
Fターム[2B076BA07]の内容
収穫機本体(機枠、駆動) (12,770) | 機枠、機台に関する目的、効果 (1,380) | 操作性の向上 (456)
Fターム[2B076BA07]に分類される特許
1 - 20 / 456
作業車輌における操作レバーの案内構造
コンバイン
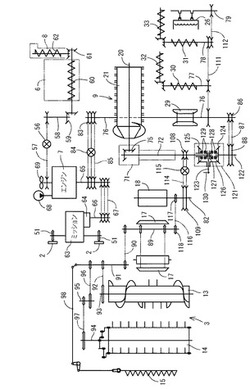
【課題】刈取装置または脱穀装置などの機体レイアウトを機能的に構成できるものでありながら、刈取装置または脱穀装置の組付け作業性またはメンテナンス作業性などを向上できるようにしたコンバインを提供する。
【解決手段】プラットホームオーガ13及びフィーダハウスを設ける刈取装置3と、扱胴21及び穀粒選別機構を有する脱穀装置9と、走行部2及びエンジン7を設ける走行機体1を備え、刈取装置3から脱穀装置9に穀稈を供給するコンバインであって、エンジン7の出力軸65に脱穀クラッチ84を介して連結する唐箕軸76と、刈取装置3と扱胴21を駆動するカウンタ軸72を設ける構造であって、唐箕軸76の回転駆動力を入力する正逆転切換ケース121を設け、正逆転切換ケース121に設けた正逆転伝達軸122にカウンタ軸72を連結させる。
(もっと読む)
汎用コンバイン

【課題】リール回転自動制御を制御部に設けた汎用コンバインにおいて、作物が倒伏している場合でも、迅速的且つ効率的な刈取作業を行うことが可能な汎用コンバインを提供する。
【解決手段】作物を掻込むように回転駆動されるリールの回転速度を変速するリール変速装置と、リールの回転速度を変速操作するリール変速手動操作手段81と、リールを昇降させるリール昇降アクチュエータ41と、リールを昇降操作するリール昇降手動操作手段74A,74Bと、車速を検出する車速検出手段97とを備え、車速に連動してリールの回転速度を制御するリール回転自動制御を制御部83に設けた汎用コンバインであって、倒伏刈制御を制御部83に設け、倒伏刈制御を実行する倒伏刈操作手段71を備え、制御部83は、倒伏刈操作手段71によって倒伏刈制御が行われた場合には、リール昇降アクチュエータ41により自動的にリールを最下げ位置に移動制御する。
(もっと読む)
コンバイン
【課題】排出オーガが排出作業の状態であると判断手段により判断されると脱穀クラッチを切断して脱穀部を停止する脱穀部を備えたコンバインを提供する。
【解決手段】穀粒排出クラッチ検出手段で穀粒排出クラッチの断接状態を検出し、穀粒排出クラッチの接続状態が穀粒排出クラッチ検出手段により検出されて、排出オーガ作動状況判断手段によって、排出オーガが作動状態であると判断されると、クラッチ操作装置によって脱穀クラッチが切断されて脱穀装置7が停止する。
(もっと読む)
汎用コンバイン
【課題】リールが上下移動駆動可能に支持された刈取部を、走行機体に昇降駆動可能に連結し、リール昇降アクチュエータによりリールを自動的に下降させるオートリフト制御の実行時、リールが穀稈に作用する前に刈取部が上昇してしまうことにより生じる稈こぼれを防止し、穀稈を適切に掻込みながら刈取部を自動的に上昇駆動させる汎用コンバインを提供する。
【解決手段】オートリフト制御でリールの刈取部に対する相対高さを検出する高さ検出手段91を設け、制御部83はオートリフト操作手段73によるオートリフト制御の実行時、高さ検出手段91により検出されたリール高さが予め定めた所定高さ以下でない場合にはリールを刈取部に対して下降駆動させるとともに刈取部を低速で上昇駆動させる一方で、高さ検出手段91による検出されたリール高さが上記所定高さ以下の場合にはリールを刈取部に対して下降駆動させるとともに刈取部を高速で上昇駆動させる。
(もっと読む)
汎用コンバイン
