
Fターム[2B084AC03]の内容
収穫機の構成要素−穀稈搬送 (1,447) | 自脱型穀稈搬送平面視径路のタイプ (130) | 合流横送り後後方送りタイプ (8)
Fターム[2B084AC03]に分類される特許
1 - 8 / 8
脱穀装置
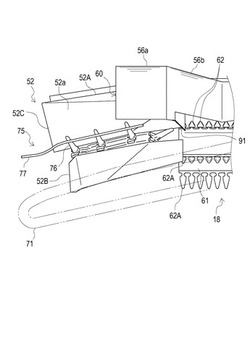
【課題】脱穀性能を向上させることができる脱穀装置を提供する。
【解決手段】脱穀前の穀稈を扱室57内に導入するための穀稈導入口60を扱室カバー56との間に形成するように配置されて、脱穀前の穀稈の穂先部を扱室57外から穀稈導入口60を介して扱室内まで案内可能な案内部材52を備える。穀稈の穂先部が案内部材52によって案内されて穀稈導入口60を介して扱室57内に導入されるように、穀稈の株元部を挟持しながら扱胴18の回転軸方向に沿って搬送可能な株元搬送装置71を備える。株元搬送装置71によって株元部を搬送されている穀稈の穂先部を当該穂先部が案内部材52で案内されながら穀稈導入口60に向かうように搬送可能な穂先搬送装置75を備える。扱胴18に、その外周面から当該扱胴18の径方向外側に向かって突出する複数の扱歯62を備える。複数の扱歯62のそれぞれを、前記回転軸方向に平行な平面に沿って扁平に形成する。
(もっと読む)
コンバイン

【課題】刈取搬送装置側の扱深さ調節装置の終端部からフィードチェンの搬送始端部分への引継ぎ時に、穀稈株元の垂れ下がりを防止して整然と搬送できるものとし、脱穀作業を円滑化する。
【解決手段】フィードチェン(7)のチェンレール(9)に支持する穀稈株元ガイド(10)の始端部をフィードチェン(7)の搬送始端部よりも低い位置に配置し、該穀稈株元ガイド(10)の中間部分から後部に至るガイド部分(10a)をフィードチェン(7)よりも外方へ張出させながら該フィードチェン(7)の搬送方向に沿わせて後上方に向けて延設し、該穀稈株元ガイド(10)によってフィードチェン(7)で搬送する穀稈の挟持部位よりも外側へ隔たった株元部を下側から受け止めて支えながら搬送案内する構成とする。
(もっと読む)
コンバイン
【課題】収穫作業の開始時には刈取クラッチの入り操作を確実に行い、必要に応じて脱穀クラッチのみの入り操作も可能なコンバインを構成する。
【解決手段】作業クラッチレバー45が、切り位置OFFと、脱穀作業位置Mと、収穫作業位置ONとに操作自在に構成され、この操作を検出する脱穀位置センサ64と収穫位置センサ65とを備えている。これらのセンサの検出結果から脱穀クラッチCeと刈取クラッチCdとを制御するクラッチ制御手段87を備えている。クラッチ制御手段87は、作業クラッチレバー45を切り位置OFFから収穫作業位置ONに操作する際に、脱穀作業位置Mを通過する際に脱穀クラッチCeを入り状態に設定せず、収穫作業位置ONにおいて脱穀クラッチCeと刈取クラッチCdとを入り状態に設定する。
(もっと読む)
コンバイン
【課題】
疎植栽培穀稈収穫用のコンバインにおいて、層厚の厚薄に変化する搬送穀稈を搬送装置の挟持力を調整しながら円滑に搬送する。
【解決手段】
コンバインにおいて、刈取搬送部(7)には刈取穀稈を脱穀部(6)のフィードチエンへ搬送する中継ぎ搬送装置(16)、調節搬送装置(15)、引継ぎ搬送装置(17)を設け、これら中継ぎ搬送装置(16)、調節搬送装置(15)及び引継ぎ搬送装置(17)のは搬送チエーンに対向する挟持ガイド杆を押圧支持手段(22)により所定押圧力で押圧し、搬送穀稈の層厚が厚くなり挟持力が強くなり過ぎると、押圧支持手段(22)が挟持力を弱め挟持ガイド杆が拡がる構成とする。
