
Fターム[2B062CA09]の内容
移植機(田植機の要素) (4,646) | 制御 (808) | ピッチング制御 (13)
Fターム[2B062CA09]に分類される特許
1 - 13 / 13
田植機
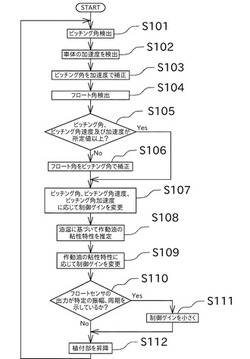
【課題】田植機において、ピッチング角等に基づく補正を適切に行い、良好な昇降制御性能を得ることができる構成を提供する。
【解決手段】制御部は、フロートの揺動角の検出値を、ピッチング角に基づいて補正して(ステップS106)、植付部を昇降制御するように構成されている。そして制御部は、ピッチング角の変化速度又は加速度が大きい場合には、前記補正を行わない。即ち、車体が急激なピッチング挙動を示すときには、ピッチング角による補正の影響を小さくすることにより、意図しない昇降制御が行われてしまうことを防止し、植付部の不必要な高さ変動を抑えることができる。
(もっと読む)
移植機

【課題】機体の前上がり傾斜が所定の傾斜角以上になる畦越え作業や、機体の後部に昇降自在に連結した植付作業機が圃場から脱出するぎりぎりの状態(植終い)までの植付作業を、オペレータが乗用型田植機に搭乗した状態で行えるようにする。
【解決手段】機体の前後方向の傾斜を検出するピッチングセンサ69が所定の傾斜角以上の機体の前上がり傾斜を検出している時、自動昇降制御中にはフロート23の基準姿勢を基準値かた前下がり状態に姿勢変更して自動昇降制御を継続し、自動昇降制御中でなければ植付を停止した状態でフロート23を接地させた植付作業機5の自動昇降制御を実行する制御手段61を設ける。
(もっと読む)
苗移植機
【課題】 本発明は、苗植付部の前後傾斜姿勢の制御は高精度で適正に行うことを課題とする。
【解決手段】 機体の走行の加減速を検出する走行加速度センサ(222)を設け、該走行加速度センサ(222)の検出に基づき、走行が加速されているときには苗植付部(4)を後上がり側へ前後傾斜させるべく前後傾斜用アクチュエータ(203)を作動させ、走行が減速されているときには苗植付部(4)を後下がり側へ前後傾斜させるべく前後傾斜用アクチュエータ(203)を作動させる制御装置を設けた苗移植機とした。
(もっと読む)
苗移植機
【課題】
圃場に凹凸がある度に植付部の植付深さが変更されると、かえって苗の植付深さが不安定になるため、機体が設定値以上傾斜するとアクチュエータの制御弁の作動時間が長くなる制御を行なう。
【解決手段】
苗を圃場に植え付ける植付装置4を備えた植付部5を走行車体8の後部に設け、植付部5を昇降させるアクチュエータ9を設け、センタフロート1の上下揺動によってアクチュエータ9の制御弁10を切り替えて植付部5を昇降させ、苗の植付深さを所定深さに維持する植付昇降制御可能に構成した苗移植機において、走行車体8に傾斜センサ11を設け、傾斜センサ11が検知する走行車体8の前後方向の設定値以上の傾斜を検出するとこの検出値から制御弁10を出力作動するまでの間の応答時間を長くする制御を行なう構成とする。
(もっと読む)
田植機
【課題】走行部が傾斜しても整地装置を適切な位置で整地作業をすることができる田植機を提供する。
【解決手段】
走行部の後方に植付部を昇降自在に連結し、同植付部の前方に整地装置を昇降自在に取り付けた田植機において、走行部の前後方向の傾斜角度を検出する傾斜角度検出手段と、植付部の植付深さ位置を検出する植付深さ位置検出手段と、両検出手段の検出結果に基づいて整地装置の整地高さを算出補正する制御部と、同制御部により制御されて整地装置を昇降させる昇降用アクチュエータとを具備するようにしている。
(もっと読む)
苗移植機
【課題】 本発明の課題は、機体の前後傾斜姿勢を修正するために自動的に後輪を下降させる機構を、機体の重量アップやコストアップを抑えて簡単に構成することにある。
【解決手段】 左右の前輪及び左右の後輪(4)を備える車体を設け、該車体の後方には昇降可能な苗植付部を設け、後輪車軸(56)を備える後輪伝動ケース(34)と該後輪伝動ケース(34)の入力軸(34b)へ前側から伝動する後輪伝動軸(33)とを設け、回動支点軸(54)より後側に後輪車軸(56)が位置するように前記後輪伝動ケース(34)を前記回動支点軸(54)回りに上下に回動可能に装着し、後輪伝動ケース(34)の下側への回動を付勢する圧縮スプリングを設け、後輪伝動ケース(34)の上下方向の回動域を規制する規制部材(57,58)を設け、前記圧縮スプリングを規制部材(57,58)の外周に巻回する構成とした苗移植機とした。
(もっと読む)
苗植機
【課題】 苗植機の車体姿勢の制御には、傾斜センサとして、液面気泡形態や、振子形態等のセンサを用いることが一般的であるが、この傾斜検出の制度調整が安定し難く、制御構成が煩雑である。
