
Fターム[2B076ED25]の内容
収穫機本体(機枠、駆動) (12,770) | 制御対象 (1,228) | 自動制御の入切 (35)
Fターム[2B076ED25]に分類される特許
1 - 20 / 35
汎用コンバイン
【課題】リール回転自動制御を制御部に設けた汎用コンバインにおいて、作物が倒伏している場合でも、迅速的且つ効率的な刈取作業を行うことが可能な汎用コンバインを提供する。
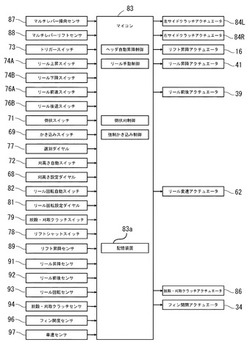
【解決手段】作物を掻込むように回転駆動されるリールの回転速度を変速するリール変速装置と、リールの回転速度を変速操作するリール変速手動操作手段81と、リールを昇降させるリール昇降アクチュエータ41と、リールを昇降操作するリール昇降手動操作手段74A,74Bと、車速を検出する車速検出手段97とを備え、車速に連動してリールの回転速度を制御するリール回転自動制御を制御部83に設けた汎用コンバインであって、倒伏刈制御を制御部83に設け、倒伏刈制御を実行する倒伏刈操作手段71を備え、制御部83は、倒伏刈操作手段71によって倒伏刈制御が行われた場合には、リール昇降アクチュエータ41により自動的にリールを最下げ位置に移動制御する。
(もっと読む)
汎用コンバイン

【課題】リールが上下移動駆動可能に支持された刈取部を、走行機体に昇降駆動可能に連結した汎用コンバインにおいて、リールを一時的に下降させることが容易で、作業効率が良好な汎用コンバインを提供する。
【解決手段】刈取部を昇降させる刈取部昇降手動操作手段と、リールを刈取部に対して昇降させるリール昇降手動操作手段74A,74Bと、制御部83を備え、リールを刈取部に対して最下げ位置まで下降駆動させるリール強制下降制御を制御部83に設けるとともに、リール昇降手動操作手段74A,74Bとは別にリール強制下降操作手段73を設け、制御部83は、リール強制下降操作手段73による操作中はリール強制下降制御を実行する一方で、リール強制下降操作手段73による操作が解除された場合にはリールを元の昇降高さに自動的に復帰させる。
(もっと読む)
汎用コンバイン
【課題】リール回転自動制御を制御部に設けた汎用コンバインにおいて、低速走行時でも、稈こぼれが発生することなく、迅速且つ効率的な刈取作業を行うことが可能な汎用コンバインを提供する。
【解決手段】作物を掻込むように回転駆動されるリールの回転速度を変速するリール変速装置と、変速操作するリール変速手動操作手段81と、車速検出手段97とを備え、車速に連動してリールの回転速度を制御する汎用コンバインであって、車速に関係無くリールを所定速度で回転させる強制掻込制御を制御部83に設け、強制掻込制御を実行する強制掻込操作手段69を備え、制御部83は、強制掻込操作手段69によって強制掻込制御が行われている最中は、リール回転自動制御を解除して強制掻込制御を実行する一方で、強制掻込操作手段69による強制掻込制御が解除された際には、強制掻込制御を解除してリール回転自動制御に復帰する。
(もっと読む)
作業機の作動システム
【課題】第三者による作業機の作動を確実に防止することができる作業機の作動システムを提供する。
【解決手段】管理サーバ3は、ユーザ登録の完了後に携帯用IDコードを携帯端末4に送信するIDコード送信手段51を備え、携帯端末4は、IDコード送信手段51から送信された携帯用IDコードを保存するデータ記憶手段7と、データ記憶手段7に記憶された携帯用IDコードを作業機2に送信するデータ送信手段8とを備え、制御装置5は、携帯端末4から送信された携帯用IDコードと予め保存された作動用IDコードとの照合を行うIDコード照合手段と、照合手段によってIDコードの照合が成立したときに制御装置5による通常制御を許可すると共に照合が不成立のときに通常制御を許可しない制御制限手段とを備えている。
(もっと読む)
普通型コンバイン
【課題】掻込リールの自動変速により、各種の作業走行について安定で無駄の無いリール変速動作を確保しつつ、手動変速時を含めて無駄な対応変速動作を回避してリール変速部の耐久性を確保することができる普通型コンバインを提供する。
