
Fターム[2B084CE03]の内容
収穫機の構成要素−穀稈搬送 (1,447) | 扱深さ制御の作動形態 (18) | 自動調節を行うもの (18)
Fターム[2B084CE03]の下位に属するFターム
手動への切換 (2)
Fターム[2B084CE03]に分類される特許
1 - 16 / 16
コンバイン
【課題】刈取装置の搬送装置から脱穀装置の供給搬送装置への穀稈の引継ぎを円滑化する。
【解決手段】供給搬送装置(17)の内側に、走行装置(2)の走行速度に同調して駆動され、前記搬送装置(H)の搬送終端部から穀稈を受継ぐ引継搬送装置(25)を設け、引継搬送装置(25)の後部に備える横軸(28a)を支点として引継搬送装置(25)の前部を上下に回動させる姿勢変更機構(41)を設け、搬送装置(H)における穀稈の詰りを検出する詰り検出センサ(43)が穀稈の詰りを検出した場合に、姿勢変更機構(41)を作動させて搬送装置(H)の搬送終端部と引継搬送装置(25)の搬送始端部とが上下に離間するように引継搬送装置(25)を回動させる構成とする。
(もっと読む)
コンバインの穀稈供給装置

【課題】本発明では、多量の穀稈を刈り取って脱穀するコンバインにおいて、刈取穀稈が少ない場合にも扱ぎ深さを適正に維持して良好な脱穀を継続できるようにすることを課題とする。
【解決手段】刈取装置(6)の搬送経路に穀稈穂先センサ(32a,32b)を設け、該穀稈穂先センサ(32a,32b)で検出する穀稈の穂先位置に応じて扱深さ調節用搬送装置(15)の挟持位置を変更して脱穀装置(4)に穀稈を供給するコンバインにおいて、
刈取装置(6)の前側位置に刈取穀稈を条毎に検出する穀稈センサ(31a,31b,…)を設け、該穀稈センサ(31a)のうち少なくとも何れか一つが穀稈を検出しない場合には、全ての穀稈センサ(31a,31b,…)が穀稈を検出している場合に比べて浅扱ぎ側に変更する強制浅扱ぎ制御とすることを特徴とするコンバインの穀稈供給装置とする。
(もっと読む)
電動コンバイン
【課題】穂先側を搬送する上部搬送装置にアクチュエータを設けて、その搬送速度を調節送する電動コンバインの提供。
【解決手段】車両に原動機およびバッテリーを搭載し、原動機および電動モータM7の各駆動源によって、車両の走行部と、刈取部を含む複数の処理部からなる作業部とを駆動し、走行部は、電動モータの動力で駆動させるとともに、作業部は、電動モータM7の動力で駆動させるアクチュエータ駆動部と、原動機の動力により駆動させる原動機駆動部とを備え、アクチュエータ駆動部は、刈取部を含み、刈取部を構成する、刈取穀稈の穂先を係止搬送する上部搬送装置と、刈取穀稈の株元を挟扼搬送する縦搬送装置とには、これら装置を駆動させるアクチュエータM7などを各別に設けるとともに、上部搬送装置は、刈取穀稈の搬送姿勢を調節する姿勢調節手段を備えた。
(もっと読む)
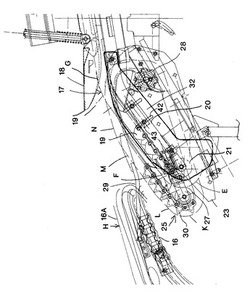
コンバインの前処理部
【課題】直線作動機の伸縮作動によって扱深搬送体を安定的に上下揺動させ、穀稈の扱深さをスムーズに変更できるコンバインの前処理部を提供することを課題としている。
【解決手段】刈取られて後方搬送される穀稈の搬送経路の途中に扱深搬送体19を配置し、伸縮作動によって扱深搬送体19を上下揺動駆動させる上下方向の直線作動機29を設け、扱深搬送体19の上下揺動によって変えることにより穀稈の扱深さを変更するコンバインの前処理部において、扱深搬送体19側に動力を伝動する伝動機構が内装されてフレーム部の一部を構成する伝動ケース4から上方側に突出形成された支持フレーム33に前記直線作動機29の上端側を連結支持する一方で、扱深搬送体19の下面側における上記支点よりも後方側に、前記直線作動機29の下端側を連結支持し、直線作動機29の伸長作動によって扱深搬送体19を浅扱ぎ側である下方側に揺動させた。
