
Fターム[2B084BH11]の内容
収穫機の構成要素−穀稈搬送 (1,447) | 駆動、安全 (174) | 報知、表示 (6)
Fターム[2B084BH11]に分類される特許
1 - 6 / 6
コンバインの穀稈係止搬送装置
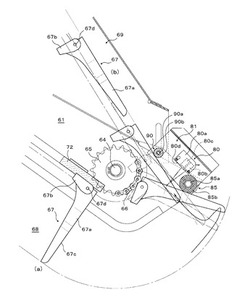
【課題】刈取・脱穀作業中にタインの形状の異常をセンサで検出すること。
【解決手段】無端帯状体の外周に間隔を開けて複数のタインを起立・倒伏自在に取り付けて、無端帯状体をその伸延方向に回動させることで、タインが起立姿勢で穀稈に係止作用する作用側経路と、タインが倒伏姿勢で穀稈に作用しない非作用側経路を形成した穀稈係止搬送装置であって、穀稈に係止作用するタインの形状を検出するセンサを具備する。
(もっと読む)
コンバインの脱穀用補助搬送装置

【課題】刈取装置とその後方の脱穀装置との間に配置される中継搬送機構からなるコンバインの脱穀用中継搬送装置による手扱作業において、作業者が搬送異常に対応して修正操作をする場合や作業者に非常事態が及んだ場合でも、確実な緊急停止を可能とする脱穀用中継搬送装置を提供する。
【解決手段】コンバインの脱穀用中継搬送装置は、刈取装置3の搬送部3aから受けた刈取穀稈を脱穀装置4の扱室4bの入口で中継支持することにより同脱穀装置4のフィードチェーン4aに刈取穀稈を渡す中継部材11,12から構成され、上記扱室4bの入口部でその上方から投入された刈取穀稈を受けて後方側に移送する補助搬送装置13をフィードチェーン4aに引渡し可能に設け、この補助搬送装置13の近傍に復帰式押ボタンスイッチ14を設け、その操作信号を条件として走行停止下における補助搬送装置13の搬送動作を可能とするものである。
(もっと読む)
コンバイン
【課題】畦際等で刈取部を上昇させても、特別な操作を要することなくこの畦際の穀稈を刈り取ることができるものとし、刈取作業の能率を高める。
【解決手段】刈取部(4)の非作業高さへの上昇が検出され且つ行車体(1)の所定速度よりも速い走行速度が検出された場合は刈取搬送装置(10)の駆動を無条件に停止させ、刈取部(4)の非作業高さへの上昇が検出されても所定速度以下の走行速度が検出された場合には、この検出の時点から刈取搬送装置(10)によって刈取後の穀稈が所定距離搬送されるまでの間または所定時間が経過するまでの間、刈取搬送装置(10)の駆動を継続した後に該刈取搬送装置(10)の駆動を自動的に停止させる刈取搬送制御装置(11)を設ける。
(もっと読む)
コンバインの刈取搬送装置
【課題】刈取部における穀稈の詰まりを正確に感知できるものとし、刈取作業の能率を高める。
【解決手段】複数条の穀稈を刈り取る刈取装置(9)と、刈取後の穀稈穂先側を係止搬送する穂先側搬送装置(11)及び刈取後の穀稈株元側を挟持搬送する株元側搬送装置(12)を備え、これら穂先側搬送装置(11)及び株元側搬送装置(12)により複数条の搬送穀稈を合流させた後、この合流した穀稈を後方の脱穀部(3)側へ搬送する左右の搬送経路(A,B)をもつコンバインにおいて、左右の搬送経路(A,B)の合流部(C)には穂先側搬送装置(11)の下側近くにおいて搬送穀稈の詰まりを検出する詰まり検出センサ(18)を設ける。
(もっと読む)
コンバイン
【課題】穂先の扱深状態を扱深さ移動方向視認用マークによって視認し易くし、扱深さ操作方向視認マークにより扱深手動スイッチの視認操作を行い易くし、手動による扱深調整を適切に行うことができるコンバインを提供する。
【解決手段】前処理部で刈取られた穀稈を、扱深手動スイッチの浅扱ぎ側及び深扱ぎ側への操作によって扱深搬送部を作動させて扱深調整をし、脱穀入口42に適正扱深で供給搬送させるコンバインであって、前記脱穀入口42に、搬送されてくる穀稈の穂先位置に対して浅扱ぎ方向と深扱ぎ方向とを運転部7より視認可能な扱深さ移動方向視認用マーク45を表示すると共に、扱深手動スイッチには、浅扱ぎ操作状態と深扱ぎ操作状態とを扱深さ移動方向視認用マーク45と同じ態様で視認可能に表す扱深さ操作方向視認マークを表示した。
(もっと読む)
コンバインの刈取搬送装置
【課題】刈取穀稈を円滑に搬送できるものとしてコンバインによる刈取作業の能率を向上させる。
【解決手段】左右根元挟持搬送装置(18,18)の合流部に接続するように後部穂先係止搬送装置(19)及び後部根元搬送装置(20)を設ける。また、後部穂先係止搬送装置(19)を、後部穂先係止搬送ベルト(19a)と、対向する後部穂先搬送ガイド杆(19b)により構成し、後部穂先搬送ガイド杆(19b)の始端側を搬送フレーム(14)に軸支し、後部穂先搬送ガイド杆(19b)の終端側をバネ(22)により後部穂先係止搬送ベルト(19a)に接近する側に押圧付勢する。
(もっと読む)
1 - 6 / 6
[ Back to top ]