【課題】リール回転自動制御を制御部に設けた汎用コンバインにおいて、低速走行時でも、稈こぼれが発生することなく、迅速且つ効率的な刈取作業を行うことが可能な汎用コンバインを提供する。
【解決手段】作物を掻込むように回転駆動されるリールの回転速度を変速するリール変速装置と、変速操作するリール変速手動操作手段81と、車速検出手段97とを備え、車速に連動してリールの回転速度を制御する汎用コンバインであって、車速に関係無くリールを所定速度で回転させる強制掻込制御を制御部83に設け、強制掻込制御を実行する強制掻込操作手段69を備え、制御部83は、強制掻込操作手段69によって強制掻込制御が行われている最中は、リール回転自動制御を解除して強制掻込制御を実行する一方で、強制掻込操作手段69による強制掻込制御が解除された際には、強制掻込制御を解除してリール回転自動制御に復帰する。
(もっと読む)
汎用コンバイン
【課題】リールが上下移動駆動可能に支持された刈取部を、走行機体に昇降駆動可能に連結した汎用コンバインにおいて、リールを一時的に下降させることが容易で、作業効率が良好な汎用コンバインを提供する。
【解決手段】刈取部を昇降させる刈取部昇降手動操作手段と、リールを刈取部に対して昇降させるリール昇降手動操作手段74A,74Bと、制御部83を備え、リールを刈取部に対して最下げ位置まで下降駆動させるリール強制下降制御を制御部83に設けるとともに、リール昇降手動操作手段74A,74Bとは別にリール強制下降操作手段73を設け、制御部83は、リール強制下降操作手段73による操作中はリール強制下降制御を実行する一方で、リール強制下降操作手段73による操作が解除された場合にはリールを元の昇降高さに自動的に復帰させる。
(もっと読む)
コンバイン
【課題】揺動選別棚上の処理物の後方移送能力を高めて脱穀選別作業の能率を高めると共に、処理物中の穀粒の漏下を促進して穀粒回収率を高める。
【解決手段】走行装置(2)を備えた機体(1A)の前部に刈取装置(4)を設け、該刈取装置(4)の後側には脱穀装置(3)を設け、刈取装置(4)および脱穀装置(3)を駆動するエンジン(E)を設けたコンバインにおいて、脱穀装置(3)に備えた扱室(11)の下方に揺動選別棚(20)を設け、揺動選別棚(20)の前部下方には選別風送風用の唐箕(16)を設け、揺動選別棚(20)上の処理物の量を検出する処理物量検出センサ(95)の検出結果に基づいてエンジン(E)の回転速度を自動的に変速する制御装置(PU)を設ける。
(もっと読む)
走行車両
【課題】走行機体の前後左右の傾斜姿勢を車高操作具や傾斜操作具の手動操作で変更するにおいて、これら操作具の手動操作を手軽に行えるようにする。
【解決手段】本願発明の走行車両は、左右の走行部2にて支持された走行機体1と、走行機体1の左右方向の傾斜姿勢を変更するローリングアクチュエータ38と、走行機体の前後方向の傾斜姿勢を変更するピッチングアクチュエータ177とを備える。走行機体1上にある運転座席12の前方に配置された操向操作具11と、操向操作具11を支持する操向コラム46とのうちいずれか一方に、走行機体1の車高を変更操作する車高操作具57を設け、他方に、走行機体1の傾斜姿勢を変更操作する傾斜操作具56を設ける。
(もっと読む)
走行車両
【課題】ローリングアクチュエータやピッチングアクチュエータを可動限界まで動作させて走行機体にねじれを生じさせたり、走行機体を極端な姿勢にしたりすることがなく、安定した姿勢制御を実現できる走行車両を提供する。
【解決手段】本願発明の走行車両は、左右の走行部2にて支持された走行機体1と、走行機体1の左右方向の傾斜姿勢を変更するローリングアクチュエータ38と、走行機体1の前後方向の傾斜姿勢を変更するピッチングアクチュエータ177と、各アクチュエータ38,177の駆動を制御するコントローラ371とを備える。コントローラ371には、走行機体1における各走行部2側の姿勢に関する一対の姿勢データML,MRを格納する。コントローラ371は、各アクチュエータ38,177による走行機体1の姿勢変更の可否を両姿勢データML,MRに基づき決定する。
