
Fターム[2B076EA02]の内容
収穫機本体(機枠、駆動) (12,770) | 駆動機構の自動制御 (620) | 1つの検出対象→複数の制御対象 (86)
Fターム[2B076EA02]に分類される特許
1 - 20 / 86
コンバイン
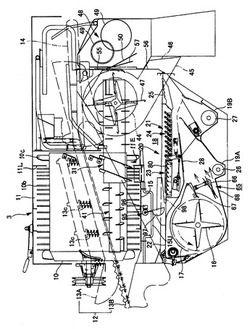
【課題】揺動選別棚上の処理物の後方移送能力を高めて脱穀選別作業の能率を高めると共に、処理物中の穀粒の漏下を促進して穀粒回収率を高める。
【解決手段】走行装置(2)を備えた機体(1A)の前部に刈取装置(4)を設け、該刈取装置(4)の後側には脱穀装置(3)を設け、刈取装置(4)および脱穀装置(3)を駆動するエンジン(E)を設けたコンバインにおいて、脱穀装置(3)に備えた扱室(11)の下方に揺動選別棚(20)を設け、揺動選別棚(20)の前部下方には選別風送風用の唐箕(16)を設け、揺動選別棚(20)上の処理物の量を検出する処理物量検出センサ(95)の検出結果に基づいてエンジン(E)の回転速度を自動的に変速する制御装置(PU)を設ける。
(もっと読む)
コンバイン

【課題】脱穀伝動ケースと刈取側連動ケースを一体としてコンパクト化し、支持・取付構成や伝動構成を簡略にして、製造コストの低減を図る。
【解決手段】車体(1)上に搭載した脱穀装置(2)の前側に刈取搬送装置(3)を配置し、刈取搬送装置(3)側の穀稈搬送装置(27)から穀稈を受け継いで搬送するフィードチェン(10)と受継ぎチェン(11)を設け、エンジン(5)からの回転動力を刈取搬送装置(3)と受継ぎチェン(11)とに分岐させて伝動する連動ケース(9)を設ける。また、連動ケース(9)の左外側面に、受継ぎチェン(11)への駆動軸(14)を配置する。また、動ケース(9)の左外側面に、刈取搬送装置(3)へ出力する伝動軸(15)を配置する。
(もっと読む)
作業機
【課題】様々な使用形態に応じて自由に使用することができると共に使用の制限もできるようにする。
【解決手段】トラクタ、バックホー、コンバイン、移植機などの作業機は、当該作業機を使用することができる残り時間を算出する残り時間算出手段40を備えている。また、この作業機は、残り時間が無くなると駆動部の動作を制限する動作制限手段41と、残り時間の延長を許可する許可信号Sが入力されると残り時間を延長する残り時間延長手段42とを備えている。
(もっと読む)
作業車輌
【課題】冷却用ファンの送風範囲内にファン用の変速装置が設けられることによる冷却効率の悪化。
【解決手段】エンジン10の駆動回転を無段階に変速して走行装置2を駆動する走行用無段変速装置11を備え、前記エンジン10の外側には、冷却用ファン20と、ラジエータ21と、防塵ネット37とを設け、前記冷却用ファン20はファン用無段変速装置30により正転および逆転駆動される構成とし、前記ファン用無段変速装置30には、前記走行用無段変速装置11の走行用ポンプ入力軸14を介してエンジン10の駆動回転を入力する構成としたことを特徴とする作業車輌。
(もっと読む)
脱穀装置及びこれを備えたコンバイン
【課題】緊急停止の際にフィードチェンが即時停止する脱穀装置を提供する。
【解決手段】フィードチェン1に対して脱穀時移送方向の動力を供給する正転駆動系と、フィードチェン1に対して脱穀時移送方向とは反対向きの動力を供給する逆転駆動系とを備え、脱穀時には、逆転駆動系による動力の供給を切った状態で、正転駆動系による動力をフィードチェン1に供給し、緊急停止時には正転駆動系による動力の供給を切った状態で又は正転駆動系による動力の供給を切らずにその動力に抗して、逆転駆動系による動力をフィードチェン1に供給してフィードチェン1を停止させる又は脱穀時移送方向とは反対向きに駆動する構成とする。
