
Fターム[2B076ED09]の内容
収穫機本体(機枠、駆動) (12,770) | 制御対象 (1,228) | 穀稈移送部駆動速度 (45)
Fターム[2B076ED09]に分類される特許
1 - 20 / 45
コンバイン
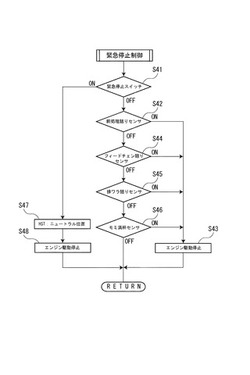
【課題】搬送経路で穀稈が詰まった場合には、停止操作手段によってフィードチェーンの駆動を早急に停止させたい場合でも、惰性によって、エンジン停止後の所定時間、フィードチェーンが搬送作動し続け、フィードチェーンを緊急停止できないという課題があった。
【解決手段】前処理部4と、フィードチェーン9と、穀稈の詰りを検出する詰り検出手段66,67,68,69と、エンジンの駆動停止操作を行う停止操作手段22と、エンジン停止手段76と、穀稈の詰り又は停止操作手段22の操作が検出された場合にエンジンを停止させる制御部60とを備えたコンバインにおいて、油圧式無段階変速装置43をニュートラル状態にすることによりフィードチェーンを駆動停止させる駆動停止手段74を設け、前記制御部60は、前記停止操作手段22が操作された場合には、エンジンを停止させ且つ駆動停止手段74によってフィードチェーン9を駆動停止させる。
(もっと読む)
脱穀装置及びこれを備えたコンバイン

【課題】緊急停止の際にフィードチェンが即時停止する脱穀装置を提供する。
【解決手段】フィードチェン1に対して脱穀時移送方向の動力を供給する正転駆動系と、フィードチェン1に対して脱穀時移送方向とは反対向きの動力を供給する逆転駆動系とを備え、脱穀時には、逆転駆動系による動力の供給を切った状態で、正転駆動系による動力をフィードチェン1に供給し、緊急停止時には正転駆動系による動力の供給を切った状態で又は正転駆動系による動力の供給を切らずにその動力に抗して、逆転駆動系による動力をフィードチェン1に供給してフィードチェン1を停止させる又は脱穀時移送方向とは反対向きに駆動する構成とする。
(もっと読む)
コンバイン
【課題】畦際等で刈取部を上昇させても、特別な操作を要することなくこの畦際の穀稈を刈り取ることができるものとし、刈取作業の能率を高める。
【解決手段】刈取部(4)の非作業高さへの上昇が検出され且つ行車体(1)の所定速度よりも速い走行速度が検出された場合は刈取搬送装置(10)の駆動を無条件に停止させ、刈取部(4)の非作業高さへの上昇が検出されても所定速度以下の走行速度が検出された場合には、この検出の時点から刈取搬送装置(10)によって刈取後の穀稈が所定距離搬送されるまでの間または所定時間が経過するまでの間、刈取搬送装置(10)の駆動を継続した後に該刈取搬送装置(10)の駆動を自動的に停止させる刈取搬送制御装置(11)を設ける。
(もっと読む)
コンバイン
【課題】脱穀室から排出される被処理物が揺動棚上で絡まって、揺動選別棚上の被処理物の効率および精度が低下する。
【解決手段】走行装置2の上方に脱穀装置3を設け、走行装置2の前方に刈取装置5を設け、前記脱穀装置3は、扱胴20を軸装した脱穀室14の下方に唐箕22と該唐箕22からの送風により穀粒と異物とを選別する揺動選別棚24を設け、該揺動選別棚24の終端上方に前記唐箕22からの送風を吸引する吸引排塵ファン34を設け、該吸引排塵ファン34と前記脱穀室14の排出口48との間には左右方向の軸心を中心として駆動回転する拡散胴55を設け、該拡散胴55と前記脱穀装置3の脱穀室14に穀稈を供給搬送する穀稈供給搬送装置12とは走行速度に応じて回転速度を変更するようにしたコンバイン。
(もっと読む)
コンバイン
【課題】発進時に走行ショック現象による走行安定性の低下。
【解決手段】刈取部4は専用の刈取搬送用静油圧式無段変速装置21により走行速度に同調して回転速度を変速駆動する。変速レバー70の操作位置を操作位置検出手段71を設け、該操作位置検出手段71の検出信号に応じて走行用静油圧式無段変速装置20を増減速制御する構成とし、走行速度を検出する車速センサ77を設け、該車速センサ77の検出信号に応じて刈取搬送用静油圧式無段変速装置21を増減速制御することで前記前記刈取部4と前側供給搬送装置13を走行速度に同調して変速駆動する構成とし、走行停止状態から変速レバー70の増速操作を開始した初期の走行速度の加速度合いよりも。変速レバー70の減速操作を開始した初期の走行速度の減速度合いの方が大きくなる設定としたことを特徴とするコンバイン。