(もっと読む)
コンバイン
【課題】刈取昇降レバーの操作と独立して掻込リールの下降操作をすることができ、刈取部と掻き込リールでの挟み込みをすることができるコンバインを提供すること。
【解決手段】
機体本体を変速操作する変速操作手段と、刈取部を昇降操作する刈取部昇降操作手段と、掻込リールを昇降操作するリール昇降操作手段と、をそれぞれ単独で操作部に配設しているので、刈取昇降レバーの操作と独立して掻込リールの下降操作をすることができ、刈取部と掻き込リールでの挟み込みをすることができる。そして、刈取部と掻き込リールでの挟み込みをすることで刈り終い時の穀稈が刈取部から脱落するのを防ぐ効果を有する。
(もっと読む)
コンバイン
【課題】左右走行部2を均等に制動でき、左右走行部2の誤動作を低減でき、左右走行部2の制動性能を向上できるようにしたコンバインを提供しようとするものである。
【解決手段】刈取装置3と、脱穀装置9と、エンジン7を搭載した走行機体1を備え、走行機体1に左右走行部2を装設すると共に、エンジン7によって走行油圧ポンプ65を作動させ、走行油圧ポンプ65にて左右走行油圧モータ69を駆動する一方、左右走行油圧モータ69に左右ブレーキをそれぞれ設けるコンバインにおいて、左右ブレーキ機構297をそれぞれ制動する左右ブレーキレバー296と、ブレーキ操作具38にブレーキワイヤ278を介して連結するブレーキ操作用のスタビライザ体286を備え、ブレーキ操作用のスタビライザ体286にて左右ブレーキレバー296を均等に牽引可能に構成したものである。
(もっと読む)
コンバイン
【課題】刈取部が接地した場合であっても刈取部が地中に突き刺さってしまう前に刈取部を上昇させることができるコンバインを提供する。
【解決手段】コンバインは、刈取部4を昇降させる油圧シリンダ9と、刈取部4の接地を検出する接地式刈高さセンサ90と、接地式刈高さセンサ90の検出結果に基づいて、油圧シリンダ9を駆動させて刈取部4の上昇制御を行う制御装置70と、を備え、刈取部4が接地した際の走行速度vが第二設定速度V2以上の場合、制御装置70は、刈取部4の上昇速度を速くする制御を行う。
(もっと読む)
コンバインの運転部
【課題】信号チェッカーとマイクロコンピュータとを別ユニットで構成しているため、部品点数が増加すると共にそれぞれに対して防水性及び防塵性を確保しなければならず、必然的にコストが上昇するという課題があった。
【解決手段】マイコンケース(52)の表示面(58)が、ステップカバー(37)のステップ面とは反対側の面に位置するように、制御ユニット(42)をステップカバー(37)の下面に支持し、ステップカバー(37)が閉鎖状態の時には、制御ユニット(42)がステップフレーム(36)内に収納されると共に、ステップカバー(37)が開放状態の時には、制御ユニット(42)がステップフレーム(36)外に突出することで、メンテナンス用表示部(55)が運転シート(22)に着座するオペレータから容易に視認できることを特徴とする。
(もっと読む)
コンバイン
【課題】
グレンタンク容積を拡大し、操縦席の製造コスト低減を低減する。
【解決手段】
走行車台(1)の前部に操縦部(3)を設け、該操縦部(3)の後方にグレンタンク(5)を設けたコンバインにおいて、前記操縦部(3)には操縦者が着座する座面部(10)を設け、前記グレンタンク(5)の前側上部に前記操縦部(3)側へ膨出する前側膨出部(5a)を形成し、該前側膨出部(5a)には、前記座面部(10)に着座した操縦者の上体を支持するシートバック部(5e)を形成し、シートバック部(5e)は、平面的に形成された背もたれ面部(5c)と、該背もたれ面部(5c)の左右に夫々偏倚し、背もたれ面部(5c)よりも前側に張出したサイドサポート部(5b,5b)とを備える。