(もっと読む)
コンバイン
【課題】疎植栽培に有り勝ちな穀稈層の厚い搬送穀稈を、脱穀作業に適する穀稈層まで薄く均しながらフィードチェンに受継がせ、脱穀装置の脱穀選別能力に合わせてロスを最小に止めて穀粒の回収効率を高める。
【解決手段】走行フレーム(1)に搭載した脱穀装置(2)の前方に刈取搬送装置(3)を設け、脱穀装置(2)に装備したフィードチェン(5)の搬送始端部分(5a)に沿わせて穀稈搬送用の上側供給チェン(6)と下側供給チェン(7)を配置し、該上下一対の上側供給チェン(6)と下側供給チェン(7)を、互いの穀稈搬送速度に差を有して穀稈の搬送層厚を薄く均しながら搬送して該穀稈の株元部分を順次フィードチェン(5)に受継がせる構成とする。
(もっと読む)
コンバイン
【課題】搬送駆動用電動モータによって穀稈搬送手段を適正速度で作動でき、穀稈搬送手段の搬送性能を向上できるようにしたコンバインを提供するものである。
【解決手段】エンジン14によって作動する走行部を備えた走行機体と、穀稈の株元を切断する刈刃装置と、切断された前記穀稈を搬送する穀稈搬送手段と、テンションクラッチを有するベルト伝動機構とを備え、刈刃装置にエンジンの回転力を伝達するように構成してなるコンバインにおいて、穀稈搬送手段を作動する搬送駆動用電動モータ92と、テンションクラッチの入り切り操作を検出する刈取クラッチセンサ293と、穀稈搬送手段の穀稈搬送上流側又は下流側の少なくともいずれか一方の穀稈搬送速度を検出する搬送速度センサ291,292とを備え、刈取クラッチセンサ293の検出結果と搬送速度センサ291,292の検出結果とに基づき、搬送駆動用電動モータ92を作動制御可能に構成した。
(もっと読む)
コンバインの穀稈移送装置
【課題】刈取機で刈取りした一方側条列を移送される穀稈と、他方側条列を移送される穀稈とを、合流部でスムーズに合流させて、後方上部へ移送させようとするものである。
【解決手段】走行車台2の前方部には、穀稈を刈取り後方上部へ移送する刈取機4は、穀稈を引起しする複数の引起装置6と、穀稈の一方側の条列、及び他方側の条列から掻込みする複数の掻込装置9aと、該掻込装置9aの後方右側には、穀稈の穂先側を後方上部へ移送する三角形状の穂先移送装置12と、掻込装置9aの後方左側には、穀稈を後方上部へ移送する供給移送装置14等とを設けたコンバインの穀稈移送装置において、前記穂先移送装置12上部の移送終端部の穂先上部軸13aの軸心イと、供給移送装置14の従動軸15aの軸心ロとは、前後方向に略直線上へ位置させて設けたことを特徴とするコンバインの穀稈移送装置の構成である。
(もっと読む)
コンバイン
【課題】 分草装置8や引起装置9を畦に干渉させることなく、刈刃10を畦に接近させてこの畦際の植立穀稈を円滑に刈り取ることができるものとする。
【解決手段】 刈取部4の上部に配置する回動軸心Sを支点として分草装置8と引起装置9とを一体的に上下回動自在に構成する。そして、分草装置8と引起装置9との上方回動に関連して、扱ぎ深さ自動制御手段Tによる扱ぎ深さの自動制御状態を解除ないし中断させる。または、扱ぎ深さ自動制御手段Tにおける目標の扱ぎ深さを所定量だけ深扱ぎ側に補正する。また、分草装置8と引起装置9との下方回動に関連して、扱ぎ深さ自動制御手段Tによる扱ぎ深さの自動制御状態を開始ないし再開させる。または、扱ぎ深さ自動制御手段Tにおける目標の扱ぎ深さを所定量だけ浅扱ぎ側に補正する。
(もっと読む)
1 - 8 / 8
[ Back to top ]