
Fターム[2B076EA05]の内容
収穫機本体(機枠、駆動) (12,770) | 駆動機構の自動制御 (620) | 制御の優先順位 (74)
Fターム[2B076EA05]に分類される特許
1 - 20 / 74
汎用コンバイン
【課題】リールが上下移動駆動可能に支持された刈取部を、走行機体に昇降駆動可能に連結し、リール昇降アクチュエータによりリールを自動的に下降させるオートリフト制御の実行時、リールが穀稈に作用する前に刈取部が上昇してしまうことにより生じる稈こぼれを防止し、穀稈を適切に掻込みながら刈取部を自動的に上昇駆動させる汎用コンバインを提供する。
【解決手段】オートリフト制御でリールの刈取部に対する相対高さを検出する高さ検出手段91を設け、制御部83はオートリフト操作手段73によるオートリフト制御の実行時、高さ検出手段91により検出されたリール高さが予め定めた所定高さ以下でない場合にはリールを刈取部に対して下降駆動させるとともに刈取部を低速で上昇駆動させる一方で、高さ検出手段91による検出されたリール高さが上記所定高さ以下の場合にはリールを刈取部に対して下降駆動させるとともに刈取部を高速で上昇駆動させる。
(もっと読む)
汎用コンバイン

【課題】リール回転自動制御を制御部に設けた汎用コンバインにおいて、低速走行時でも、稈こぼれが発生することなく、迅速且つ効率的な刈取作業を行うことが可能な汎用コンバインを提供する。
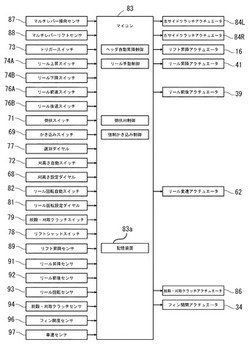
【解決手段】作物を掻込むように回転駆動されるリールの回転速度を変速するリール変速装置と、変速操作するリール変速手動操作手段81と、車速検出手段97とを備え、車速に連動してリールの回転速度を制御する汎用コンバインであって、車速に関係無くリールを所定速度で回転させる強制掻込制御を制御部83に設け、強制掻込制御を実行する強制掻込操作手段69を備え、制御部83は、強制掻込操作手段69によって強制掻込制御が行われている最中は、リール回転自動制御を解除して強制掻込制御を実行する一方で、強制掻込操作手段69による強制掻込制御が解除された際には、強制掻込制御を解除してリール回転自動制御に復帰する。
(もっと読む)
汎用コンバイン
【課題】リールが上下移動駆動可能に支持された刈取部を、走行機体に昇降駆動可能に連結した汎用コンバインにおいて、リールを一時的に下降させることが容易で、作業効率が良好な汎用コンバインを提供する。
【解決手段】刈取部を昇降させる刈取部昇降手動操作手段と、リールを刈取部に対して昇降させるリール昇降手動操作手段74A,74Bと、制御部83を備え、リールを刈取部に対して最下げ位置まで下降駆動させるリール強制下降制御を制御部83に設けるとともに、リール昇降手動操作手段74A,74Bとは別にリール強制下降操作手段73を設け、制御部83は、リール強制下降操作手段73による操作中はリール強制下降制御を実行する一方で、リール強制下降操作手段73による操作が解除された場合にはリールを元の昇降高さに自動的に復帰させる。
(もっと読む)
汎用コンバイン
【課題】リール回転自動制御を制御部に設けた汎用コンバインにおいて、作物が倒伏している場合でも、迅速的且つ効率的な刈取作業を行うことが可能な汎用コンバインを提供する。
【解決手段】作物を掻込むように回転駆動されるリールの回転速度を変速するリール変速装置と、リールの回転速度を変速操作するリール変速手動操作手段81と、リールを昇降させるリール昇降アクチュエータ41と、リールを昇降操作するリール昇降手動操作手段74A,74Bと、車速を検出する車速検出手段97とを備え、車速に連動してリールの回転速度を制御するリール回転自動制御を制御部83に設けた汎用コンバインであって、倒伏刈制御を制御部83に設け、倒伏刈制御を実行する倒伏刈操作手段71を備え、制御部83は、倒伏刈操作手段71によって倒伏刈制御が行われた場合には、リール昇降アクチュエータ41により自動的にリールを最下げ位置に移動制御する。