(もっと読む)
コンバインの油圧制御回路
【課題】油圧制御回路を改良することで、過負荷の刈り取り作業中であっても刈取装置の昇降制御をスムースに行えるようにする。
【解決手段】刈取装置(10)を昇降する刈取昇降シリンダ(11)に送る圧油を制御する刈取昇降バルブ(12)に、刈取昇降シリンダ(11)からの戻り圧油を止めるパイロット逆止バルブ(65)を設けたコンバインの油圧制御回路において、パイロット逆止バルブ(65)を強制的に開放して逆止状態を解除する手動刈取降下手段(A)を設ける。また、パイロット逆止バルブ(65)への圧油供給を停止した後に、手動刈取降下手段(A)によってパイロット逆止バルブ(65)を開放して逆止状態を解除する構成とする。また、手動刈取降下手段(A)を、手動操作でパイロット逆止バルブ(65)のパイロット逆止バルブ(65)を開放する方向に押すプッシュピン(84)とする。
(もっと読む)
コンバイン
【課題】植立穀稈に対するデバイダの相対的な位置関係を適正に設定して刈取作業を行えるコンバインを構成する。
【解決手段】刈取部3に備えたデバイダ10と植立穀稈との左右方向での相対的な位置関係を示す参照情報を表示する表示部Vをフロントパネル16の上面に備えた。参照情報は、植立穀稈とデバイダ10とを運転者が見た姿をシンボル化したイメージであり、表示部Vが、運転部の運転者が既刈側の右デバイダ10Rを直線的に見通す領域の下側に配置されている。
(もっと読む)
コンバイン
【課題】ステアリングレバーを有する操作ボックスをコンパクトに構成することができるコンバインを提供する。
【解決手段】コンバインは、運転部と、運転部を覆うキャビンと、を備えている。操作ボックス6は、運転部のキャビンの右壁側に偏倚した位置に設けられている。操作ボックス6は、揺動支点Zを中心に揺動操作可能なステアリングレバー61を備え、ステアリングレバー61とキャビンの右壁との間に操作スイッチ62,63と、が備えられている。
(もっと読む)
コンバインの伝動構造
【課題】手間を掛けずに脱穀装置の回転速度の変更を行えるようにする。
【解決手段】エンジンからの動力を複数の被駆動機器Dに伝達する伝動手段を備えたコンバインの伝動構造において、伝動手段は、エンジンからの動力を受ける入力側プーリ86Aと、複数の被駆動機器Dのうちの脱穀装置3に動力を伝達する出力側プーリ86Bとを備えて構成され、入力側プーリ86Aと出力側プーリ86Bとの少なくとも何れか一方に、大径プーリ121のベルト巻回部121aと小径プーリ120のベルト巻回部120aとを同一面内に且つ同一回転軸心上に配置し、大径プーリ121を着脱自在に構成してある。
(もっと読む)
コンバインにおける穀粒排出用オーガの操作装置
【課題】コンバインにおいて操作性の向上を図れる穀粒排出用オーガの操作装置を提供する。
【解決手段】走行機体に備えられた穀粒排出用オーガの旋回並びに昇降を指令する手動操作式の指令スイッチ47,48と、穀粒排出用オーガの穀粒排出状態と穀粒停止状態とを切り替える揺動式の排出クラッチレバー45とを、運転座席13の横側の位置に配置された操作パネル27に設けてあるコンバインにおける穀粒排出用オーガの操作装置であって、操作パネル27は、第1操作パネル部27Aと、その前方で一段低く形成された第2操作パネル部27Bとを備えて構成してあり、排出クラッチレバー45は、第1操作パネル部27Aに前後に揺動自在に配置してあり、指令スイッチ47,48は、第2操作パネル部27Bの上面に配置してある。
(もっと読む)
1 - 20 / 456
[ Back to top ]