
Fターム[2B083BA15]の内容
収穫機の構成要素−刈取部 (10,121) | 刈取機全体の構成 (1,787) | 車両に装着されるもの (1,119) | 装着位置 (603) | 前部 (145)
Fターム[2B083BA15]に分類される特許
1 - 20 / 145
歩行型草刈り機
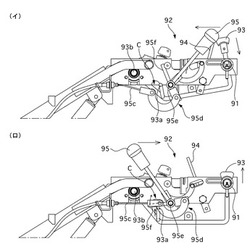
【課題】 刈り取り操作停止時におけるレバー操作が容易な歩行型草刈機の提供。
【解決手段】 ハンドル9部付近に刈刃クラッチレバー95とデッドマンクラッチレバー93を備えた歩行型草刈り機において、デッドマンクラッチレバー93のON状態からOFF状態への切り換えに連動して刈刃クラッチレバー95のON状態からOFF状態に切り換える連動機構を備える。
(もっと読む)
歩行型草刈り機

【課題】 果樹園の低い枝の下や、壁際など、車体が入れない箇所でも草刈りを可能とする歩行型草刈機の提供。
【解決手段】 クローラ11による走行駆動部1の前側に、昇降機構5により昇降可能な刈取部3を備えた歩行型草刈り機において、走行駆動部1の前側には先端側に左右一対のキャスター21、21を備えた支持フレーム2が走行駆動部1に対し横スライド可能な横スライド機構4を介して連結され、刈取部3は支持フレーム2に対し昇降機構5を介して昇降自在に吊下されている構成とした。
(もっと読む)
歩行型草刈り機
【課題】 刈取部を昇降する昇降機構の操作をハンドルを握った状態のままで操作することができる遠隔操作機構を備えた歩行型草刈機の提供。
【解決手段】 駆動輪を備えた走行駆動部の前側に、昇降機構により昇降可能な刈取部を備え、走行駆動部の後側にハンドル部を備えた歩行型草刈り機において、
前記昇降機構を操作する遠隔操作機構がハンドル部に位置する操作者の近くに備えられている構成とした。
(もっと読む)
回転式草刈り刃取付け装置
【課題】摩耗による草刈り刃の反転作業において、反転作業時間を大幅に削減できる草刈り刃取付け装置を提供する。
【解決手段】円筒形のパイプの両端を軸支され、その円筒形パイプの円周上に、貫通孔a(24)を有する円筒形のハウジング(21)が溶着されたローター(19)において、ハウジング(21)内部にスプリング(25)を装入し更にボス(23)を嵌め込む。ボス(23)のハウジング(21)内に位置する部位には、貫通孔b(26)を有し、ピン(22)にてハウジング(21)内で直動可能且つ回動可能に係止されている。またボス(23)のハウジング(21)への装着側と反対に位置する部位には、端部に貫通孔c(32)を有する二枚のプレートが一定の間隔を保持した状態で突設されたホルダーB(31)を有し、草刈り刃(15)を揺動可能に取り付けることができる。
(もっと読む)
作業ユニットの昇降装置
【課題】作業ユニットを車輪の軸線を中心として作業ユニットを昇降させるとともに、作業ユニットの車輪を浮かすことができる作業ユニットの昇降装置を提供する。
【解決手段】昇降装置65は、車幅方向に延びる軸線Ax1を中心として回転できるように配置されたドラム式車輪18を有する芝刈りユニット2と、軸線Ax1の回りを回転可能な状態かつ軸線Axの方向に移動不能な状態で芝刈りユニット2に連結され、芝刈りユニット2とともに走行可能な本体3とを備えた芝刈り作業車1に適用される。昇降装置65は、芝刈りユニット2に設けられた第1支持部66と、本体3に設けられた第2支持部67と、第1支持部66にリンク結合された先端部70aを持つ伸縮ロッド70及び第2支持部67にリンク結合された後端部69aを持つ本体部69を有するリニアアクチュエータ68とを備えている。
(もっと読む)
刈かすの収集排出装置
【課題】収集した刈かすの排出作業を省力化できる刈かすの収集排出装置を提供する。
