
Fターム[2B062CA07]の内容
移植機(田植機の要素) (4,646) | 制御 (808) | 土壌硬度検出制御 (13)
Fターム[2B062CA07]に分類される特許
1 - 13 / 13
田植機
【課題】土壌条件や植深をリアルタイムで取得できる田植機を提供する。
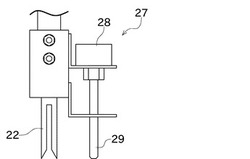
【解決手段】田植機は、土壌反力検出装置27と、植付爪22を備えた植付部と、土壌反力検出装置27の出力に基づいて苗の植深を算出する制御部と、を備えている。土壌反力検出装置27は、植付爪22に生じる土壌反力を検出する。また土壌反力検出装置27は、植付爪22の近傍に配置されるプローブ29と、ロードセル28とを備える。前記プローブ29は、植付爪22の長手方向と平行に配置された棒状部材であり、その一端側は植付爪22の先端と同じ方向を向くとともに、他端側はロードセル28の荷重検出面に当接している。
(もっと読む)
田植機

【課題】土壌条件や植深をリアルタイムで取得できる田植機を提供する。
【解決手段】田植機は、植付部と、土壌反力検出装置と、制御部と、を備える。植付部は、植付爪を駆動することにより苗の植付けを行う。土壌反力検出装置は、植付爪が苗の植え付けを行うごとに土壌から受ける土壌反力を検出する土壌反力検出部と、植付爪の回転位相を検出する回転位相検出部を備えている。前記制御部は、前記土壌反力及び回転位相に基づいて植深値を算出する(S102)。そして制御部は、検出された植深値に基づいて、植付部を昇降制御する(S109)。
(もっと読む)
苗移植機
【課題】ぬかるみやすい圃場における安定走行の確保とともに、ぬかるみにくい圃場における燃費向上および排ガス低減を可能とする苗移植機を提供する。
【解決手段】苗移植機は、エンジン(5)の動力を変速して走行装置(2,3)および苗移植装置(6)に伝動する変速伝動装置(4)、変速レバー(4a)の指示に応じてエンジン(5)および変速伝動装置(4)を動作制御する制御装置(11a)等を設けて植付け走行可能に構成され、上記制御装置(11a)は、変速レバー(4a)の指示に対するエンジン回転の動力特性が、低燃費走行用の低回転モード(L)と、通常の回転による標準モード(M)と、ぬかるみ走行用の高回転モード(H)のいずれかを選択可能に構成するとともに、変速レバー(4a)の指示が停車時の停止速および発進直後の低速域の範囲について高回転モード(H)を適用するものである。
(もっと読む)
作業車両
【課題】
土壌状態に合わせてエンジンの燃料噴射量を変更し、安定した土壌ではエンジンの回転数を減少させて燃費を向上させると共に、不安定な圃場ではエンジンの回転数を増大させて走行姿勢を安定させることのできる作業車両を提供する。
【解決手段】
左右の前輪6,6と左右の後輪7,7により圃場を走行する走行車体9にエンジン8を設け、走行車体9の後部に圃場に苗を植え付ける植付部5を設けた作業車両において、走行する土壌の状態を検出する土壌センサ10を設け、土壌センサ10が検出した土壌状態に合わせてエンジン8の燃料の噴射量を増減制御する構成とし、土壌センサ10の下部に、土壌センサ10の検出面11に間欠的に接触して付着物を除去する清掃部材12を設ける。
(もっと読む)
乗用田植機
【課題】本発明の課題は、車速の変化に応じて整地ロータ、特に中央のセンタロータを昇降制御することによって、ロータの地中への潜り込みを防止し、整地作業が的確に行えるようにする。
【解決手段】この発明は、苗植付部(4)の前側に植付直前の圃場面を均平化する前位のセンタロータ(27b)と後位のサイドロータ(27a)からなる整地ロータ(27)を設置し、該整地ロータ(27)は、車速の変化に応じて上下動可能に構成すると共に、車速の所定以上の増速に伴い前位のセンタロータが上昇変位すべく関連構成する。
(もっと読む)
作業車両
【課題】本発明の課題は、旋回外側の後輪がスリップするようなときのみ旋回内側の後輪を駆動して走行不能に陥らないようにし、悪条件化でも旋回がスムースに行えるようにする。
【解決手段】制御部(163)に左右の後輪の回転数を検出する後輪回転センサ(205)を設け、断続的入り切り制御機能(B1)は、後輪回転センサにより検出された旋回外側の後輪の回転数に基づいて旋回内側の後輪の設定回転数を所定の演算式にて演算して設定するが、演算式は設定回転数を前記旋回外側の後輪の回転数よりも小さい値に設定する。設定回転数よりも検出される旋回内側の後輪の回転数が大きいときは旋回内側のサドクラッチを切りにし、設定回転数よりも検出される旋回内側の後輪の回転数が小さいときは旋回内側のサイドクラッチを入にする構成とする。
(もっと読む)
移動農作業機の変速操作装置
【課題】 農作業走行の土壌条件によって、車体の沈下が著しい場合があり、作業はもとより走行不能状態に至ることがある。又、逆に車体の沈下が少ない土壌面での走行では、走行負荷が小さく加速し易いため、この車速の加速は制限されるのが望ましい。
【解決手段】 走行しながら対地作業する移動農作業機において、車体の沈下量の検出に基づいて、この沈下量が大きいときは、変速スイッチ2の操作による変速アクチュエータ3の変速操作の速さを速くし、又、沈下量が小さいときは、この変速操作の速さを緩くする構成とする。
(もっと読む)
乗用田植機