(もっと読む)
コンバイン
【課題】非刈取作業時に、揺動選別中の穀粒が機外へ飛散するのを抑制して、3番ロスを低減させる。
【解決手段】刈取部(3)が所定の非刈取作業高さまで上昇すると、刈取部(3)と脱穀フィードチェン(12)と揺動選別棚(17)の駆動が自動的に停止し、刈取部(3)が所定の刈取作業高さまで下降すると、刈取部(3)と脱穀フィードチェン(12)と揺動選別棚(17)の駆動が自動的に再開される構成とする。また、脱穀部(4)に脱穀後の処理物の量を検出する処理物量検出センサ(33)を設け、刈取部が非刈取作業高さまで上昇し、且つ、前記処理物量検出センサ(33)で検出される処理物の量が所定量よりも小さい場合に、脱穀フィードチェン(12)及び揺動選別棚(17)の駆動が自動的に停止する構成とする。
(もっと読む)
コンバインの操作制御装置
【課題】エンジンの始動状態から作業を行うときの操作の簡略化を図ることができる作業車の操作制御装置を提供する。
【解決手段】エンジンの出力にて駆動される走行装置及び作業装置と、エンジンの出力を作業装置に伝達する入り状態と伝達を遮断する切り状態とに切り換え自在な作業クラッチと、エンジンをアイドリング回転速度で回転させるアイドリング状態と定格回転速度で回転させる定格回転状態とに切り換えるアクセル手段とが設けられた作業車の操作制御装置であって、作業クラッチ及びアクセル手段を操作する操作制御手段と、作業開始指令を指令する手動操作式の作業指令手段とが設けられ、操作制御手段が、作業指令手段にて作業開始指令が指令されると、アクセル手段を定格回転状態に操作し且つ作業クラッチを入り状態に操作するように構成されている。
(もっと読む)
コンバイン
【課題】脱穀室から排出される被処理物が揺動棚上で絡まって、揺動選別棚上の被処理物の効率および精度が低下する。
【解決手段】走行装置2の上方に脱穀装置3を設け、走行装置2の前方に刈取装置5を設け、前記脱穀装置3は、扱胴20を軸装した脱穀室14の下方に唐箕22と該唐箕22からの送風により穀粒と異物とを選別する揺動選別棚24を設け、該揺動選別棚24の終端上方に前記唐箕22からの送風を吸引する吸引排塵ファン34を設け、該吸引排塵ファン34と前記脱穀室14の排出口48との間には左右方向の軸心を中心として駆動回転する拡散胴55を設け、該拡散胴55と前記脱穀装置3の脱穀室14に穀稈を供給搬送する穀稈供給搬送装置12とは走行速度に応じて回転速度を変更するようにしたコンバイン。
(もっと読む)
コンバイン
【課題】穀稈受け止め体の上下位置変更を良好に行えるように、電動モータの小型化ならびに低コスト化を図る。
【解決手段】穀稈受け止め体の姿勢を支持作用位置と支持解除位置との何れかに切換操作する単一の電動モータを備え、その電動モータに対して作動指令を出力する作動指令操作具の指令に基づいて、電動モータの一方向の回転作動にともなって穀稈受け止め体が支持解除位置に操作され、電動モータの逆方向の回転作動力によって穀稈受け止め体が支持作用位置に操作されるように構成してあり、電動モータの一方向の回動作動力によって力が蓄積され、電動モータの逆方向の回動にともなって穀稈受け止め体を持ち上げる側への操作力として蓄積された力を放出するように構成したアシスト機構60を備えた。
(もっと読む)
脱穀機
【課題】扱胴の駆動速度を変更可能にするための構造の複雑化を避けるとともに、装置の大型化も避けながら、扱胴の速度を変更可能にした脱穀機を提供する。
【解決手段】扱胴駆動用のアウターロータモータ3を、扱胴ドラム41の内部で、扱胴ドラム41を支持する扱胴軸42に装着し、このアウターロータモータ3の外側ロータ部分に、前記扱胴ドラム41に対して駆動力を伝達する駆動部材35を装着してある。