【解決手段】 左、右車輪ケースを、車体に対して上下揺動可能に設けた苗植機において、苗植嘴による左、右各苗植付位置を培土する培土ディスク4、乃至鎮圧する鎮圧ロールの上下揺動によってピッチング制御、及びローリング制御することを特徴とする。
(もっと読む)
移植機
【課題】機体の前上がり傾斜が所定の傾斜角以上になる畦越え作業や、機体の後部に昇降自在に連結した植付作業機が圃場から脱出するぎりぎりの状態(植終い)までの植付作業を、オペレータが乗用型田植機に搭乗した状態で行なえるようにする。
【解決手段】ピッチングセンサ69が検出する機体の前上がり傾斜が所定の傾斜角以上になった時、植付作業中であれば検知体として作用するセンターフロート23の基準姿勢を前下り状態に姿勢変更して植付作業を継続し、植付作業中でなければセンターフロート23が接地しない所定の低位置に植付作業機5を位置させる制御手段61を設けた。
(もっと読む)
乗用田植機
【課題】苗継ぎ時に、植付部を所定の高さまで上昇させるとともに、当該植付部を傾斜させることにより、苗継ぎ作業に必要な労力を低減することが可能な田植機を提供する。
【解決手段】走行部10と、走行部10の後部に具備され、植付作業を行う植付部30と、上部リンク52及び下部リンク53を備え、植付部30を走行部10に対して昇降可能に支持する昇降リンク機構50と、を具備する乗用田植機1において、上部リンク52を伸縮させることにより、走行部10に対する植付部30の相対角度θを変更する角度変更アクチュエータ52cと、昇降リンク機構50により、植付部30を所定の高さに調節するとともに当該高さで停止させ、角度変更アクチュエータ52cにより、植付部30の相対角度θを所定の相対角度θs−dβ1に調節する苗継ぎ制御を行う制御部100と、を備えた。
(もっと読む)
苗植機
【課題】本発明では、畦越えの走行速度を気にすることなく任意のスピードで畦越えをしても走行車体が不安定になることなく圃場の畦際まで適正な植付深さで苗を植付けられるようにすることが課題である。
【解決手段】走行車体の後側に苗植付部を装着した苗植機において、走行車体の前後傾斜検出手段と走行速度検出手段を設け、前後傾斜検出手段による走行車体の上向き傾斜の検出で畦越え植付昇降制御モードに移行し、この畦越え植付昇降制御モードでは走行速度検出手段が検出する走行速度の高低に応じて苗植付部の上昇速度を高低に変更制御するように苗植機の苗植昇降制御装置を構成した。
(もっと読む)
水田作業機の自動昇降制御装置
【課題】 走行機体の後部に昇降自在に連結した水田作業装置にセンサフロートを上下揺動自在に装備し、センサフロートの揺動角度を目標角度に維持するように水田作業装置を昇降制御するよう構成した水田作業機の自動昇降制御装置において、走行機体の前後傾斜を応答性良く的確に検知して、的確な目標角度補正を行い、安定した作業深さをもたらす昇降制御を実行できるようにする。
【解決手段】 走行機体に機体前後方向の角度変化を検知する角速度センサ31を設け、この角速度センサ31の検出情報に基づいてセンサフロートの目標角度θ0を自動補正する制御手段を備えてある。
(もっと読む)
苗移植機
【課題】圃場における適正な整地作業の実現をはかり、整地装置にかかる負荷を低減し、経済的で、作業効率の良い苗移植機を提供することである。
【解決手段】走行車体10の後ろ側にある苗植付部20は前後にピッチング動可能であり、苗植付部20の前側には整地装置22を取り付けている。更に整地装置22は苗植付部20と共に前後にピッチング動するように苗植付部20と連結して支持されている。
苗植付部20に対して整地装置22を上下動させる上下動装置23を設け、苗植付部20が前方へ傾きながらピッチング動するのに連動させて、整地装置22を上昇させる構成とした。
(もっと読む)
乗用型作業機
【課題】従来、前輪の直進状態から所定角以上の操向によって左右後輪の旋回内側のもののサイドクラッチを切って制動する旋回連繋機構を設けた乗用型田植機があるが、操縦者は旋回に適した車速となるように、アクセル操作若しくは変速操作しなければならず、旋回時の操向操作に専念できず、旋回操作性の点において課題があった。
【解決手段】操向用の左右前輪6・6と左右後輪7・7・を有する乗用型走行車両において、左右後輪7・7への駆動を各別に入り切りする左右サイドクラッチI・I若しくは左右後輪7・7を各別に制動する左右サイドブレーキJ・Jを設けて、左右前輪6・6の所定角度以上の操向操作に連動して、左右前輪6・6の操向方向側の後輪7のサイドクラッチIを切るかサイドブレーキJをかける連携手段を設けると共に、機体旋回位置を判断する手段を設けて機体旋回時に車速を減速する手段を設けた乗用型走行車両。
(もっと読む)
1 - 13 / 13
[ Back to top ]