
Fターム[2B075JF01]の内容
収穫機本体(特定作物用) (1,318) | 果実、野菜等の収穫ロボット (104) | 走行部;腕部 (10)
Fターム[2B075JF01]に分類される特許
1 - 10 / 10
果柄除去装置及び果実収穫装置

【課題】果柄の除去を容易にし、搬送中における果柄による果実の損傷を低減する。
【解決手段】上下動アクチュエータ60が、果柄の一部を把持する一対の第1フィンガ52a,52bを有する第1フィンガ部54と、第1フィンガ52a,52bに把持されている果柄を切断する一対の第2フィンガ152a,152bを有する第2フィンガ部154とを接近又は離間させ、第2フィンガ部が果実に接近したタイミングで、第2フィンガ部による切断を実行することで、第1フィンガ部により把持された果柄を、果実に近い適切な位置で切断する。
(もっと読む)
果実収穫装置

【課題】作業効率が高く且つ果実を傷めずに収穫可能な果実収穫装置を提供する。
【解決手段】栽培空間に複数の対象果実が吊下している果実の収穫装置1において、収穫装置は、鉛直方向に延設された支柱3にアーム機構が取り付けられ、アーム機構の先端に設けられた把持ハンド10で果実を把持して収穫するマニピュレータ2を備えており、アーム機構は、支柱3に第1の軸4を介して取り付けられ鉛直面内で屈曲する第1のアーム部5と、第1のアーム部5に第2の軸6を介して取り付けられ鉛直面内で屈曲する第2のアーム部7と、第2のアーム部7に第3の軸8を介して取り付けられ鉛直面内で屈曲する第3のアーム部9とを有する3軸のアーム機構であり、第3のアーム部9の先端に取り付けられた把持ハンド10が水平に維持されるように該第3のアーム部が駆動されるとともに、把持ハンド10と果実111との高さ方向及び奥行き方向の位置を合わせるように第1のアーム5部及び第2のアーム部7が駆動される構成とする。
(もっと読む)
果実収穫用エンドエフェクタ
【課題】本発明は、複雑な障害物の多い立体空間で、目標物を認識する機能を持ち、塾度の高い果実のみを選択して収穫することのできるロボットの果実収穫用エンドエフェクタを提供する。
【解決手段】左右旋回・上下移動・上下旋回・エンドエフェクタ(手首)6の左右振り・手首の回転の6つの自由度を有するマニピュレータ3と三次元視覚センサ4と、中央演算処理装置7と、を備えると共に前記マニピュレータ3に腕5を伸縮自在に設け、該腕5の先端部に、果実を収穫するため取り込むU字型金具11及びシュート12と果実の小果梗(W2)を押さえる小果梗押さえ14と該小果梗押さえ4を開閉駆動する第3の駆動手段M3と前記U字型金具11等を捻る第2の駆動手段M2と、前記二つの駆動手段やU字型金具11等を左右に振る第1の駆動手段M1とを備えた収穫用エンドエフェクタを設ける。
(もっと読む)
作物から葉を採取するための方法及び装置
葉(14)のような作物の部分を採取するための方法及び装置。この目的のために、前記作物には、視覚技術が、低い位置から近づけられ、主茎(12)とこの主茎から延びている部分とが、下方から観察される。観察されるイメージの数に基づいて、アームが、制御され、該当する柄(13)へと移動される。この移動は、原則として、前記柄に対して平行であり、低く近い位置から行われる。前記柄(13)に接近すると、前記柄(13)は、2つの回転部分(3)間の開口部内に位置される。前記柄は、回転によってはさまれ、前記柄は、前記アームに対して移動され、この結果、前記柄の切断位置が、前記アームへと操作される。そして、前記柄(13)は、切断され、前記葉は、所定の位置に配置される。 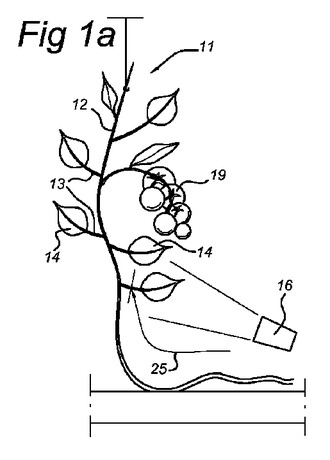 (もっと読む)
(もっと読む)
把持装置
【課題】複雑な制御を行うことなく、収穫対象果実を把持可能なハンド機構を提供する。