【解決手段】刈かすの収集排出装置30は、芝刈りユニット2に取り付けられ、刈かすが流入する流入口31を持つ本体部86と本体部86の上端部に回転可能な状態で連結された可動部87とに分割され、本体部86と可動部87とが突合わされた閉位置と可動部87が上向きに回転して本体部86から離れた開位置との間で動作可能なバケット85と、バケット85の内部に設けられ、閉位置の際に流入口31の近くで横になった姿勢で位置する排出プレート92を有し、排出プレート92が閉位置から開位置へ変化するバケット85の動作に連動して本体部87と可動部87との間の開口96に向かって立ち上がるように排出プレート92を動作させる排出機構91とを備える。
(もっと読む)
作業車
【課題】旋回操作の自由度が高く実用性が高い作業車を提供する。
【解決手段】芝刈り作業車1は、車幅方向に延びる軸線Ax1を回転中心として回転駆動されるドラム式車輪18L、18Rを有する芝刈りユニット2と、芝刈りユニット2に連結されたフレーム10と、フレーム10に設けられた操舵駆動装置11と、を備え、操舵駆動装置11は、車幅方向に配置された一対の操舵輪40L、40Rと、一対の操舵輪40L、40Rの各操舵輪を独立して転舵可能な操舵部41L、41Rと、一対の操舵輪40L、40Rを回転駆動できる車輪駆動部42L、42Rと、を備える。
(もっと読む)
自動芝刈り機及びその制御方法
【課題】市販の芝刈り機を改造して自律走行のための学習と自動運転をさせるための制御装置及び制御プログラムを付与した自動芝刈り機及びその制御方法を提供する。
【解決手段】本発明の自動芝刈り機は、手動運転型の芝刈り機に自律走行のための各種装置が取り付けられて自動運転を行う自動芝刈り機であって、少なくとも位置検出手段を含む各種センサと、少なくとも走行車両の駆動系(アクセル)及び操舵系(ステアリング)を含む自動操縦のためのアクチュエータと、アクチュエータにより走行車両を目的位置に移動させるための走行制御ユニットと、走行路面に沿って芝刈りを行うカッティング部と、センサの情報を基に走行制御ユニットを制御するための各種演算処理を行う演算ユニットと、無線通信により演算ユニット及び走行制御ユニットを介して走行車両を遠隔操作するための無線通信手段と、を備える。
(もっと読む)
電磁ブレーキ付作業車両
【課題】電磁ブレーキ付作業車両において、左右の電磁ブレーキのうち、一方の電磁ブレーキの異常発生時でも、運転者の意図しない旋回を有効に防止することである。
【解決手段】電磁ブレーキ付作業車両である芝刈車両10は、左右の電磁ブレーキ32,36と、共通ブレーキ解除手段であるブレーキリレーと、ECUとを含む。ECUは、左右の電磁ブレーキの通電状態を比較し、比較部で比較した通電状態の差が許容上限を超える場合に、バッテリと左右の電磁ブレーキ32,36との電気的接続を遮断して左右車輪18,20を制動させるようにブレーキリレーを制御する。
(もっと読む)
芝刈り状況監視機能を有する自動芝刈り機
【課題】走行中の芝刈り状況を監視することが可能な芝刈り状況監視機能を有する自動芝刈り機を提供する。
【解決手段】少なくとも位置検出手段を含む各種センサを有する自律走行型の自動芝刈り機であって、走行車両の駆動系(アクセル)、制動系(ブレーキ)、及び操舵系(ステアリング)のうちの少なくとも一つを自動操作するためのアクチュエータと、アクチュエータにより走行車両を目標地点に移動させるための走行制御ユニットと、走行路面に沿って芝刈りを行うカッティング部と、芝刈り状況を判断するための画像処理ユニットと、センサの情報を基に各ユニットを制御するための各種演算及び演算に対応する処理を行う演算ユニットと、無線通信により演算ユニット及び走行制御ユニットを介して走行車両を遠隔操作するための無線通信手段と、を備える。
