
Fターム[2B075JD20]の内容
収穫機本体(特定作物用) (1,318) | 果実、野菜等の摘み取り (132) | 駆動 (7)
Fターム[2B075JD20]に分類される特許
1 - 7 / 7
果実の果柄切断機および果柄切断方法、並びに果柄切断装置

【課題】駆動源を必要としない簡単な構成を有し、果実を傷つけることなく確実に果柄を切断可能な果実の果柄切断機および果柄切断方法、並びに果柄切断装置を提供する。
【解決手段】果実の果柄を切断する果実の果柄切断機1であって、平行な一対の支軸20を中心に回動し、刃先22が互いに対向して配置された一対の刃部2と、一対の刃部の下方に配置され、刃先の下側可動範囲を決定する下側ストッパ部3と、一対の刃部の上方に配置され、刃先の上側可動範囲を決定する上側ストッパ部4とを備え、下側ストッパ部3は、一対の刃先22間の開口幅が果実の肩幅より小さく且つ果柄径より大きくなる位置で刃先22を支持するように配置されており、下側ストッパ部3により支持された一対の刃先22間に果柄が挿入され、果柄が上方に引き上げられることにより果実の肩部と接触する一対の刃部2が上方に回動して果柄を切断するようにした。
(もっと読む)
アスパラガスの収穫ストック付きの収穫用ハサミ

【課題】 食用のアスパラガスの若芽を収穫する際に、立ち姿で収穫可能とした収穫ハサミを提供する。
【解決手段】 駆動機構3aを在する後端部の操作桿4を有する駆動部3と、駆動部3から駆動力を前端に伝える作動ワイヤー7を有する管状操作棒6と、管状操作棒6の前端の切断ハサミ9と、管状操作棒6のと切断ハサミ9の可動刃9bと固定刃9cの上の囲み板8aからなるストック部8と、ストック部8の先端に設けられ、切断ハサミの左右の可動刃9bと固定刃9cの開閉と連動して開閉する左右の可動保持板10aと固定保持板10bと、ストック部8の囲み板8aの上辺と平行に設けた囲み板8aの上辺部8cの下端の支軸8bと、支軸8bの周りに跳ね上げ得る囲み板8aの下辺部8dと、切断ハサミ9の刃の大きさをアスパラガスの隣接間よりも小さくした細刃9aからなるアスパラガスを収穫する立ち姿勢用の収穫用ハサミ1。
(もっと読む)
自動収穫装置
【課題】葉等に隠れた状態の果実であっても自動的に収穫することができる自動収穫装置を提供する。
【解決手段】自動収穫装置1は、収穫すべき果実(例えば、リンゴの実)が生る農作物(例えば、リンゴの木)を撮影する画像センサ15と、画像センサ15で撮影された画像から特定される果実を収穫するマニピュレータ14と、画像センサ15によって撮影が行われている状態で、農作物の葉を揺動させる送風機12と、送風機12が農作物の葉を揺動させているときに画像センサ15で撮影される複数の画像に対して所定の画像処理を行い、葉に隠れた果実を特定する画像処理装置を有するコントローラ18とを備える。
(もっと読む)
葉菜収穫機
【課題】収穫作業の中途でバッテリの充電をエンジンから簡単に行なうことができると共に、収穫機の軽量化及び運転性の向上を図ることができる葉菜収穫機を提供する。
【解決手段】走行装置5を有する走行機体2に、圃場に植生する葉菜作物を前方下部から後方上方に向けて搬送する搬送部9を後傾斜状に設け、該搬送部9の後方に排出供給される作物を収容する回収部36と操縦用のハンドル4aを配設すると共に、走行装置5の後部側にバッテリ7を載置し、該バッテリ7の電力によって走行装置5及び搬送部9等を駆動する収穫機1であって、前記走行機体2に、ハンドル4aが設置される側の搬送部9の前部側方にエンジン13を配設し、該エンジン13によって発電機14を駆動することにより、発電した電力をバッテリ7に充電することできる。
(もっと読む)
りんご、柑橘類、核果、及び同様の物体の摘み取り及び予備処理を改善する移動システム
りんご、柑橘類、核果等の摘み取り及び予備処理を改善する移動システムが、開示及び特許請求される。このシステムは、摘み取りステーション、気送管輸送サブシステム、任意選択的な物体走査サブシステム、任意選択的な不合格品転向サブシステム、任意選択的なラベリングサブシステム、及び不合格ではない物体を収納ビンに比較的丁寧に入れるサブシステムが取り付けられ得る移動シャシを備える。このシステムは、転向された物体を収納ビンに入れるサブシステムも含み得る。 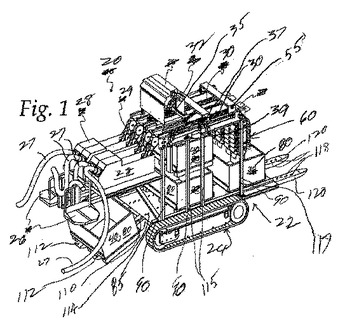 (もっと読む)
(もっと読む)
収穫ロボット
【課題】 果菜類の果実の色や形状に限定されることなく、収穫適期の果実を収穫することができる収穫ロボットを提供すること。
【解決手段】 果実を照明する照明装置、及び平行に設置された2台のカメラを備えた撮影手段と、摘み取り装置と、移動装置と、2台のカメラによって夫々撮影されたアナログの画像情報を取得してデジタル変換する画像入力ボード、該画像入力ボードがデジタル変換した画像情報を処理する画像処理アプリケーション、並びに、該画像処理アプリケーションにて処理された画像情報に基づいて前記撮影手段、摘み取り装置及び移動装置を制御する制御手段とを備えた画像処理手段とで構成され、前記画像処理アプリケーションは、デジタル変換されたカラー画像データをHSI値に変換して二値化し、その二値化によって絞り込んだ果実の領域から特徴量を判別することを特徴とする収穫ロボットとする。
(もっと読む)
作業機械
【課題】高所にある果実を、当該果実が不意に落下するのを防ぎながら容易に採取できるようにする。
【解決手段】本体機12に起伏可能にブーム24が連結され、このブーム24の先端に回動可能にアーム26が連結され、このアーム26の先端部に果樹採取装置40が取付けられる。果樹採取装置40は、果実を把持するために開閉するグリップ46と、果樹と果実との境界部分を切断するために開閉する鋏48と、これらグリップ46及び鋏48を支持する支持部材42〜44とを含み、この支持部材がアーム26の先端部に取付けられる。ブーム24、アーム26の少なくとも一方は伸縮可能であり、その伸縮により果実採取装置40の移送範囲が広げられる。
(もっと読む)
1 - 7 / 7
[ Back to top ]