(もっと読む)
コンバイン
【課題】収穫作業の開始時には刈取クラッチの入り操作を確実に行い、必要に応じて脱穀クラッチのみの入り操作も可能なコンバインを構成する。
【解決手段】作業クラッチレバー45が、切り位置OFFと、脱穀作業位置Mと、収穫作業位置ONとに操作自在に構成され、この操作を検出する脱穀位置センサ64と収穫位置センサ65とを備えている。これらのセンサの検出結果から脱穀クラッチCeと刈取クラッチCdとを制御するクラッチ制御手段87を備えている。クラッチ制御手段87は、作業クラッチレバー45を切り位置OFFから収穫作業位置ONに操作する際に、脱穀作業位置Mを通過する際に脱穀クラッチCeを入り状態に設定せず、収穫作業位置ONにおいて脱穀クラッチCeと刈取クラッチCdとを入り状態に設定する。
(もっと読む)
コンバインの穀稈供給深さ調節用搬送装置
【課題】穀稈供給調節用搬送装置の着脱を簡単に行えるものとし、メンテナンスの能率を向上させる。
【解決手段】入力軸(21)を内装した入力側伝動ケース(22)と、穀稈供給深さ調節用搬送装置(12)への出力軸(23)を入力軸(21)と平行に内装した出力側伝動ケース(24)とからなり、穀稈供給深さ調節用搬送装置(12)は、出力軸(23)を回動中心として回動可能に構成し、入力側伝動ケース(22)と出力側伝動ケース(24)は、入力軸(21)と出力軸(23)との間で分割されて左右横方向に接合分離自在に構成する。
(もっと読む)
コンバイン
【課題】穂先の扱深状態を扱深さ移動方向視認用マークによって視認し易くし、扱深さ操作方向視認マークにより扱深手動スイッチの視認操作を行い易くし、手動による扱深調整を適切に行うことができるコンバインを提供する。
【解決手段】前処理部で刈取られた穀稈を、扱深手動スイッチの浅扱ぎ側及び深扱ぎ側への操作によって扱深搬送部を作動させて扱深調整をし、脱穀入口42に適正扱深で供給搬送させるコンバインであって、前記脱穀入口42に、搬送されてくる穀稈の穂先位置に対して浅扱ぎ方向と深扱ぎ方向とを運転部7より視認可能な扱深さ移動方向視認用マーク45を表示すると共に、扱深手動スイッチには、浅扱ぎ操作状態と深扱ぎ操作状態とを扱深さ移動方向視認用マーク45と同じ態様で視認可能に表す扱深さ操作方向視認マークを表示した。
(もっと読む)
コンバインの穀稈供給調節装置
【課題】搬送穀稈の穂部と稈部との境界を検出する境界検出センサにより刈取条数を検出し、脱穀装置の選別部の調節制御を合わせて行ない選別精度を向上させる。
【解決手段】反射光による周波数分析を行いその周波数の差により穀稈の穂部Uと稈部Vとの境界Wを検出する境界検出センサ6を設け、境界検出センサ6の検出値である搬送穀稈の表面からの反射光の距離により予め設定した刈取条数と穀稈層厚から刈取条数を検出し、脱穀装置の唐箕の選別風量を大・小に調節する。
(もっと読む)
刈取穀稈の穂先位置検出方法
【課題】本発明では、コンバインの穀稈位置検出センサにおいて、取付位置調整頻度を少なくし、位置調整も容易な穀稈位置検出手段を提供することを課題とする。