(もっと読む)
刈刃の着脱構造
【課題】回転ドラムに対して一連の固定座と取付軸を設定して、フレール爪の複数の装着部位をまとめて着脱可能とした刈刃の着脱構造を提供する。
【解決手段】水平方向に延設されて動力によって駆動される回転ドラム6と、回転ドラム6外周に間隔を置いて取り付けられる多数のフレール爪11とを備えた草刈機に適用する刈刃の着脱構造であって、回転ドラム6にフレール爪11の取付軸13を配置し、取付軸13を着脱させて、複数の装着部位に取付けられたフレール爪11を同時に着脱可能とした。
(もっと読む)
乗用型芝刈り車両及びその制御方法
【課題】走行時におけるステアリングのふらつきを抑制することで、予期せぬ旋回を防止して旋回性や直進性を向上させることができる乗用型芝刈り車両及びその制御方法を提供する。
【解決手段】乗用型芝刈り車両1は、ステアリングホイール16の操作角度に応じて回転軸の角度が変更される後輪12と、ステアリングホイール16の操作角度を検出するエンコーダE11と、エンコーダE11の検出結果が過去の一定期間(遊び期間)に亘って予め設定された範囲(遊び範囲)内に収まっている場合には、ステアリングホイール16の操作角度をエンコーダE11の検出結果で示される操作角度に固定して後輪12を制御する制御装置34とを備える。
(もっと読む)
手動運行草処理機
【課題】吸気側フィルタの目詰まりやキャブレータへの異物の浸入を軽減して、保守点検の手間や、故障の発生が少ない手動運行草処理機を提供する。
【解決手段】エンジンユニット3の吸気側カバー30から、フレキシブル吸込管2を延伸状に付設して、回転草刈部5又は回転草引抜き爪部からフレキシブル吸込管2の自由端側吸込口21を遠ざけるように構成した。
(もっと読む)
集塵装置
【課題】草や小さなゴミ等を効率よく簡単に回収できる集塵装置を提供する。
【解決手段】車輪2と、ブロワ4と、ブロワ4を駆動する駆動装置3と、ブロワ4の送風によって収集対象物Zを吸引する誘引ダクト6と、を搭載するハンドル1付きの手押し式集塵機10を備え、かつ、箱型の回収容器12と、回収容器12を積載する台車14とを備え、集塵機10のブロワ4と回収容器12とを可撓管8によって連結し、ブロワ4の排出口4Aから可撓管8内に圧送されて可撓管8の先端口部8Aから吐出される収集対象物Zを回収容器12にて収集するように構成している。
(もっと読む)
芝刈機
【課題】電動モータの回転数が小さく且つ集草効率の高い芝刈機を提供する。また、小型で操作性に優れた芝刈機を提供する。
【解決手段】芝刈機の動力源であるモータ50は、出力軸52と一体に回転する回転子53と、ハウジング30に固定された固定子54とを有し、出力軸52が略鉛直となるように配置される。回転子53は、出力軸52の軸方向視において出力軸52を中心に円周方向に配列した略環上の複数のコイルが設けられた円板状のコイルディスクを有し、固定子54は、コイルディスクを出力軸52の軸方向に通過する磁束を発生するマグネット71と上ヨーク72および下ヨーク73とを有する。モータ50の出力軸52には、芝草を刈るための回転刃33が取付けられる。また、モータ50と刈り取った芝草を送るファン37とには、動力伝達機構46が取付けられ、モータ50からの動力が増速してファン37に伝達される。
(もっと読む)
バックホー用草刈アタッチメント
【課題】
バックホーに装着されて、ハンマーナイフの利用により、堤防法面等に生えている草木類を高能率で刈取可能にすると共に、刈取直後の刈草を圧縮状態で収容可能な草刈アタッチメントの提供である。
【解決手段】