【解決手段】普通型コンバインは、原動部(1)から刈取部(4)に刈取動力を受ける刈取入力軸(4a)と、この刈取入力軸(4a)から掻込リール(7)を無段階に変速伝動するリール変速部(6)と、このリール変速部(6)の出力回転速度を指示目標に沿って変速制御する制御部(C)とを備えて構成され、上記制御部(C)は、刈取走行に使用する車速範囲を複数に区分して定めた車速区分別の目標回転速度を指示目標として変速制御するとともに、上記刈取入力軸(4a)に受ける刈取動力の停止に応じてリール変速部(6)の変速制御を停止するものである。
(もっと読む)
コンバインの自動エンジン回転制御装置
【課題】自動エンジン回転制御機能を備えたコンバインにおいて、この機能を停止した際にエンジン回転数の急激な変化を回避しながら低速回転数に移行させる。
【解決手段】刈取・脱穀クラッチセンサがクラッチ入り検出状態で且つ前記自動エンジン回転制御スイッチが入り状態から切り状態に切り換え操作されると、アクセルレバーを手動変更操作するまでの間はエンジン回転数を元のまま維持するように制御する機能を前記コントローラ及びエンジンコントローラにもたせる。
(もっと読む)
コンバイン
【課題】刈取部の昇降操作や車体の操向操作を行うレバー操作具の把持部にスイッチ操作具を設け、オペレータの意図しない刈取部の昇降作動又は車体の操向作動を防止するコンバインを提供することを課題としている。
【解決手段】レバー操作具54の把持部側に設けたスイッチ操作具64と、レバー操作具54のレバー操作を検出するレバー操作検出手段72,73,74,76と、該レバー操作検出手段72,73,74,76の検出結果に基づいて刈取部4の昇降及び車体の操向制御を行う制御部60とを備えたコンバインにおいて、スイッチ操作具64の押し操作が検出されている際は、レバー操作検出手段72,73,74,76の検出結果に基づく刈取部4の昇降又は車体の操向を規制する規制制御を行うように前記制御部60を構成する。
(もっと読む)
移動農機
【課題】エンジンから排出される排気ガス中から微小固形物を除去する除去フィルタと、除去フィルタに付着した付着物を加熱によって取除くことにより除去フィルタの機能を再生させる再生手段とを設けるにあたり、除去フィルタの機能再生作業を安定的に行うことが可能な移動農機を提供することを課題とする。
【解決手段】エンジンの排気ガス中の微小固形物の除去を行う除去フィルタと、除去フィルタに付着した付着物を加熱によって取除くことにより除去フィルタの機能を再生させる再生手段と、再生手段を介した除去フィルタの再生制御を行うとともに各作業機の駆動制御を行う制御部とを備え、作業機を駆動させる操作を検出する駆動操作検出手段を設け、制御部は再生手段を介した除去フィルタの再生制御を行っている最中に、駆動操作検出手段によって作業機を駆動させる操作が検出された場合には、操作をキャンセルして作業機を駆動させない。
(もっと読む)
コンバイン
【課題】本発明は、低速刈取走行時において前処理部を確実に駆動できると共に、穀稈の搬送乱れを防止できるコンバインを提供することを課題とする。
【解決手段】刈取部(5)を変速駆動する刈取駆動手段(51)と、刈取駆動手段(51)を制御する制御装置(64)とを設け、制御装置(64)に、車速に連動させて刈取駆動手段(51)を制御する車速連動駆動手段(B,C)を設けたコンバインにおいて、制御装置(64)に、機体の走行速度に関係なく刈取部(5)を低速(V1)で駆動するように制御する定速駆動手段(A)を設けると共に、車速連動駆動手段(B,C)から定速駆動手段(A)への駆動切換を行う切換操作具(30)を運転操作部(8)に設け、定速駆動手段(A)は、切換操作具(30)のON操作に基づき刈取部(5)を低速(V1)駆動に切り換えると共に、ON状態が維持されると、刈取部(5)を次第に増速するように構成した。
(もっと読む)
走行車両
【課題】走行機体に搭載されたエンジンの動力を変速する油圧式無段変速機構の制御手段に異常が生じた場合に、圃場からだけでもコンバインを脱出させるようなリンプホーム運転(縮退運転)を実行出来るようにする。
