地ローターが、強制回転駆動されて整地作用を行う構成になっているが、それ以外の作用は期待されていない。本件出願は、前記整地ローターに本来の整地機能に加えて、土壌の硬軟度を検出する検出手段として利用するものである。
【解決手段】走行車体の後部に、制御手段(4)を装備した苗植付装置を連結して、接地センサ(5)の検出値に基づいて植付深さを設定位置に保持するために昇降制御作用を行う構成としている。前記苗植付装置の下側に設けたセンターフロート(6)の前側に、独立して上下動する中央整地作業装置(7)を設け、前記制御手段(4)は、前記中央整地作業装置(7)が上下動により検出した土壌の硬軟度に基づいて昇降制御の感度を補正する構成とした苗移植機としている。
(もっと読む)
移植機
【課題】植付に係る複数の作業装置を統括的に操作し、オペレータの負担を軽減し得るようにした移植機を提供する。
【解決手段】乗用田植機に対し、圃場端である枕地における作業にあっては、植付部、油圧制御装置、整地装置、或いはマーカ等の複数の作業部が同時に、枕地での制御状態となるように設定又は警報する1個の枕地スイッチ63を備えさせた。これにより、枕地での植付作業時に生じる複数の作業部の操作を1個の枕地スイッチ63によって統括的に行うことができる。
(もっと読む)
水田作業機
【課題】乗用田植機において畔際植付の作業操作を容易にする。
【解決手段】乗用田植機の走行車体には昇降アクチュエータにより苗植付装置を昇降自在に設け、苗植付装置側に設けた対地センサの検出情報に基づき所望の対地高さとなるように苗植付装置を昇降制御する昇降制御手段を設ける。苗植付装置には次行程の走行経路の指標となる位置に線を引く線引きマーカを設け、昇降制御手段の制御感度を鈍感側に変更し、且つ、線引きマーカを非作用状態に切り替える操作具を設ける。
単一の操作具を操作することにより、苗植付装置を畔際作業に対応することができ、苗植付装置の不適正作動及び線引きマーカの破損を防止することができる。
(もっと読む)
乗用型田植機
【課題】 乗用型田植機において、苗植付装置の前部に整地装置を支持した場合、植付設定高さを変更しても(設定深さを変更しても)、田面から整地装置までの高さ(整地深さ)が変化しないように構成する。
【解決手段】 整地装置53を苗植付装置の前部に昇降自在に支持し、整地装置53を苗植付装置に対して昇降駆動するアクチュエータ56を備える。苗植付装置の植付設定高さA1の変更に基づいて、整地装置53が田面Gから整地設定高さA2に維持されるようにアクチュエータ56を作動させる。
(もっと読む)
植え付け作業機の昇降制御構造
【課題】 部品レイアウトに苦慮することなく、又、コストの高騰並びに組み付け性やメンテナンス性の低下を招くことなく、植え付け深さ調節にかかわらず、自動昇降制御において、苗植付装置を予め設定した接地高さ位置に精度良く維持できるようにする。
【解決手段】 操作手段51により、植付機構16に対する接地体17の高さ位置を変更することで植え付け深さが調節され、制御手段40が、揺動角度検出手段54で検出される接地体17の検出角度θbが予め設定した制御目標角度θoと一致するように、苗植付装置昇降用のアクチュエータ2の作動を制御することで、苗植付装置4が予め設定した接地高さ位置に維持されるように構成した植え付け作業機の昇降制御構造おいて、植え付け深さ調節に連動して、揺動角度検出手段54の検出角度θbを補正する補正手段64を備えてある。
(もっと読む)
乗用型苗植機
【課題】実際の田植作業では昇降制御のセンサーである整地フロートはローリング制御による苗植装置の傾斜修正作動にて泥面から押上げ力を受けて上動する為に、苗植装置は上昇作動してしまい、苗の植付け深さが浅くなって苗が浅植えになったり植付けられなかったりする事態が発生した。
【解決手段】苗植装置25に設けた接地センサー32の接地圧が所定値に維持されるように昇降駆動装置28を制御する昇降制御手段と、苗植装置25の左右傾斜角度を検出する傾斜センサー64の検出値が所定値に維持されるようにローリング駆動装置60を制御するローリング制御手段とを備え、該ローリング制御手段によるローリング駆動装置60の作動中または作動中及び作動後の所定時間は昇降制御手段による苗植装置25を昇降駆動装置28にて上昇作動させる制御を牽制する制御装置51を設けた乗用型苗植機。