(もっと読む)
コンバイン
【課題】刈取部が地上面に突っ込んで損傷等されるという不具合の発生を回避すること。
【解決手段】左右一対の走行部間に昇降自在に架設した機体本体と、機体本体の前端部に昇降自在に取り付けた刈取部とを備えたコンバインにおいて、機体本体に設けた作業部のクラッチを切断させる作業終了操作と、機体本体を設定位置まで下降させる下降復帰制御と、刈取部を地上面に接地させないように地上高を制御する地上高制御とを連動させた。作業部のクラッチを切断させる作業終了操作を行うと、機体本体を設定位置(例えば、最下位置)まで下降させる下降復帰制御がなされるとともに、刈取部を地上面に接地させないように地上高を制御する地上高制御がなされる。
(もっと読む)
コンバイン
【課題】速やかにセルモータを介してエンジンを始動させて、作業を再開すること。
【解決手段】直進用無段変速機と旋回用無段変速機により駆動制御して直進走行と旋回走行とが行えるようにした走行部と、刈取部・脱穀部・選別部・排藁処理部等の作業部とを有して、これら走行部と作業部をエンジンからの駆動力により作動させるとともに、走行部と作業部に発生する過負荷の検出結果に基づいて、エンジンの停止信号を発信することでエンジンを停止させるように制御しているコンバインであって、直進用無段変速機が有する可動斜板は、エンジンの停止信号に連動して中立姿勢に強制的に復帰されるようにした。
(もっと読む)
コンバイン
【課題】穀粒量検出センサの出力から外乱の影響を除去することができるコンバインを提供する。
【解決手段】一番スクリューコンベア23の回転数に基づいて投口センサ23aの検出結果を補正することによって、投口センサ23aの検出結果から外乱の影響を抑制し、穀粒タンク4に貯留した穀粒量を精度良く検出することができる構成とした。また投口センサ23aは圧力センサである場合、圧力センサへ作用する穀粒からの圧力は、穀粒量が同じであっても、一番スクリューコンベア23の回転数によって異なるが、当該差異を補正することによって、投口センサ23aの検出精度を高めることができる構成とした。
(もっと読む)
コンバイン
【課題】圧力検出手段の検出結果及び穀粒量の関係を示す関数に、圧力検出手段の取付位置及び取付姿勢、並びに刈取る品種に応じた適切な係数を使用し、貯留部に貯留する穀粒量を正確に検出することができるコンバインを提供する。
【解決手段】投口センサ23aの検出結果及び演算して求めた穀粒量に基づいて未知係数を求めて、実関数を導出し、投口センサ23aの穀粒タンク4への取付位置並びに取付姿勢の差異、及び刈取る品種などの諸条件に応じた適切な実関数を穀粒量の検出に使用する構成とした。
(もっと読む)
コンバイン
【課題】搬送車輌への積み降ろし作業などが容易なコンバインを提供する。
【解決手段】作業切替ダイヤルが積載位置に切替えられると、制御部は積載モードへと切替る(タイミングl)。積載モードになると制御部は、エンジンの回転速度を、作業時に使用可能な回転速度域よりも低い設定低回転速度に設定すると共に、車高を最上げ位置に設定する。また、制御部は、前処理部を最下降位置に設定すると共に、ナローガイドも作業位置から収納位置へと切替える。
(もっと読む)
作業車
【課題】原動機部が過負荷状態に至る前に予備減速することで、原動機部の過負荷をできるだけ回避し作業能率を向上させる。