【解決手段】走行車両は、左右の走行部に伝達する油圧式無段変速機構と、走行機体1の直進速度を変更操作する直進操作具と、走行機体の進行方向を変更操作する旋回操作具と、油圧式無段変速機構の変速出力を調節する電気的アクチュエータ272,270と、各操作具の操作量に応じて電気的アクチュエータ272,270を駆動させる制御手段とを備える。油圧式無段変速機構には、その変速出力を電気的アクチュエータ272,270とは別個に手動操作するための緊急手動操作具355,356を設ける。
(もっと読む)
コンバイン
【課題】広い圃場内に点在する手刈り穀稈やこぼれ稈等を効率よく手扱ぎすることができるコンバインを提供する。
【解決手段】脱穀クラッチが入り状態で、且つ走行機体が前進走行中にある時、アクチュエータを介して刈取クラッチを入り状態とする刈取クラッチ自動制御と、前処理部を所定の高さ以上に上昇させた時、刈取クラッチを自動的に切り状態とするオートクラッチ制御を設けると共に、該オートクラッチ制御を実行可能状態または実行不能状態に切替えるオートクラッチスイッチを長押し操作することにより、前記刈取クラッチ自動制御を解除できるように構成した。
(もっと読む)
刈取収穫機
【課題】走行機体に刈取部が上昇非作業高さと下降作業高さとに昇降操作自在に連結され、走行機体の走行装置を変速駆動する走行変速装置を備えた刈取収穫機において、刈取部の接地トラブルを回避しながら高速移動されるようにする。
【解決手段】刈取部の走行機体に対する連結高さを検出する連結高さセンサ61、走行変速装置7が設定低速位置から増速操作されることを牽制する牽制作用状態と、走行変速装置が設定低速位置から増速操作されることを許容する牽制解除状態とに切り換え自在な変速牽制手段77を備えてある。刈取部が設定連結高さより高い連結高さに位置する状態において変速牽制手段77が牽制解除状態に切り換わり、刈取部が設定連結高さ以下に位置する状態において変速牽制手段77が牽制作用状態に切り換わる。
(もっと読む)
作業車の走行制御装置
【課題】 煩わしさの少ない簡単な作業で作業対象領域における自動操向制御用の設定経路を設定することが可能となる作業車の走行制御装置を提供する。
【解決手段】 GPS位置情報算出手段100にて求められる車体の位置情報に基づいて車体が作業対象領域内の設定経路に沿って走行するように操向手段を自動的に操作する自動操向制御を実行する制御状態と自動操向制御を実行しない非制御状態とに切り換え自在な自動操向制御手段JSが、非制御状態において経路設定モードに切り換えられると、車体が操向操作具にて操向手段が操作され且つ作業対象領域の周縁部に沿って移動するときのGPS位置情報算出手段100にて求められる複数の車体の位置情報を記憶し且つ記憶された複数の車体の位置情報に基づいて作業対象領域を特定してその特定した作業対象領域に基づいて設定経路を自動設定する経路設定処理を実行する。
(もっと読む)
作業車
【課題】直進状態と旋回状態とに切り換え自在な操向手段を備えて、直線状の作業経路に沿って走行する直進走行と前記直線状の作業経路の終端部から次回の直線状の作業経路に向けて予め定めた設定走行パターンにて走行する経路変更用走行とを繰り返す形態で作業を行う作業車に関する。
【解決手段】作業経路変更用走行を自動で行うように前記操向手段101を切り換え制御する作業行程切換制御を実行する自動旋回制御手段102と、前記作業経路変更用走行の開始を指令する手動操作式の自動旋回指令手段SWとが備えられ、前記自動旋回制御手段102が、前記自動旋回指令手段SWの指令に基づいて前記作業行程切換制御を実行するように構成する。
(もっと読む)
コンバインの姿勢制御装置
【課題】機体の左右姿勢を制御する姿勢制御装置を備えたコンバインにおいて、姿勢制御装置の目標傾斜角を設定する設定器であるダイヤルを他部品の兼用化により廃止してコストの低減を図る。
【解決手段】機体の左右姿勢が設定傾斜となるようにクローラ走行装置16L,16Rを昇降制御する自動傾斜制御と、該自動傾斜制御に優先して手動操作具65によりクローラ走行装置16L,16Rを昇降制御する手動傾斜制御とを可能にする制御手段41,61とを備え、前記自動傾斜制御での作業走行中に手動操作具65の操作を行った時は、その操作を終了した時点における機体の左右姿勢を設定傾斜とする傾斜設定モードとして自動傾斜制御に復帰せしめると共に、前記傾斜設定モードでの作業走行中に自動傾斜制御の起動手段62を操作すると、傾斜設定モードから機体の水平姿勢を設定傾斜とする水平設定モードへ自動的に切換えて自動傾斜制御を継続するように構成した。