(もっと読む)
コンバイン
【課題】コンバインの伝動構造を簡素化し、組立を容易化する。
【解決手段】脱穀装置(3)の前側に設けた刈取脱穀伝動ケース(4)と、走行ミッション装置(5)に設けた走行用HST(6)との少なくとも二系統の伝動経路(7,8)に回転動力を分岐して出力する構成とし、刈取脱穀伝動ケース(4)は、その内部において、脱穀装置(3)へ出力する伝動経路(9)を伝動上手側に形成し、伝動下手側には刈取用HST(10)を接続して伝動可能に構成し、該刈取用HST(10)と走行用HST(6)とを変速制御可能に構成し、刈取用HST(10)は、油圧モータ(10a)側から出力した動力を、刈取入力軸(11)とフィードチェン(12)の搬送始端部に接近させて設けた引継ぎチェン(13)とに分配して伝動する構成とする。
(もっと読む)
コンバイン
【課題】刈取る穀稈の量が急激に変化しても、扱深さセンサによる穀稈の穂先位置の検出を確実に行い、適正な扱深さを維持して良好な脱穀作業を行うことができるコンバインを提供する。
【解決手段】コンバインの前処理部20は、刈取った穀稈を搬送しつつ扱深さの調節を行う穀稈搬送装置44を備え、穀稈を刈取る前処理部20の掻込み体30、31に、搬送する穀稈の量を検出する供給穀稈量検出手段40を構成する第1条センサ41、第2条センサ42を設け、第1条センサ41が穀稈を検出し、第2条センサが穀稈を検出しないとき、穀稈搬送装置44の穀稈搬送速度を減速制御するようにした。
(もっと読む)
コンバイン
【課題】取部から受けた刈取穀稈を脱穀部に搬送するフィードチェーンの搬送速度を走行車速に対応して切替えることにより幅広い走行車速について安定した穀稈搬送を可能とするとともに、畦際に停車して穀稈の掻込みを行う場合についても安定した穀稈搬送が可能となるコンバインを提供する。
【解決手段】コンバインは、刈取部20から受けた刈取穀稈を脱穀部30に搬送するフィードチェーン33の搬送速度を走行車速に応じて制御する制御部Cを備えて構成され、この制御部Cには、走行停止時における掻込ペダル81の操作信号により、停車したまま刈取部20を駆動させて穀稈の掻込みを行とともに、フィードチェーン33を所定の搬送速度で動作させる連係機能を設けたものである。
(もっと読む)
コンバイン
【課題】刈取装置又は脱穀装置の扱胴や選別機構等を適正速度で駆動でき、穀稈刈取り性能や脱穀性能や揺動選別精度等を向上できるようにしたコンバインを提供するものである。
【解決手段】走行部2を有する走行機体1とエンジン20と刈取装置3と扱胴226及び選別機構227,228を有する脱穀装置5を備えたコンバインにおいて、刈取装置3の駆動入力部又は扱胴226の駆動入力部又は選別機構227,228の駆動入力部のすべて又は少なくともいずれか一方を変速自在な構造に構成し、エンジン20の回転速度に対して、刈取装置3の回転速度又は扱胴226の回転速度又は選別機構227,228の回転速度のすべて又は少なくともいずれか一方を変更可能に構成したものである。
(もっと読む)
コンバイン
【課題】穀稈を刈取る刈取部及び刈り取った穀稈を脱穀する扱胴の作動状態に基づいて、刈取モードにあるのか、手扱モードにあるのか又は待機モードにあるのかを判定し、穀粒タンクへ搬送される穀粒量に応じて閾値を設定し、各モード及び設定した閾値に基づいて、送塵口等から排出される穀粒量を制御するコンバインを提供する。
【解決手段】刈取スイッチ82、脱穀スイッチ81、穀桿センサ9及び速度センサ43からの出力をコントローラ90へ入力して、刈取モード、手扱モード又は待機モードを判断する。また穀粒タンクへ穀粒を送出する投口に投口センサ23bを設け、排塵口及び排気通路に排出量センサ34を設け、コントローラ90は刈取モード時に投口センサ23bの出力に基づいて閾値を設定し、排出量センサ34にて検出された穀粒量と閾値とを比較し、比較結果に基づいて排塵口及び排気通路から排出される穀粒量を低減させる制御を行う。