【課題】 本発明の課題は、枕地(圃場の畦の近傍)で整地作業を忘れることなく、枕地に来ると自動的に整地作業をする乗用田植機を提供することである。
【解決手段】 左右の前輪及び後輪を備える走行車体の後部に昇降リンク装置を介して苗植付部を昇降可能に装着し、マーカアームを線引き作用部が圃場内に線を引く線引き位置とマーカアームを起立する非線引き位置に作動させる線引きマーカを設け、走行車体の後側で且つ苗植付部よりも前側に配置されると共に苗植付部に取り付けられる均平装置(28)を設け、電動モータ(37)の正逆転により支持アーム(32)を回動させて均平装置(28)を昇降させると共に、バネ(33)の付勢力に抗して支持アーム(32)が下側へ回動する構成とした乗用田植機とした。
(もっと読む)
対地作業機
【課題】 整地ロータを備える水田作業機は、機体の前後長が長くなり、機体の前後重量バランスの悪化を招き、対地作業部による作業性を悪化させるおそれがある。また、整地ロータの後方位置に硬軟検出具を配置すると整地ロータからの泥流や水流が硬軟検出具に作用して硬軟検出が不安定になるおそれがある。
【解決手段】 対地作業部に機体正面視で左右後輪11間に位置するセンターフロート55の前方には左右後輪11間に中央整地ロータ27bを設け、左右後輪11の後方若しくは外側方に位置するサイドフロート56の前方には機体側面視で左右後輪11の後方に左右整地ロータ27aを設けると共に、中央整地ロータ27bの駆動軸70bと同じ軸心回りに上下に回動して先端部が土壌に突入することにより土壌の硬軟度を検出する硬軟検出具116を設け、該硬軟検出具116を中央整地ロータ27bと後輪11との間で且つ左右整地ロータ27aより前側に配置した。
(もっと読む)
苗移植機
【課題】従来から公知の装置は、フロートの前側に軸架された整地ローターが、強制回転駆動されて整地作用を行う構成になっているが、それ以外の作用は期待されていない。本件出願は、前記整地ローターに本来の整地機能に加えて、土壌の硬軟度を検出する検出手段として利用するものである。
【解決手段】走行車体の後部に、制御手段(4)を装備した苗植付装置を連結して、接地センサ(5)の検出値に基づいて植付深さを設定位置に保持するために昇降制御作用を行う構成としている。前記苗植付装置の下側に設けたセンターフロート(6)の前側に、独立して上下動する中央整地作業装置(7)を設け、前記制御手段(4)は、前記中央整地作業装置(7)が上下動により検出した土壌の硬軟度に基づいて昇降制御の感度を補正する構成とした苗移植機としている。
(もっと読む)
苗移植機
【課題】従来の田植機は、硬軟センサーの泥土の硬軟検出に応じて苗植装置を昇降させる感度を常に自動調節するものであって、作業状態を加味したものではなく、実作業では色々な不具合が発生することが判明した。
【解決手段】走行車体1に昇降自在に苗植装置25を装着し、該苗植装置25下部に整地フロート32を装備し、該整地フロート32の傾斜角に応じて苗植装置25を昇降させる昇降制御手段を設けると共に、圃場の泥土の硬軟を検出する硬軟センサー34を設けて、該硬軟センサー34の泥土の硬軟検出に応じて、苗植装置25を昇降させる制御感度を補正する昇降感度補正手段を設けた苗移植機において、機体に設けた車速検出機構が機体の進行速度が所定値以下であることを検出した場合には、昇降感度補正手段の感度補正を停止する苗移植機としたものである。
(もっと読む)
水田作業車
【課題】走行速度が変わっても苗植付部4の苗植付装置42の圃場に対する昇降制御を適切に行える水田作業車を提供すること。
【解決手段】水田作業者の走行速度が速いと硬軟センサ47が圃場の土壌が硬いと判断する傾向にあり、逆に走行速度が遅いと硬軟センサ47が圃場の土壌が軟らかいと判断する傾向にあるため、走行速度が急激に変化すると硬軟センサ47の検出値が不適正に変化して不安定になり、苗植付部4の昇降制御における制御感度が不適正になるおそれがある。これに対処するため、本実施例では、所定時間内に油圧式無段変速装置22の変速比又はエンジン回転数が所定以上変化して水田作業者の走行速度が急激に大きく変化すると硬軟センサ47の検出結果を無視するように制御装置48を機能させ、苗植付部4の昇降シリンダ33の作動制御を停止する。こうして、硬軟センサ47の誤検出の影響を苗植付装置42が受けない。
(もっと読む)
乗用型苗移植機
【課題】圃場での苗移植作業時に、走行車両の左右傾きや左右方向への機体移動により苗移植作業装置が横移動して、泥や土を苗移植作業装置の側方に押出してしまって、既に植えた苗を押倒してしまう課題があった。
【解決手段】走行車両1に昇降用リンク装置2によって昇降自在に装着された苗移植作業装置3と、この苗移植作業装置3の対地高さを検出する高さ検出手段165と、この高さ検出手段165の検出情報に基づいて前記苗移植作業装置3の対地高さを所定高さに維持するように、昇降用リンク装置2を駆動する昇降制御手段を備えた乗用型苗移植機において、苗移植作業装置3が対地左右方向に移動したことを検出する横移動検出手段KSを設けて、横移動検出手段KSの苗移植作業装置3が対地左右方向に移動したことを検出したとき昇降制御手段の昇降制御感度を設定値よりも敏感側に切換える感度設定手段を設けた乗用型苗移植機。
(もっと読む)
1 - 13 / 13
[ Back to top ]