(もっと読む)
コンバイン
【課題】従来のコンバインは、自動的に刈取部が地面に追従して接地可能となっていると、刈取作業を行っていない場合においてまでも、刈取部が意図せず下降する、という問題があった。
【解決手段】刈取部6が地面に接地しているか否かを検知する接地検知センサ57と、刈取部6を昇降操作する上昇・下降操作スイッチ51・52と、を備え、制御部60は、刈取作業時に、接地検知センサ57によって刈取部6が地面に接地していないことを検知すると、刈取部6が下降する自動制御モードと、刈取作業時に、上昇・下降操作スイッチ51・52の昇降操作によって刈取部6が昇降する手動制御モードと、を切替可能に備え、自動制御モードである場合に、コンバインのエンジン10から刈取部6への動力を断接する刈取クラッチ37が切状態になると、手動制御モードに切り替わる。
(もっと読む)
コンバイン
【課題】掻込搬送装置から引継搬送装置へ刈取穀稈を受け渡す際に、この刈取穀稈の脱落を防止し、コンバインの刈取脱穀作業の能率を向上させる。
【解決手段】HST(18)出力を走行装置(2)の車軸(34)と刈取装置(6)の入力軸(70)に伝動する第1伝動分岐部(A)と、刈取装置(6)の入力軸(70)に入力された駆動力を引継搬送装置(68)と刈取前処理部(6a)に伝動する第2伝動分岐部(B)を設け、第2伝動分岐部(B)と刈取前処理部(6a)との間に設けた有段変速装置(C)を低速側にすると、掻込搬送装置(67)と引継搬送装置(68)の各搬送速度とが同等となり、該装置(C)を高速側にすると掻込搬送装置(67)が引継搬送装置(68)よりも高速となる設定とする。
(もっと読む)
移動農機
【課題】デモンストレーション動作を自動で行うことによって、集客及び点検の容易な移動農機を提供する。
【解決手段】コンバインのマイコン50は、データ読出し手段51及び動作データを格納したデータ格納手段52を有し、こぎ深さ自動スイッチ46を押しながらエンジンを始動させることによって、通常モードから設定モードへと切換わる。データ格納手段52は機体各部ごとに個別に形成されており、説明者は作動箇所を適宜選択して、データ読出し手段51にデータ格納手段52から動作データを読出させる。マイコン50に読出された動作データが各種スイッチ及びセンサから入力されたとみせかけて、こぎ深さ駆動モータ56、搬送駆動モータ58、前処理昇降ソレノイド12a、オーガ旋回モータ36などのアクチュエータを制御し、機体を動作データ通りに作動させる。
(もっと読む)
コンバインの操作制御装置
【課題】 刈取収穫作業を開始するときの操作の簡略化を図り、しかも、扱深さ制御手段を的確に自動制御状態に切り換えることができる作業車の操作制御装置を提供する。
【解決手段】 操作制御手段Cが、作業指令手段25にて作業開始指令が指令されると、アクセル手段63を前記定格回転状態に操作し、作業クラッチ14を前記入り状態に操作し、且つ、扱深さ制御手段Jを自動制御状態に切り換えるように構成されているコンバインの操作制御装置。
(もっと読む)
コンバイン
【課題】手扱作業部近傍で機体を左下がり傾斜させることで、手扱作業の能率を向上する。
【解決手段】機体に対して左右のクローラ走行装置(5,5)を独立して昇降するクローラ昇降装置(31,32)と、機体の左右傾斜角度を検出する傾斜角度検出手段(44)の検出または運転操作部(4)に設けた手動傾斜操作手段(48)の検出に基づき、クローラ昇降装置(31,32)を昇降制御して機体の左右傾斜または車高を制御する傾斜制御手段(41)を備え、脱穀部(3)に手扱作業部(11)を備えたコンバインにおいて、前記手扱作業部(11)の近傍に左傾斜操作手段(15)を設け、左傾斜操作手段(15)を操作すると機体が左下がり傾斜姿勢となるように、左傾斜操作手段(15)と前記傾斜制御手段(41)とを連係させると共に、機体が左下がり傾斜姿勢となる時に前処理部(2)の下部が地面に突っ込むのを防止する突っ込み防止手段を設けた。
(もっと読む)
1 - 20 / 35
[ Back to top ]