(もっと読む)
コンバイン
【課題】フィードチェンから排藁搬送機構に受け継ぐ際や、排藁搬送機構にて搬送する途次において、排藁の搬送姿勢が乱れたり、排藁が詰ったりするといった問題を解消する。
【解決手段】エンジン14からの動力にて駆動する走行部2を有する走行機体と、刈刃及び穀稈搬送機構を有する刈取装置3と、フィードチェン6を有する脱穀装置5と、脱穀装置5にて脱穀された後の排藁を搬送する排藁搬送機構234とを備える。排藁搬送機構234を駆動させる排藁搬送駆動用電動モータ94と、穀稈搬送機構の搬送速度を検出する搬送速度センサとを更に備える。搬送速度センサの検出情報に基づいて排藁搬送駆動用電動モータ94の回転駆動速度を変更調節するように構成する。
(もっと読む)
コンバイン
【課題】変速または操向操作検出手段と、制御装置と、に関わる何らかの異常が生じた場合は、安全な退避走行を可能とし、脱穀作業等については継続することができるコンバインを提供する。
【解決手段】第一変速操作検出手段141aと第一操向操作検出手段151aの検出情報に基づく入力情報に応じて制御情報を生成して、走行用の油圧式無段変速装置40と操向用の油圧式無段変速装置50とを制御可能とする第一制御装置200と、第二変速操作検出手段141bと第二操向操作検出手段151bの検出情報に基づく入力情報に応じて制御情報を生成する第二制御装置300とを備え、それぞれの入力情報と制御情報とを互いに比較するとともに、それぞれの作動状態を判定し、一方が一致しない場合は、走行速度を制限するように前記走行用ならびに前記操向用の油圧式無段変速装置を制御して、各作業部の駆動を制限するように制御した。
(もっと読む)
コンバイン
【課題】エンジンの回転低下によって、収穫作業能率が著しく低下するのを防止できるものでありながら、扱胴の回転数が低下するのを防止できるようにしたコンバインを提供する。
【解決手段】走行部2を有する走行機体と、走行機体に搭載したエンジン20と、走行部にエンジン20の出力を伝達する走行変速機42,43と、刈取装置3と、扱胴226を有する脱穀装置5を備え、エンジン20の動力を扱胴226に伝達する駆動経路中に扱胴調速手段74を設けたコンバインにおいて、エンジン20の回転数の検出結果に基づき、走行変速機42,43の変速出力を変更することなく、扱胴調速手段74を増減速制御して扱胴226の回転数を維持するように構成する。
(もっと読む)
コンバインの操作装置
【課題】電動モータで駆動される操作機構を利用して、刈取脱穀系のクラッチの入り切り制御に加え、刈取変速機構や穀粒搬出用クラッチの操作をも簡単に、かつ軽快に行えるようにするとともに、極力構造の簡素化も図る。
【解決手段】第1電動モータで駆動される第1操作機構8では、前記刈取クラッチ30及び脱穀クラッチ40が切り状態となる中立位置から一方向側の操作域に、脱穀クラッチ40がクラッチ入りで刈取クラッチ30がクラッチ切りである脱穀操作位置と、脱穀クラッチ40と刈取クラッチ30が共にクラッチ入りとなる刈取脱穀操作位置を設定してあり、第2電動モータで駆動される第2操作機構9では、刈取変速装置15を操作する操作域とは中立位置を挟んで反対側の操作域に、穀粒搬出用クラッチ50を入り操作する穀粒搬出位置を設定してある。
(もっと読む)
コンバイン
【課題】刈取部への同調させる走行速度と、移動速度との切替等の走行操作の不便性、作業性の低下。
【解決手段】無段階に変速可能な走行装置3の前方に刈取部4を設け、走行装置3の上方に脱穀装置2を設ける。刈取部4は、走行装置3の無段変速装置12の油圧ポンプ14のポンプ斜板15の傾斜角度を調節する主変速レバー13の傾倒操作により、走行速度に同調して変速駆動する構成とする。前記無段変速装置12の油圧モータ16のモータ斜板17の傾斜角度は通常走行側と高速走行側とへ切替可能に構成する。モータ斜板17の傾斜角度が低速走行側に切替えられた状態で、前記主変速レバー13が最高速位置に操作されたときの車速を変更調節する速度調整ダイヤル51を設ける。