(もっと読む)
走行車両
【課題】手動操作によって走行機体の車高を昇降させる場合において、左右のローリングアクチュエータにかかる負荷の大小に拘らず、走行機体の左右傾斜角度をできるだけ一定に維持した状態で、走行機体の車高を昇降できるようにする。
【解決手段】現時点の左右の車高センサ375,376値の差ΔHxと昇降開始時の左右の車高センサ375,376値の差ΔHoとの間の差分の絶対値|ΔHx−ΔHo|が予め設定された第1昇降基準値C1を上回ると、先に移動方向に進んだ側のローリングアクチュエータ38を停止させ、他方のローリングアクチュエータ38の駆動を継続させる。
(もっと読む)
コンバイン
【課題】車速に同調して駆動する刈取部を備えながらも、機体を停止又は後退させた場合には、作業者の任意のタイミングで車速とは無関係に刈取部を駆動させることのできるコンバインを提供する。
【解決手段】
走行部を有して自走可能となした機体本体の前方に刈取部を連結し、機体本体の走行部に刈取部を連動連結して、刈取部の刈取速度と走行部の走行速度を同調させたコンバインにおいて、走行部を走行停止又は後退させた場合にも、刈取部を強制的に駆動させる刈取部強制駆動手段を設けているので、走行部を走行停止又は後退させた場合に車速とは関係無く掻き込みリールを回転させることができ、走行車体を後退させるときでも掻き込みリールにより穀稈を取り込むことができる。これにより、特に畦際での作業性を向上させることができる。
(もっと読む)
コンバイン
【課題】刈取部が接地した場合であっても刈取部が地中に突き刺さってしまう前に刈取部を上昇させることができるコンバインを提供する。
【解決手段】コンバインは、刈取部4を昇降させる油圧シリンダ9と、刈取部4の接地を検出する接地式刈高さセンサ90と、接地式刈高さセンサ90の検出結果に基づいて、油圧シリンダ9を駆動させて刈取部4の上昇制御を行う制御装置70と、を備え、刈取部4が接地した際の走行速度vが第二設定速度V2以上の場合、制御装置70は、刈取部4の上昇速度を速くする制御を行う。
(もっと読む)
コンバイン
【課題】オーガレストを非作業位置にした状態で、前処理部及びリールの両方を上昇駆動させると、排出オーガと干渉する。
【解決手段】オーガレスト9が、非作業位置にあることを検出し、かつリール11が上昇位置にあることを検出した場合、前処理部4の上昇を禁止する制御部38を備える。又は、オーガレスト9が、非作業位置にあることを検出し、かつ前処理部4が上昇位置にあることを検出した場合、リール11の上昇を禁止する制御部38を備える。
(もっと読む)
コンバイン
【課題】オペレータの精神的負担を軽減すること。
【解決手段】走行部の上方に運転部と脱穀部と選別部と穀粒貯留部を配設し、走行部の前方に刈取部を昇降自在に設けたコンバインにおいて、運転部に走行部を操作する操向手段を設けると共に、操向手段は、走行部を直接的に操作する操向手段本体と、操向手段本体に着脱自在に取り付けてオペレータが把持して走行部を間接的に操作する把持体と、把持体に設けてオペレータの把持した手の指先で操作する指先操作体とを具備し、把持体は操向手段本体から取り外すことで、指先操作体により走行部を遠隔操作可能な無線リモートコントローラとなした。
(もっと読む)
脱穀装置及びこれを備えたコンバイン
【課題】緊急停止の際にフィードチェンが即時停止する脱穀装置を提供する。
【解決手段】フィードチェン1に対して脱穀時移送方向の動力を供給する正転駆動系と、フィードチェン1に対して脱穀時移送方向とは反対向きの動力を供給する逆転駆動系とを備え、脱穀時には、逆転駆動系による動力の供給を切った状態で、正転駆動系による動力をフィードチェン1に供給し、緊急停止時には正転駆動系による動力の供給を切った状態で又は正転駆動系による動力の供給を切らずにその動力に抗して、逆転駆動系による動力をフィードチェン1に供給してフィードチェン1を停止させる又は脱穀時移送方向とは反対向きに駆動する構成とする。
