
Fターム[2B062CB01]の内容
移植機(田植機の要素) (4,646) | センサー (158) | 接触式(機械式) (111)
Fターム[2B062CB01]の下位に属するFターム
Fターム[2B062CB01]に分類される特許
1 - 20 / 67
乗用移植機
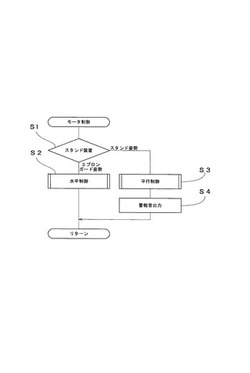
【課題】植付作業機を傾斜した地面に下ろす際に、植付作業機や強制傾斜機構の破損を防止する。
【解決手段】走行機体1の後部に昇降自在かつ左右傾斜自在に連結される植付作業機3と、植付作業機3の走行機体1に対する左右傾斜姿勢を水平制御モータ15の動力で強制的に変化させる強制傾斜機構19と、植付作業機3が水平姿勢を維持するように水平制御モータ15を駆動制御する水平制御手段と、スタンド姿勢と非スタンド姿勢とに変姿可能な状態で植付作業機3に設けられ、植付作業機3を地面に下ろす際にスタンド姿勢とされるスタンド装置23と、を備える乗用移植機であって、スタンド装置23の姿勢を検出するスタンド検出スイッチ29と、スタンド装置23がスタンド姿勢のとき、植付作業機3が走行機体1に対して平行となるように水平制御モータ15を駆動制御する平行制御手段と、を備える。
(もっと読む)
乗用型水田作業機

【課題】外部操作レバーを操作して走行機体を移動させる状況で移動を迅速に停止させ得る乗用型水田作業機を構成する。
【解決手段】ブレーキペダル26を走行機体の前部位置から操作することでブレーキ機構11を操作する外部操作レバー63を備え、この外部操作レバー63を上方に操作することでエンジン5を強制的に停止させる強制停止手段Eを備えた。
(もっと読む)
田植機
【課題】土壌条件や植深をリアルタイムで取得できる田植機を提供する。
【解決手段】田植機は、土壌反力検出装置27と、植付爪22を備えた植付部と、土壌反力検出装置27の出力に基づいて苗の植深を算出する制御部と、を備えている。土壌反力検出装置27は、植付爪22に生じる土壌反力を検出する。また土壌反力検出装置27は、植付爪22の近傍に配置されるプローブ29と、ロードセル28とを備える。前記プローブ29は、植付爪22の長手方向と平行に配置された棒状部材であり、その一端側は植付爪22の先端と同じ方向を向くとともに、他端側はロードセル28の荷重検出面に当接している。
(もっと読む)
作業車両
【課題】走行停止状態での待機時間を不要としつつ、後進走行中に従来より短時間に作業機を上昇できる作業車両を提供すること。
【解決手段】機体2の後部に苗移植装置7を装着するためのリンク機構8と、リンク機構を昇降させる昇降装置30と、機体2に設けられたエンジン6と、エンジン6の動力を変速して出力する変速装置5と、前進走行域、停止域、及び後進走行域の何れかの位置に切り替えることにより、変速装置の出力を変化させて走行速度を操作する走行操作レバー10と、走行操作レバー10が少なくとも後進走行域にある場合に苗移植装置7の上昇速度をエンジン回転数に基づいて制御する第1の制御を行う制御部200とを備え、第1の制御は、走行操作レバー10が、後進走行域の内、走行速度を最高に設定する最高速位置にあるときのエンジン回転数よりも、最高速位置より手前の位置にあるときのエンジン回転数の方を高くする制御である、作業車両。
(もっと読む)
苗移植機
【課題】
畦際の旋回痕を整地ロータで充分に均し、圃場均平用フロートで均平にすることで、畦際での苗の植付深さを揃える苗移植機を提供することにある。
【解決手段】
走行車体2の後部に整地ロータ27とフロート55,56と苗植付装置52を設けた苗植機において、左右の整地ロータ27a,27bをそれぞれ独立昇降自在に構成し、畦際での植付作業を検出する畦際検出部材SAを設け、畦際検出部材SAで検出した畦側の整地ロータ27a,27bを反対側の整地ロータ27a,27bよりも下方へ降下させ、畦際検出部材SAを、左右の畦クラッチレバー71,71の操作を検知する左右の畦クラッチスイッチ71a,71bで構成し、左右の畦クラッチスイッチ71a,71bを操作すると左右の整地ロータ27a,27bのいずれか一方を下方に下降させる構成とする。
