
Fターム[2B074FA03]の内容
収穫機本体(コンバイン) (7,339) | センサーの種類 (93) | 距離センサー (7)
Fターム[2B074FA03]に分類される特許
1 - 7 / 7
収穫機
【課題】作物の上端部の高さに適切に対応して取入部の高さを調整可能な収穫機を提供する。
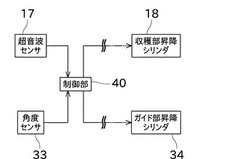
【解決手段】コンバイン(収穫機)は、本体と、取入部と、収穫部昇降シリンダ18と、を備える。取入部は、立毛状態の作物から必要部分を分離して取り入れる。収穫部昇降シリンダ18は、取入部を本体に対して昇降させる。本体は、作物の上端部を検出する超音波センサ17を備える。そして、収穫部昇降シリンダ18は、超音波センサ17の検出結果に基づいて、取入部を昇降させる。
(もっと読む)
コンバイン

【課題】走行機体の後方に存在する障害物を検出して、操縦者や周辺作業者に知らしめるバックソナー等の後方監視手段を備えたコンバインにおいて、圃場の畦際で後進する際や車庫入れのために後進する際、走行機体の後部と、その後方に存在する障害物が接触する直前まで後進操作を行わなければならない場合があり、この後進操作を操縦者が安全且つ確実に行えるようにする。
【解決手段】走行機体2に接近する障害物と走行機体2の距離に応じて、走行機体2の後進操作を操縦者や周辺作業者に知らしめる後進警報用ホーン16の警報出力周期を変化せしめるように構成した。
(もっと読む)
コンバイン
【課題】前進走行中にクローラ走行装置が溝や穴に落ち込む前に警報を出して走行を停止することで機体の転倒を防止する。
【解決手段】第1に、左右のクローラ走行装置(4,5)の前方位置で刈取装置(1)の下部に地面に向けて距離を測定する距離測定センサ(2,3)を設け、該距離測定センサ(2,3)が検出する測定距離が設定値から外れた場合にクローラ走行装置(4,5)の駆動を停止する構成とした。第2に、左右の距離測定センサ(2,3)を刈取装置(1)の下部で左右のクローラ走行装置(4,5)のそれぞれ前方位置に設け、左右両方の距離測定センサ(2,3)が検出する測定距離の差が所定値(B)以上になるとクローラ走行装置(4,5)の駆動を停止する構成とした。
(もっと読む)
コンバインの安全装置
【課題】コンバインと補助作業者の位置を平面的な地図上に表示することでコンバインと補助作業者の距離を認識し易くして作業の安全性を向上させる。
【解決手段】コンバイン11に備えたGPS受信装置2の地図情報で自機11の位置をディプレイ10の平面地図上に表示すると共に、コンバイン11の周辺の補助作業者16を感知してその補助作業者16までの距離を計測する計測手段Aからの情報で前記ディスプレイ10の平面地図上に補助作業者16を重ねて表示し、コンバイン11と補助作業者16が所定距離に接近すると警報すべくしてコンバインの安全装置を構成した。
(もっと読む)
作業車輌
【課題】雰囲気温度や湿度の影響を受けずに操縦者のストレスを緩和し、作業能率の向上および安全性の向上を図る。
【解決手段】第1に、操縦部(5)に搭乗した操縦者の発汗量を検出する発汗量検出手段(6)と、該発汗量検出手段(6)による検出結果が基準発汗量を超えた場合にストレス緩和手段(7,8)を作動させる制御手段(9)と、操縦部(5)における操縦者の雰囲気温度を検出する雰囲気温度検出手段(10)と、該雰囲気温度検出手段(10)による検出結果に応じて基準発汗量を補正する補正手段とを設ける。第2に、操縦部(5)における操縦者の雰囲気湿度を検出する雰囲気湿度検出手段(11)と、該雰囲気湿度検出手段(11)による検出結果に応じて基準発汗量を補正する補正手段とを設ける。
(もっと読む)
作業車両
【課題】コンバインやトラクタ及び田植機等のように、着脱可能または一部の連結を外して作業位置と非作業位置とに位置変更可能な作業機部を備えた作業用走行車両の制御部において、当該作業機部の着脱により制御部に備えるEEPROMに無意味なエラー情報が記憶されてしまう不具合を解消する。
【解決手段】作業機部16に具備する作動用アクチュエータ22の動作状態を検出する検出手段43と、該検出手段43によるエラー情報を記憶する記憶手段42と、走行機体13に作業機部16が連結されていることを判断する判断手段44,45,46,47,48とを設けた作業用走行車両11の制御部41を構成し、前記判断手段44,45,46,47,48により走行機体13に作業機部16が連結されていることを判断した時のみ、検出手段43によるエラー情報を記憶手段42に記憶できるようにした。
(もっと読む)
コンバインの刈取装置
【課題】刈取ユニットの切断性能及び搬送性能を安定させ、刈取効率を向上させる。
【解決手段】左右一対の上搬送ケース42・42及び下搬送ケース43・43と、その下方に配設する回転刈刃44とを刈取ユニット40として、左右に複数並設してなるコンバインの刈取装置6において、刈取ユニット40をプラットホーム31に平行リンク84・85を介して連結するとともに、該刈取ユニット40の対地高さ検出手段79を回転刈刃44の後方に設け、該対地高さ検出手段79の検出値に基づいて刈取ユニット40を設定された対地高さへアクチュエータ88により昇降させるように構成した。
(もっと読む)
1 - 7 / 7
[ Back to top ]