【解決手段】原動機部の負荷を検出する負荷検出手段と、負荷検出手段により検出される負荷検出情報に基づいて走行部の走行速度を自動的に制御する走行速度制御手段とを備え、走行速度制御手段は作業中に負荷検出情報から算出される原動機部負荷率が負荷率設定手段により予め設定した設定負荷率La以上である場合、過負荷と判断して、走行部の走行速度を強制的に減速して原動機部の過負荷状態を解消し、その後、元の走行速度に復帰させる制御を行う。また、記走行速度制御手段では設定負荷率Laに達する前に予備的に設定される予備設定負荷率Lcが設定負荷率Laに基づく所定の関係式から算出されて、原動機部負荷率が予備設定負荷率Lcに達した場合には、走行速度制御手段が走行部の走行速度を予備減速する。
(もっと読む)
コンバイン
【課題】刈取部の昇降操作や車体の操向操作を行うレバー操作具の把持部にスイッチ操作具を設け、オペレータの意図しない刈取部の昇降作動又は車体の操向作動を防止するコンバインを提供することを課題としている。
【解決手段】レバー操作具54の把持部側に設けたスイッチ操作具64と、レバー操作具54のレバー操作を検出するレバー操作検出手段72,73,74,76と、該レバー操作検出手段72,73,74,76の検出結果に基づいて刈取部4の昇降及び車体の操向制御を行う制御部60とを備えたコンバインにおいて、スイッチ操作具64の押し操作が検出されている際は、レバー操作検出手段72,73,74,76の検出結果に基づく刈取部4の昇降又は車体の操向を規制する規制制御を行うように前記制御部60を構成する。
(もっと読む)
コンバイン
【課題】作業待機時間をできる限り少なくしたコンバインを提供する。
【解決手段】マイコン40は、注油スイッチ32が入り操作されると、注油ポンプPを作動させて前処理部の駆動部に潤滑油を供給する。また、同時に強制再生装置82にも電気指令を出力し、燃料噴射インジェクタ83によって燃料をポスト噴射すると共に、この噴射された燃料に点火装置85によって点火する。これにより、注油作業と同時に、エンジンからの排出ガスが昇温され、排出ガスフィルタ80の再生作業が行われる。
(もっと読む)
コンバイン
【課題】本発明は、低速刈取走行時において前処理部を確実に駆動できると共に、穀稈の搬送乱れを防止できるコンバインを提供することを課題とする。
【解決手段】刈取部(5)を変速駆動する刈取駆動手段(51)と、刈取駆動手段(51)を制御する制御装置(64)とを設け、制御装置(64)に、車速に連動させて刈取駆動手段(51)を制御する車速連動駆動手段(B,C)を設けたコンバインにおいて、制御装置(64)に、機体の走行速度に関係なく刈取部(5)を低速(V1)で駆動するように制御する定速駆動手段(A)を設けると共に、車速連動駆動手段(B,C)から定速駆動手段(A)への駆動切換を行う切換操作具(30)を運転操作部(8)に設け、定速駆動手段(A)は、切換操作具(30)のON操作に基づき刈取部(5)を低速(V1)駆動に切り換えると共に、ON状態が維持されると、刈取部(5)を次第に増速するように構成した。
(もっと読む)
コンバイン
【課題】揺動選別装置の大型化、藁屑等の残留物の残留。
【解決手段】唐箕18の風量および/またはシーブ22の傾斜角度を多段階調節構成にする。車速センサ26からの車速検出値を直ぐに読み込まず、所定時間唐箕18の風量および/またはシーブ22の傾斜角度を調節せずに監視してから、車速センサ26の車速検出値を読み込み記憶し、この車速センサ26の車速検出値に応じて唐箕18の風量調節および/またはシーブ22の傾斜角度の調節を実行する。次に、一定時間経過すると、所定時間唐箕18の風量および/またはシーブ22の傾斜角度を調節せずに監視してから、車速センサ26の車速の検出値を読み込み、この今回記憶車速の検出値と前回記憶車速の検出値とを比較して唐箕18の風量および/またはシーブ22の傾斜角度を調節するコンバイン。
(もっと読む)
1 - 20 / 86
[ Back to top ]