(もっと読む)
コンバイン
【課題】畦際等で刈取部を上昇させても、特別な操作を要することなくこの畦際の穀稈を刈り取ることができるものとし、刈取作業の能率を高める。
【解決手段】刈取部(4)の非作業高さへの上昇が検出され且つ行車体(1)の所定速度よりも速い走行速度が検出された場合は刈取搬送装置(10)の駆動を無条件に停止させ、刈取部(4)の非作業高さへの上昇が検出されても所定速度以下の走行速度が検出された場合には、この検出の時点から刈取搬送装置(10)によって刈取後の穀稈が所定距離搬送されるまでの間または所定時間が経過するまでの間、刈取搬送装置(10)の駆動を継続した後に該刈取搬送装置(10)の駆動を自動的に停止させる刈取搬送制御装置(11)を設ける。
(もっと読む)
コンバイン
【課題】作物の収穫作業中であっても、燃料が高温となることでエンジンの作動不良が生じることを防止できるコンバインを提供する。
【解決手段】コモンレール式ディーゼルエンジン71を搭載したコンバインであって、前記ディーゼルエンジン71の回転及び機体の走行速度を制御する制御手段100と、走行速度Vを設定する変速操作手段94と、当該変速操作手段94の操作量Aを検出し前記制御手段100に送信する変速操作量検出手段94aと、前記制御手段100からの出力値を基に、前記変速操作手段94の操作量Aに対応する走行速度Vとする変速手段82aと、前記コモンレール754に供給される燃料の温度tを検出する燃料温度検出手段171と、を備え、前記制御手段100は、前記燃料の温度tが第一設定温度T1を越えると、前記操作量Aに対応する設定走行速度を低減することで走行速度Vを制限する制御をする。
(もっと読む)
脱穀機の揺動選別装置
【課題】選別処理物の揺動方向への流れをスムースにし、揺動による篩い選別が効果的に行えるようにする。
【解決手段】選別処理物の移送方向上手側から、移送棚(16)、第1シーブ群(17)、第2シーブ群(18)、ストロ−ラック(19)の順に設けた揺動選別棚(15)を、扱室(2)の下方に前後方向揺動自在に設け、該揺動選別棚(15)には、該揺動選別棚(15)の揺動方向に沿うプレート(28)と、第1シーブ群(17)のシーブ(26)面または第2シーブ群(18)のシーブ(27)面に接触して付着物を除去するスクレーパ(29)とからなる複数の清掃部材(30)を、該揺動選別棚(15)の揺動方向と直交する左右方向に互いに間隔をおいて設け、これら各清掃部材(30)を左右方向に往復揺動させる駆動機構(34,35,36,37,38,39,40)を設ける。
(もっと読む)
コンバインの自動エンジン回転制御装置
【課題】自動エンジン回転制御機能を備えたコンバインにおいて、この機能を停止した際にエンジン回転数の急激な変化を回避しながら低速回転数に移行させる。
【解決手段】刈取・脱穀クラッチセンサがクラッチ入り検出状態で且つ前記自動エンジン回転制御スイッチが入り状態から切り状態に切り換え操作されると、アクセルレバーを手動変更操作するまでの間はエンジン回転数を元のまま維持するように制御する機能を前記コントローラ及びエンジンコントローラにもたせる。
(もっと読む)
作業車
【課題】作業能率を良好に確保したまま、原動機部の過負荷制御を行うこと。
【解決手段】自走可能な走行部と作業を行う作業部とこれら走行部と作業部を駆動する原動機部とを備える作業車において、原動機部の負荷を検出する負荷検出手段と、負荷検出手段により検出される負荷検出情報に基づいて走行部の走行速度を自動的に制御する走行速度制御手段とを備えて、負荷検出手段が原動機部の過負荷を検出した場合には、走行速度制御手段が走行部の走行速度を強制的に減速して原動機部の過負荷状態を解消する制御を行う作業車であって、負荷検出手段によって検出される負荷検出情報を加工処理する情報加工処理手段と、情報加工処理手段が加工処理する負荷検出情報の加工処理度合いを強弱調節する強弱調節手段とを備えているを特徴とする。