(もっと読む)
苗移植機
【課題】従来の田植機は、硬軟センサーの泥土の硬軟検出に応じて苗植装置を昇降させる感度を常に自動調節するものであって、作業状態を加味したものではなく、実作業では色々な不具合が発生することが判明した。
【解決手段】走行車体1に昇降自在に苗植装置25を装着し、該苗植装置25下部に整地フロート32を装備し、該整地フロート32の傾斜角に応じて苗植装置25を昇降させる昇降制御手段を設けると共に、圃場の泥土の硬軟を検出する硬軟センサー34を設けて、該硬軟センサー34の泥土の硬軟検出に応じて、苗植装置25を昇降させる制御感度を補正する昇降感度補正手段を設けた苗移植機において、機体に設けた車速検出機構が機体の進行速度が所定値以下であることを検出した場合には、昇降感度補正手段の感度補正を停止する苗移植機としたものである。
(もっと読む)
水田作業車
【課題】走行速度が変わっても苗植付部4の苗植付装置42の圃場に対する昇降制御を適切に行える水田作業車を提供すること。
【解決手段】水田作業者の走行速度が速いと硬軟センサ47が圃場の土壌が硬いと判断する傾向にあり、逆に走行速度が遅いと硬軟センサ47が圃場の土壌が軟らかいと判断する傾向にあるため、走行速度が急激に変化すると硬軟センサ47の検出値が不適正に変化して不安定になり、苗植付部4の昇降制御における制御感度が不適正になるおそれがある。これに対処するため、本実施例では、所定時間内に油圧式無段変速装置22の変速比又はエンジン回転数が所定以上変化して水田作業者の走行速度が急激に大きく変化すると硬軟センサ47の検出結果を無視するように制御装置48を機能させ、苗植付部4の昇降シリンダ33の作動制御を停止する。こうして、硬軟センサ47の誤検出の影響を苗植付装置42が受けない。
(もっと読む)
移植機
【課題】 苗植付装置の昇降制御感度の設定域を広くし乍ら、制御感度の微妙な調節を容易に行える移植機を構成する。
【解決手段】 走行機体の後部にリフトシリンダ4で駆動昇降自在に苗植付装置を連結し、この苗植付装置に備えた接地フロート20を、設定された制御感度に対応する目標姿勢に維持するよう該苗植付装置3の昇降を行う制御装置34を備え、制御感度を設定する人為操作型の感度設定器47と、この感度設定器47の設定域をシフトさせる人為操作型の補正スイッチ51とを備えた。
(もっと読む)
水田作業機
【課題】 接地フロート12が設定姿勢になるように水田作業装置10を昇降制御するものでありながら、自走車体や水田作業装置の走行速度や姿勢の変化にかかわらず、接地フロート12が田面に対して適切な姿勢で接地するように、かつ、ハンチングが発生しにくいようにする。
【解決手段】 昇降制御手段55は、フロート角センサ50による検出情報を基に設定制御目標フロート角を設定し、フロート角センサ50による検出フロート角が設定制御目標フロート角になるようにリフトシリダ6を操作する。昇降制御手段55は、車速感応モードになると、車速センサ52による検出車速が高速であるほど制御感度がより鈍感になるように制御感度を補正する。昇降制御手段55は、傾斜角補正モードになると、自走車体の傾斜角センサ51による検出前上がり傾斜角が設定値より大であるほど設定制御目標フロート角に対応するフロート姿勢が前下がり方向になった状態の設定制御目標フロート角を設定する。
(もっと読む)
作業機
【課題】 苗の植付をする田植え機等の作業機において、作業装置を圃場に接地させ、油圧の感度を鈍感側から設定値に戻す際に、作業装置のハンチングを誘発することなく、しかもフロートによる泥押等を発生させないようにした作業機を提供する。
【解決手段】 作業装置を下降させ、植付部(検知体)の圃場への接地を検知して油圧バルブの開度を調整して感度調整を行う際に、作業装置の下降開始時には、検知ワイヤに位置を11/11(鈍感側)に設定し、検知体の接地を検出した後、設定された鈍感側の検知感度と作業時の検知感度1/11(敏感側)との中間位置まで1、5秒(1〜2秒)、作業時の検知感度1/11まで3秒(2〜4秒)の時間をかけてゆっくりと変化させ、検知感度の切換によるハンチングの誘発や泥押しを防止する。