(もっと読む)
コンバイン
【課題】刈取部の各駆動部を個別に駆動することができるコンバインを提供する。
【解決手段】
刈取部の各駆動部は、それぞれ駆動軸に電動モータをそれぞれ配設しているので、各駆動部を電動モータにより個別に駆動することができ、部品数を少なくして駆動系を簡単化することができる。また、電動モータから直に各駆動部に動力を伝達しているので、動力の伝達効率が向上する。さらに、各駆動部を個別に駆動することができるので、各駆動部に個別にメンテナンスしたい場合などの作業性が向上する。
(もっと読む)
コンバイン
【課題】刈取り駆動構造を簡単に構成できるものでありながら、刈取り駆動機構の製造コストを簡単に低減できるコンバインを提供する。
【解決手段】エンジン14によって作動する走行部2を備えた走行機体と、刈刃装置222と、穀稈搬送装置224と、走行機体の移動速度を検出する車速センサとを備え、エンジンからの一定回転出力を車速同調速度に変更してから、刈刃装置又は穀稈搬送装置に伝達するコンバインにおいて、穀稈搬送装置等にエンジンからの一定回転出力を伝達する遊星ギヤ機構91と、穀稈搬送装置等に対する遊星ギヤ機構の出力を減速する刈取変速用アクチュエータとを備え、車速センサの検出結果に基づき、刈取変速用アクチュエータによって遊星ギヤ機構を減速作動する構成にした。
(もっと読む)
コンバイン
【課題】掻込搬送装置から引継搬送装置へ刈取穀稈を受け渡す際に、この刈取穀稈の脱落を防止し、コンバインの刈取脱穀作業の能率を向上させる。
【解決手段】HST(18)出力を走行装置(2)の車軸(34)と刈取装置(6)の入力軸(70)に伝動する第1伝動分岐部(A)と、刈取装置(6)の入力軸(70)に入力された駆動力を引継搬送装置(68)と刈取前処理部(6a)に伝動する第2伝動分岐部(B)を設け、第2伝動分岐部(B)と刈取前処理部(6a)との間に設けた有段変速装置(C)を低速側にすると、掻込搬送装置(67)と引継搬送装置(68)の各搬送速度とが同等となり、該装置(C)を高速側にすると掻込搬送装置(67)が引継搬送装置(68)よりも高速となる設定とする。
(もっと読む)
収穫機
【課題】作物搬送手段の作動負荷に適応した車速で走行機体を移動でき、作物搬送手段の搬送性能を維持して、作物の搬送姿勢が乱れたり、作物が詰るのを未然に防止できるようにした収穫機を提供するものである。
【解決手段】エンジン14によって作動する走行部を備えた走行機体と、圃場に植立した作物の株元を切断する刈刃装置と、刈刃装置によって株元が切断された前記作物を搬送する作物搬送手段と、走行機体の移動速度を検出する車速センサ285と、走行機体の移動速度を変更する車速変更手段112とを備えてなる収穫機において、作物搬送手段を作動する搬送駆動用電動モータ92と、作物搬送手段の作動負荷を検出する負荷センサ313とを備え、作物搬送手段224の作動負荷が設定負荷以上に増加したときに、負荷センサ313の検出結果に基づき、車速変更手段112を制御して、走行機体の移動速度を減速するように構成したものである。
(もっと読む)
収穫機
【課題】作物搬送手段の作業速度(車速)や圃場の作物の性状等に適応した速度で刈刃装置を作動でき、刈刃装置の切断性能を向上できるようにした収穫機を提供するものである。
【解決手段】エンジン14によって作動する走行部を備えた走行機体と、圃場に植立した作物の株元を切断する刈刃装置と、刈刃装置によって株元が切断された前記作物を搬送する作物搬送手段とを備えてなる収穫機において、刈刃装置を作動する刈刃駆動用電動モータ91と、作物搬送手段への入力回転数を検出する回転センサとを備え、回転センサの検出結果に基づき刈刃駆動用電動モータ91の回転数を制御中、切断性能を維持可能な所定の速度で刈刃装置を作動させるように構成したものである。
(もっと読む)
1 - 20 / 45
[ Back to top ]