(もっと読む)
移植機
【課題】苗搬送台が標準位置から水平回動姿勢にあり、機体が走行開始操作状態にあることを検出し警報することにより、苗搬送台の標準姿勢への戻し操作を促し、移植作業をスムーズに行うことができる移植機を提供する。
【解決手段】走行機体から立設した支持フレーム19に支持されて予備苗を機体前方から後方に向けて搬送供給する苗搬送台7を設けた移植機であって、前記苗搬送台7を機体前後方向に沿った標準位置と、該標準位置から外方位置の水平回動姿勢に姿勢変更自在に設け、且つ苗搬送台7の上記水平回動姿勢を検出する検出手段12と、機体の走行開始操作を検出する検出手段とを備え、上記苗搬送台7が標準姿勢以外にあり、且つ機体が走行開始操作状態にあるとき、検出手段12と検出手段との検出信号により警報を発する警報手段を設けた。
(もっと読む)
苗移植機
【課題】
機体の走行により圃場の面積を算出し、算出した面積から苗の植付作業の進捗具合、苗や施肥肥料の使用量、作業に要する時間等を算出可能な苗移植機を提供する。
【解決手段】
後輪2,2の駆動回転を検出する回転検出部材1を設け、回転検出部材1が検出する後輪2,2の回転数から走行距離を算出する走行車体3に苗植装置4を設けた苗移植機において、回転検出部材1の検出結果と、走行車体3の前側に設ける前輪5,5の操向旋回を検出する操向検出部材6の検出結果によって、各植付走行条の走行距離Bと、植付走行条の端部での折返旋回距離Cを算出し、走行距離Bと折返旋回距離Cから苗植付条面積Eを算出する構成とする。
(もっと読む)
移植機
【課題】非植付走行時に植付クラッチ入れ忘れ警報を行ってオペレータに不快感を与えるという問題を解決する。
【解決手段】走行機体1の後部に昇降自在に連結され、下降接地状態で植付作業を行う植付作業機3と、植付作業機3の植付動力を入り/切りする植付クラッチ21と、植付作業機3から左右外方に選択的に振り出されて次行程に走行基準線を引く左右一対のマーカ33L、33Rと、植付作業機3の下降時にマーカ33L、33Rを自動的に振り出すマーカ自動制御手段(制御部35)とを備える乗用型田植機において、植付クラッチ21を入れ忘れた状態で植付走行を開始した、または、開始する可能性があると判断したとき、所定の警報を行う植付クラッチ入れ忘れ警報手段(制御部35の警報制御)を備えると共に、マーカ自動制御がOFFのときは、植付クラッチ入れ忘れ警報手段による警報を行わないようにする。
(もっと読む)
苗移植機
【課題】 本発明の課題は、接地検出センサとして、地表面に接触することにより発生する歪、衝撃が検出できる圧電セラミックス素子を用いることによって、低コストで地表面の変化を的確に検出でき、シンプルな制御が可能な制御手段を具現することにある。
【解決手段】 本発明は、苗植付部(2)の前側に地表面を整地する整地ロータ(4)を備えてある苗移植機において、圃場の地表面に対する接触により発生する歪、衝撃が検出できる圧電セラミックスプレートからなる接触検出センサ(3)を苗植付部(2)の適所に配置して設け、該接地検出センサ(3)は、この接地面が地表面に沿うように対設すると共に、地表面の変化検出結果に基づき苗植付部の植付姿勢を自動制御する。
(もっと読む)
乗用型農作業機
【課題】HSTのような無段変速機を備えた田植機において、変速等を司る操作部材の損傷防止と動作確実性とを図る。
【解決手段】操縦エリアのフロアー部26aは車体カバー26で構成されており、フロー部26aの下方にミッションケース18が配置されている。ミッションケース18の側面にはHST41が取り付けられている。HST41の出力制御軸61は上向きに突出している。車速を調節する出力制御アーム126,走行停止によって主クラッチを切るクラッチロッド155,ブレーキ入りとクラッチ切りとを関連させるクラッチアーム159といった操作部材は、全体又は一部がミッションケース18の上方に配置されている。ミッションケース18が操作部材に対する保護機能を発揮するため、操作部材の損傷を防止又は抑制できると共に、動きの確実性も向上できる。