(もっと読む)
圃場走行作業用農作業車
【課題】圃場の往復作業走行の折返し部に来た際に、農作業装置の下降タイミングの調節を含む植付部の取扱いを要することなく、土壌の硬度に応じた機器制御により旋回走行跡の荒れに適切に対処することができる圃場走行作業用農作業車を提供する。
【解決手段】圃場走行作業用農作業車は、旋回操作に応じて圃場を旋回走行しうる機体と、この機体に対して昇降可能に支持されて作業位置で圃場作業をするとともに均平整地用のフロート15を備えた植付部7と、この植付部7について旋回操作の検出に応じて非作業位置への上昇、作業位置への下降の各動作を旋回走行過程の所定のタイミングで動作制御する制御部21とを備えて構成され、上記植付部のフロート15に圃場作業対象となる土壌の高さ位置を感度調節可能に検出するフロートセンサ15sを設け、このフロートセンサ15sの感度と連動して上記植付部の下降動作のタイミングを変更するように制御する。
(もっと読む)
農作業機の昇降操作装置
【課題】 走行機体に連結した作業装置を油圧シリンダで駆動昇降するよう構成するとともに、前記油圧シリンダの作動を司る制御バルブを、上昇位置、および、下降位置に亘って操作可能な昇降レバーによって切換え操作するよう構成した農作業機の昇降操作装置において、作業装置を大きく昇降させる場合には速やかに昇降させることができるとともに、少しだけの昇降を簡単かつ正確に行えるようにする。
【解決手段】 昇降レバーの操作径路における、「中立」位置と「上昇」位置との間を、「上昇」位置に操作されたときの基準上昇速度Vusと異なる速度で作業装置を上昇作動させる上昇用中間操作域に設定するとともに、「中立」位置と「下降」位置との間を、「下降」位置に操作されたときの基準下降速度Vdsと異なる速度で作業装置を下降作動させる下降用中間操作域に設定してある。
(もっと読む)
乗用型作業機
【課題】前輪に対する操向操作を行うだけで、旋回内側の後輪を制動させて旋回を操作性良く行える乗用型田植機があるが、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入切操作や上下動操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性において課題があった。
【解決手段】操向用の左右前輪6・6とエンジン12からの動力を変速する伝動装置からの出力で駆動される左右後輪7・7を備え、左右後輪7・7への駆動を各別に入り切りする左右サイドクラッチI・Iを設けた乗用型作業機おいて、左右前輪6・6を所定の速度以上の速さ又は所定以内の均一な操向速度で所定角度以上に操向操作すると、旋回内側となる後輪7のサイドクラッチIを切り、旋回内側となる後輪7の回転数の検出に基づいて走行距離を算出して、旋回時の諸作業用の作動を自動的に行わせる制御装置170を設けた乗用型作業機。
(もっと読む)
乗用型苗移植機
【課題】圃場での苗移植作業時に、走行車両の左右傾きや左右方向への機体移動により苗移植作業装置が横移動して、泥や土を苗移植作業装置の側方に押出してしまって、既に植えた苗を押倒してしまう課題があった。
【解決手段】走行車両1に昇降用リンク装置2によって昇降自在に装着された苗移植作業装置3と、この苗移植作業装置3の対地高さを検出する高さ検出手段165と、この高さ検出手段165の検出情報に基づいて前記苗移植作業装置3の対地高さを所定高さに維持するように、昇降用リンク装置2を駆動する昇降制御手段を備えた乗用型苗移植機において、苗移植作業装置3が対地左右方向に移動したことを検出する横移動検出手段KSを設けて、横移動検出手段KSの苗移植作業装置3が対地左右方向に移動したことを検出したとき昇降制御手段の昇降制御感度を設定値よりも敏感側に切換える感度設定手段を設けた乗用型苗移植機。
(もっと読む)
1 - 20 / 21
[ Back to top ]