
Fターム[2B076EC14]の内容
収穫機本体(機枠、駆動) (12,770) | 検出対象 (874) | 未刈穀稈の倒伏度 (4)
Fターム[2B076EC14]に分類される特許
1 - 4 / 4
汎用コンバイン
【課題】リール回転自動制御を制御部に設けた汎用コンバインにおいて、作物が倒伏している場合でも、迅速的且つ効率的な刈取作業を行うことが可能な汎用コンバインを提供する。
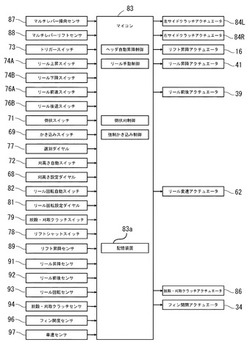
【解決手段】作物を掻込むように回転駆動されるリールの回転速度を変速するリール変速装置と、リールの回転速度を変速操作するリール変速手動操作手段81と、リールを昇降させるリール昇降アクチュエータ41と、リールを昇降操作するリール昇降手動操作手段74A,74Bと、車速を検出する車速検出手段97とを備え、車速に連動してリールの回転速度を制御するリール回転自動制御を制御部83に設けた汎用コンバインであって、倒伏刈制御を制御部83に設け、倒伏刈制御を実行する倒伏刈操作手段71を備え、制御部83は、倒伏刈操作手段71によって倒伏刈制御が行われた場合には、リール昇降アクチュエータ41により自動的にリールを最下げ位置に移動制御する。
(もっと読む)
コンバイン

【課題】車速が高速になるほど刈取部の駆動速度を高速にする一方で、走行停止が検出された場合には刈取部の駆動を停止する車速連動制御を行うコンバインにおいて、穀稈の押倒しを効率的に防止可能なコンバインを提供することを課題とする。
【解決手段】本発明は、走行機体3に連結された刈取部4と、刈取部4への動力を変速する変速装置46と、変速装置46を介して車速検出手段により検出された車速に刈取部4の駆動速度を連動させて、車速が高速になるほど刈取部4の駆動速度を高速にする一方で、走行停止が検出された場合には刈取部4の駆動を停止する車速連動制御を行う制御部58とを備え、傾斜角検知手段61により走行機体3の所定角以上の前傾斜が検出された場合には、車速検出手段により走行停止が検出された際にも、刈取部4が駆動するように制御部58を構成する。
(もっと読む)
コンバイン
【課題】エンジン始動時から作業時にわたり、運転業状態に応じた撮影情報をモニタに表示し、運転の容易化及び安全を確保する。
【解決手段】走行車体2の前側部に操縦部4を設け、刈取搬送部8の後方に脱穀選別部6を設けたコンバインおいて、刈取搬送部8の前側部を撮影するカメラ23aと、刈取搬送部8から脱穀選別部6への穀稈の引き継ぎ搬送部を撮影するカメラ23bと、機体の後方を撮影するカメラ23cとを設ける。そして、エンジン始動後の所定時間にわたり前記各カメラ23a,23b,23cの撮影情報を操縦部4のモニタに順次切り換えて表示する。
(もっと読む)
コンバイン
【課題】より正確に刈取る穀稈の倒伏状態を検知することが可能なコンバインを提供する。
【解決手段】倒伏センサ装置40は、超音波センサ41と上下位置調整手段44とで構成されており、超音波センサ41は、分草ガイド45を介して右端部の分草デバイダ16aの上方に取付けられている。また、該上下位置調整手段44は、電動モータ42及び連結ワイヤ43を備えており、該超音波センサ41を上下方向に調整可能に構成されている。刈取作業時においては、上下位置調整手段44により上下位置を調整しておくと共に、左右方向の左側に超音波を発信し、超音波センサ41の高さで分草デバイダの間を通過する穀稈からの反射波を検知する。その反射波の状態から穀稈の通過の規則的な場合、不規則な場合、不通過の場合が検知でき、これらの状態から穀稈の倒伏状態が正確に検知可能となる。
(もっと読む)
1 - 4 / 4
[ Back to top ]