バックホーに装着される草刈アタッチメントAであって、上面にブーム取付用ブラケット28を備えたケーシングK内にハンマーナイフカッターCが回転可能に収容された草刈ユニットUと、前記ハンマーナイフカッターCにより叩き切られて後方に放てきされた刈草G’の収容と、当該刈草G’の排出との双方を可能とすべく、前記ケーシングKの後端部に開閉可能にヒンジ連結された刈草収容バケットBと、前記ハンマーナイフカッターCと前記刈草収容バケットBの刈草収容空間Vとを部分的に分離させるセパレータJとを備えた構成とする。
(もっと読む)
草刈り機
【課題】
草等の刈り取り、積み込みの各作業が可能な油圧ショベルの先部に取り付けて作業するアタッチメントに関して、刈り取り、積み込みの各作業をより簡単な作業動作で行うことができる装置を提供する。
【解決手段】
油圧ショベルのアームに支持されたベース部、このベース部に対して左右方向に揺動可能な揺動部、この揺動部に対して限定した角度範囲で回転可能なリスト揺動部、このリスト揺動部には作業具を備え、前記作業具は、草等を刈り取るバリカンを備え、前記バリカンの上部には前記バリカン長手方向と同じ方向の動作で草等を把持できる把持部を備えた草刈り機を使用する。この草刈り機で、バリカン作動し草を刈りながら旋回動作を行うと、バリカン上部に設けられた把持部に草が集草され、把持して積み込みをする。
(もっと読む)
乗用型芝刈り車両及びその制御方法
【課題】車輪のスリップを抑制して芝の損傷を防止することができる乗用型芝刈り車両及びその制御方法を提供する。
【解決手段】乗用型芝刈り車両1は、前輪11a,11bを回転させる駆動力を発生するモータ41を備える車両であって、モータの回転数を検出するモータ回転数センサQ1と、モータ41に流れる電流の電流値を検出するモータ電流センサQ2と、モータ回転数センサQ1及びモータ電流センサQ2の少なくとも一方の検出結果に基づいて前輪11a,11bがスリップ状態であるか否かを判定するスリップ状態判定部38aと、前輪11a,11bがスリップ状態であるとスリップ状態判定部38aで判定された場合にモータ41のトルクを減ずる制御を行うモータ制御部38cとを備える。
(もっと読む)
乗用型芝刈り車両及びその制御方法
【課題】ペダルやステアリングの操作状況に応じて生ずる芝の損傷を防止するとともに車両にかかる負担を軽減することができる乗用型芝刈り車両及びその制御方法を提供する。
【解決手段】乗用型芝刈り車両1は、ステアリングホイール16の操作量に応じて回転軸の角度が変更される後輪12を備える車両であって、車両の速度を検出する速度センサ36と、ステアリングホイール16の操作量に基づいて目標とすべき後輪12の回転軸の角度である目標操舵輪角度を算出する目標操舵輪角度算出部38aと、速度センサ36の検出結果に応じて後輪12の回転軸の角度の制限値である操舵輪角度制限値を設定する操舵輪角度制限値設定部38bと、目標操舵輪角度が操舵輪角度制限値を超えている場合には、目標操舵輪角度を操舵輪角度制限値に設定して後輪12を制御するモータ制御部38cとを備える。
(もっと読む)
乗用型芝刈り車両及びその制御方法
【課題】モータで発生する回生電力をバッテリに適切に充電する制御を行うことにより、回生用抵抗器の小型化及びエネルギーの有効利用を図ることができる乗用型芝刈り車両及びその制御方法を提供する。
【解決手段】乗用型芝刈り車両1は、電力を供給するバッテリBと、バッテリBからの電力によって走行用の駆動力を発生するモータ41と、車両の速度を検出する速度センサ36と、車両の姿勢を検出する3Dジャイロセンサ37と、速度センサ36及び3Dジャイロセンサ37の検出結果に基づいてモータ41で発生する回生電力の電力量を推定する回生電力量推定部38bと、回生電力量推定部38bの推定結果に応じてバッテリBの充電量を制御する充電制御部38bとを備える。
(もっと読む)
1 - 20 / 145
[ Back to top ]