(もっと読む)
コンバイン
【課題】刈取部の昇降操作や車体の操向操作を行うレバー操作具の把持部にスイッチ操作具を設け、オペレータの意図しない刈取部の昇降作動又は車体の操向作動を防止するコンバインを提供することを課題としている。
【解決手段】レバー操作具54の把持部側に設けたスイッチ操作具64と、レバー操作具54のレバー操作を検出するレバー操作検出手段72,73,74,76と、該レバー操作検出手段72,73,74,76の検出結果に基づいて刈取部4の昇降及び車体の操向制御を行う制御部60とを備えたコンバインにおいて、スイッチ操作具64の押し操作が検出されている際は、レバー操作検出手段72,73,74,76の検出結果に基づく刈取部4の昇降又は車体の操向を規制する規制制御を行うように前記制御部60を構成する。
(もっと読む)
コンバイン
【課題】揺動選別装置の大型化、藁屑等の残留物の残留。
【解決手段】唐箕18の風量および/またはシーブ22の傾斜角度を多段階調節構成にする。車速センサ26からの車速検出値を直ぐに読み込まず、所定時間唐箕18の風量および/またはシーブ22の傾斜角度を調節せずに監視してから、車速センサ26の車速検出値を読み込み記憶し、この車速センサ26の車速検出値に応じて唐箕18の風量調節および/またはシーブ22の傾斜角度の調節を実行する。次に、一定時間経過すると、所定時間唐箕18の風量および/またはシーブ22の傾斜角度を調節せずに監視してから、車速センサ26の車速の検出値を読み込み、この今回記憶車速の検出値と前回記憶車速の検出値とを比較して唐箕18の風量および/またはシーブ22の傾斜角度を調節するコンバイン。
(もっと読む)
コンバインの変速制御装置
【課題】コンバインの低速走行時における走行速度と刈取搬送部の回転変速を適正化する。
【解決手段】主変速レバーポジションセンサ(SE1)の検出値に応じて走行無段変速装置(15)及び刈取無段変速装置(19)を変速設定し、所定時間後に刈取変速モータ位置検出センサ(SE2)の検出値が設定値より高いときには、走行停止状態で刈取無段変速装置(19)を所定回転数で回転させる走行停止時刈取調整運転モードに移行し、刈取増速スイッチ(SW4)と刈取減速スイッチ(SW5)の操作により刈取無段変速装置(19)の回転数を増減設定するコントローラ(35)を備える。
(もっと読む)
コンバインの変速制御装置
【課題】
コンバインの発進時における刈取搬送部の駆動変速を適正化し、刈取作業を円滑に行なえるものとする。
【解決手段】
刈取自動変速入切スイッチ(SW1)を入りにすると、主変速レバーポジションセンサ(SE1)の検出値に応じて走行無段変速装置(15)及び刈取無段変速装置(19)の変速設定をし、所定時間後に刈取変速モータ位置検出センサSE2の検出値が設定値より低いときには、刈取無段変速装置(19)の刈取駆動速度に応じて走行無段変速装置(15)を減速変速する。また、検出値が設定値より高いときには、刈取無段変速装置(19)の駆動速度に応じた走行無段変速装置(15)の変速を停止するコントローラ(35)を設ける。
(もっと読む)
コンバイン
【課題】収穫作業の開始に伴い作業クラッチの入り状態に設定し、エンジン回転を定格回転速度に設定すると共に、エンジン回転を必要とする回転速度に容易に設定し得るコンバインを構成する。
【解決手段】作業クラッチレバー45が、切り位置OFFから収穫作業位置ONに操作された場合には、クラッチ制御手段87が脱穀クラッチCeと刈取クラッチCdとを入り状態に設定し、エンジン回転制御手段88は、アクセル設定ダイヤル47の設定位置に拘わらずエンジン回転を定格回転速度に設定する。この後、アクセル設定ダイヤル47が操作された場合にはエンジン回転制御手段88が、このアクセル設定ダイヤル47で設定された回転速度となるようにエンジン回転を制御する。
(もっと読む)
1 - 20 / 74
[ Back to top ]