(もっと読む)
移植機
【課題】苗継ぎ等のために植付部に対して、左右スライドする苗載せ台を一方側端で停止させる端寄せモードへの切換えを、スムーズに行うことができる移植機を提供する。
【解決手段】苗載せ台14から苗を掻きとって圃場に植付ける植付部16、及び苗載せ台を植付部に対して左右往復移動させる横送り機構を有する植付作業機7と、植付作業機への動力を断続させる植付クラッチと、植付作業機の昇降及び植付クラッチの断続を操作する作業機操作具と、横送り機構を介して植付部に対する苗載せ台の左右動を制御する制御部11とを備え、該制御部が苗載せ台を左右の一方側端で停止させる端寄せモードを有する移植機において、作業機操作具の操作に優先して植付作業機の昇降を停止させる昇降停止操作具を備え、該昇降停止操作具の操作に基づく植付作業機の昇降高さ固定に起因して、端寄せモードへの切換えを行うように制御部を構成する。
(もっと読む)
乗用型田植機における走行操作装置
【課題】エンジン7にて駆動の走行車輪5,6を有する走行機体2と,後部に装着される苗植え装置3と,前記走行車輪に対する走行変速ミッション8と,前記走行機体における運転操作部9に設けた変速ペダル12とから成る乗用型田植機において,その走行速度の変速操作の容易性を図る。
【解決手段】前記走行変速ミッションを変速操作するアクチエータ28と,前記変速ペダルの踏み込み操作及び踏み込み解除操作を検出する検出手段24とを備え,前記アクチエータ28は,前記検出手段による前記変速ペダルにおける踏み込み操作の検出にて前記走行変速ミッションを増速に作動し,前記検出手段による前記変速ペダルにおける踏み込み解除操作の検出にて前記走行変速ミッションを減速に作動する。
(もっと読む)
田植機
【課題】 植付部及び施肥部の複数条毎の駆動の入切を行うユニットクラッチを備えた田植機において、ユニットクラッチの入切操作による欠株の発生を防止する。
【解決手段】 苗植付爪の駆動の入切を行う苗植付爪ユニットクラッチ(49)(50)(51)と、苗載台の苗縦送りの入切を行う苗縦送りユニットクラッチ(58)(59)(60)と、施肥部の肥料の繰出しの入切を行う施肥ユニットクラッチ(64)(65)(66)とを設けると共に、苗載台(16)の左右移動端を検出する苗台検出部材(114)(115)を設け、該苗台検出部材(114)(115)の検出に基づいて各ユニットクラッチ(49)(50)(51)・(58)(59)(60)・(64)(65)(66)の入切を行うように構成した。
(もっと読む)
作業車両
【課題】農業用車両の各種センサは、他の作業車両と異なり、通常、発生するセンサ故障の他に、泥土や泥水、更には藁屑等の影響を受けて起こるセンサ故障も多く、消費材センサが正常に機能しない場合、補給を促す報知(警報)ができない課題があった。
【解決手段】この発明は、農業用の消費材を、搭載した農業用作業車両において、走行時間と、走行距離と、作業時間と、作業面積との各計測項目の少なくとも1項目を計測する装置(3)と、消費材の残量を検出する消費材センサ(4)とを設け、制御手段(5)は、消費材の残量が設定量以下になると告知装置(6)を作動させると共に、消費材センサ(4)が正常に機能しない場合、計測装置(3)から入力される計測情報に基づき、消費材の残量が設定量以下になったと同等の計測値に達すると、告知装置(6)を作動させる構成とした農業用作業車両としている。
(もっと読む)
水田作業機
【課題】 機体の後部に水田作業装置を昇降自在に支持し、水田作業装置に対地作業装置を備えた水田作業機において、水田作業装置が設定高さから下降側に変位した場合、対地作業装置が田面の泥を押してしまう状態を少なくする。
【解決手段】 水田作業装置の田面Gからの高さを検出する高さセンサー68と、高さセンサー68の検出値に基づいて水田作業装置を田面Gから設定高さに維持するように昇降駆動する昇降制御手段とを備える。水田作業装置5に対地作業装置53を昇降自在に支持し、対地作業装置53を水田作業装置に対して昇降駆動する昇降機構56を備える。水田作業装置が設定高さから下降側に変位すると、昇降機構56を対地作業装置53の上昇駆動側に作動させる上昇手段を備える。