【解決手段】収穫対象のイチゴの−Z側に位置決めされるガイド16と、ガイド16に設けられ、Z軸に沿ってスライド移動するスライダ18と、スライダ18に設けられ、スライダ18の+Z方向への移動に伴って、ガイド16と一体的に構成されたストッパ12aと接触することにより、X軸回りに回転する第1回転部22Aと、第1回転部22Aにその下端部が固定され、第1回転部22Aの回転によりその上端部がイチゴに近づく方向に移動する第1フィンガー部24Aと、第1フィンガー部24Aの上端部とともに、収穫対象のイチゴを把持する第2フィンガー部24Bと、を備えている。
(もっと読む)
果実収穫装置及び果実収穫方法
【課題】収穫対象以外の果実による影響を受けることなく収穫対象果実を収穫することが可能な果実収穫装置を提供する。
【解決手段】収穫対象のイチゴを吸引して、位置を固定する吸引部14と、収穫対象のイチゴに隣接する隣接イチゴに対して、気体を吹き付けて、隣接イチゴを収穫対象のイチゴから離間させる第1気体噴出口126a、第2気体噴出口126b、第3気体噴出口126cと、位置が固定された収穫対象のイチゴを把持する第1フィンガー部24A、第2フィンガー部24Bと、を備える。
(もっと読む)
自動収穫ロボット用車両
【課題】 農作業を自動で担うために狭く段差などのある圃場内の無限軌道を快適に走行して効率よく旋回することが可能な自動収穫ロボット用車両を提供すること。
【解決手段】 圃場における農作業を自動で担うため、該圃場内の無限軌道を走行する自動収穫ロボット用車両であって、前車軸に装着されたタイヤ付ホイール型の操向可能な前輪と、後車軸に設けられて独立に駆動制御可能な左右一対のクローラ走行装置とを備え、該クローラ走行装置は、少なくとも、駆動力を有する駆動輪と、該駆動輪の回転に従動する従動輪と、該駆動輪及び従動輪に巻回される無端状クローラとからなり、上方の車両本体部に対して略垂直方向の回転軸によって水平方向に回転自在に連結されていることを特徴とする自動収穫ロボット用車両とする。
(もっと読む)
収穫ロボット
【課題】 果菜類の果実の色や形状に限定されることなく、収穫適期の果実を収穫することができる収穫ロボットを提供すること。
【解決手段】 果実を照明する照明装置、及び平行に設置された2台のカメラを備えた撮影手段と、摘み取り装置と、移動装置と、2台のカメラによって夫々撮影されたアナログの画像情報を取得してデジタル変換する画像入力ボード、該画像入力ボードがデジタル変換した画像情報を処理する画像処理アプリケーション、並びに、該画像処理アプリケーションにて処理された画像情報に基づいて前記撮影手段、摘み取り装置及び移動装置を制御する制御手段とを備えた画像処理手段とで構成され、前記画像処理アプリケーションは、デジタル変換されたカラー画像データをHSI値に変換して二値化し、その二値化によって絞り込んだ果実の領域から特徴量を判別することを特徴とする収穫ロボットとする。
(もっと読む)
柱状物の昇降装置
【課題】径が変化する木又は径の異なる複数の木にも対応でき、作業者が自ら高所での作業を行う必要がなく、しかも装置構成が簡単で持ち運びも便利な柱状物の昇降装置を提供する。
【解決手段】柱状物11の同一高さ位置で、柱状物11の外表面12周方向に間隔を開けて配置され、柱状物11の外表面12を上下方向に走行可能な2台以上の駆動車を含む複数の走行台車13〜16と、隣り合う走行台車13〜16を連結し、伸縮力によって各走行台車13〜16を柱状物11の外表面12に押し付ける弾性部材17とを有する。
(もっと読む)
作物収穫装置
【課題】
作物の像を撮影する第1撮影手段と、作物を摘み取って保持するところの収穫手段が保持している作物の像を第1撮影手段とは異なる方向から撮影する第2撮影手段とを設け、これらの各撮影手段の撮影結果に基づいて作物を選別することにより、作物の収穫時に該作物を選別するに際して、その選別、判定の精度向上を図ることができる作物収穫装置の提供を目的とする。
【解決手段】
作物の像を撮影する第1撮影手段50と、作物を摘み取り、かつ保持して移送する収穫手段Aと、上記収穫手段Aが保持している作物の像を上記第1撮影手段50とは異なる方向から撮影する第2撮影手段53とを備え、上記第1および第2の各撮影手段50,53の撮影結果に基づいて作物を選別することを特徴とする。
(もっと読む)
1 - 10 / 10
[ Back to top ]