(もっと読む)
乗用型作業機
【課題】旋回制御モードの設定時にブレーキ装置が作動する場合の不具合を解消することができる乗用型田植機を提供すること。
【解決手段】作業車両1が旋回内側の後輪7のクラッチIを切って動作で旋回する時には昇降用リンク装置2を作動させて自動的に苗植付装置3を上昇させ、前記旋回後に直進する時には自動的に苗植付装置3を苗植付け位置に下降させる旋回制御モードを設定しているときに、旋回内側の後輪7のブレーキ装置Jが作動すると、旋回制御モードにおける昇降用リンク装置2による苗植付装置3を苗植付け位置に下降させる作動を禁止して苗植付装置3の破損などを防止する制御を行う制御装置170を設けた乗用型田植機である。
(もっと読む)
苗移植機
【課題】 スイッチ(操作手段)の操作に基づいて苗植付部を苗補給がし易い所定の上下位置まで上昇又は下降させる構成の乗用型田植機においては、苗植付部の苗載台へ苗補給をするときにスイッチ(操作手段)の操作を格別に行わなければならず、作業性を低下させるおそれがある。また、植付作業走行中に、誤って前記スイッチ(操作手段)を操作すると、苗植付部が所定の上下位置まで上昇又は下降してしまって、苗植付が行えずに圃場に未植付区域が生じるおそれがある。
【解決手段】 走行車輌の走行を停止させる操作をするための走行停止手段と、該走行停止手段により走行停止操作が行われたことを検出するペダル保持アームセンサ(96)とを設け、該ペダル保持アームセンサ(96)による走行停止操作の検出に基づいて昇降機構を作動させて苗植付部を所定の上下位置まで上昇又は下降させる制御装置を設けた。
(もっと読む)
乗用田植機の苗警報装置
【課題】機体重量が後方バランスとなっている場合の畦越え操作を防止する乗用田植機の警報装置を提供することを課題とする。
【解決手段】走行機体3の車輪1,2に駆動力を入り切り自在に伝動し、降車して機体前方から操作可能なクラッチと、走行機体3後部に連結され苗載せ台4を有する植付作業機6と、走行機体3前部に設けられ走行機体3外部から走行機体3の前部を押し下げ操作可能な地上操作具19とを備えた乗用田植機において、苗載せ台4上の苗の有無又は苗量を検出する苗検出部57と、地上操作具19の操作を可能にする準備操作を検出する操作検出部58と、上記苗検出部57と上記操作検出部58とによる検出動作に起因して苗載せ台4上の苗又は一定以上の苗量があることを警報する警報装置14,61を設ける。
(もっと読む)
移植機
【課題】植付に係る複数の作業装置を統括的に操作し、オペレータの負担を軽減し得るようにした移植機を提供する。
【解決手段】乗用田植機に対し、圃場端である枕地における作業にあっては、植付部、油圧制御装置、整地装置、或いはマーカ等の複数の作業部が同時に、枕地での制御状態となるように設定又は警報する1個の枕地スイッチ63を備えさせた。これにより、枕地での植付作業時に生じる複数の作業部の操作を1個の枕地スイッチ63によって統括的に行うことができる。
(もっと読む)
農作業機
【課題】 従来、走行車体の後進時に農作業装置が上昇するようになっているため、農作業装置の接地作業状態でのひきづりが発生し安全上に問題があった。本発明は、後進操作前に農作業装置を上昇させることによって、農作業装置のひきづりを防止し安全性を確保することにある。
【解決手段】 走行車体の後部に農作業装置を昇降可能に設け、前後進切替可能な操作レバー40の操作経路を一方向に延びる前後進中立経路41Nと、前後進中立経路に交差して接続される前進経路41F及び後進経路41Rとを備え、前進経路41Fと後進経路41Rとが前後進中立経路41Nに交差する位置を異ならせてクランク状に構成し、前後進中立経路41Nの後進経路41R側端部は、後進経路41Rと交差する位置を越える位置にあり、該位置には前記操作レバー40が操作されたことを検出する検出手段42の検出結果に基づいて農作業装置を上昇させる制御手段44を備える。
(もっと読む)
1 - 20 / 67
[ Back to top ]