【解決手段】搬送装置14の上側に一個の距離測定センサ1を設け、この距離測定センサ1で少なくとも穀稈の株元側と穂先側の二箇所の距離測定を交互に時系列で行い、穀稈までの距離によって穀稈の層厚を算出し、該層厚から穀稈の穂先位置を推測すべくしてコンバインの穀稈位置検出手段を構成した。
(もっと読む)
コンバイン
【課題】刈り終いのときに、穀稈搬送手段34(穀稈搬送装置)の搬送終端側の穀稈受継部等で稈こぼれ又は稈詰りが発生するのを防止でき、穀稈搬送手段34の搬送性能を向上できるようにしたコンバインを提供するものである。
【解決手段】エンジン14によって作動する走行部2を備えた走行機体と、圃場に植立した穀稈の株元を切断する刈刃装置222と、前記刈刃装置222によって株元が切断された前記穀稈を搬送する穀稈搬送手段34とを備えてなるコンバインにおいて、前記穀稈搬送手段34を作動する搬送駆動用電動モータ92と、前記穀稈の刈り終いを検出する刈り終いセンサ287とを備え、前記穀稈の刈り終いが検出されたときに、前記穀稈搬送手段34を高速で作動するように構成したものである。
(もっと読む)
コンバイン
【課題】センサを設けず、扱深調整搬送体の移動を機械構成上又は制御上の不都合が生じない所定範囲に規制する。
【解決手段】前処理部で刈り取られた穀稈を脱穀部に向けて扱深さ調整可能に搬送する扱深調整搬送体と、該扱深調整搬送体を浅扱ぎ方向及び深扱ぎ方向に駆動させるアクチュエータと、扱深制御を行う制御部とを備え、制御部が扱深調整搬送体をインチング駆動又は連続駆動させるコンバインにおいて、前記扱深調整搬送体が浅扱ぎ方向と深扱ぎ方向の内の一方向に所定回数以上インチング駆動又は所定時間以上連続駆動されると、それ以降、制御部が、浅扱ぎ方向と深扱ぎ方向の両方向に扱深調整搬送体をインチング駆動又は連続駆動させることが可能な通常駆動モードから所定回数以上インチング駆動又は所定時間以上連続駆動された方向に扱深調整搬送体をインチング駆動又は連続駆動させない変則駆動モードに移行する。
(もっと読む)
コンバイン
【課題】刈取作業の終了時に穀稈の稈長が短くなるような場合でも、穀稈の受け継ぎ不良によるコボレを確実に防止できるコンバインを提供することを目的とする。
【解決手段】刈取部3で刈り取られた刈取穀稈の株元側を受け継いで搬送し、脱穀部5のフィードチェーン6に受け継ぐ株元搬送チェーン42と、該刈取穀稈の穂先側を受け継いで搬送し、フィードチェーン6に受け継ぐ穂先搬送タイン41と、を備え、扱深さ調節装置40(穂先搬送タイン41、株元搬送チェーン42)が上下回動されて扱深さ調節可能とするコンバイン100において、リミットスイッチ51が前記刈取穀稈を扱深さ調節装置40(穂先搬送タイン41、株元搬送チェーン42)へ受け継ぐ位置よりも搬送方向上流側に設けられ、リミットスイッチ51が穀稈の無いことを検知すると、扱深さ調節装置40(穂先搬送タイン41、株元搬送チェーン42)が深扱ぎ側へ回動されるものである。
(もっと読む)
コンバイン
【課題】コンバインにおいて、例えば刈取穀稈量の多寡にも確実に対応して搬送乱れや稈こぼれを防止し、フィードチェン6への刈取穀稈の受け継ぎ効率をより一層高める。
【解決手段】縦搬送機構とフィードチェン6との間に配置された縦回し式の第2中継搬送機構55を、送り後方側の長軸ボルト134を支点として上下方向に姿勢変更回動可能に構成する。更に、フィードチェン6に向かう刈取穀稈量を検出する搬送量検出手段としてのアーム位置検出センサ106と、アーム位置検出センサ106の検出情報に応じて第2中継搬送機構55を上下回動させるアクチュエータとしての電動モータ143とを備える。
(もっと読む)
コンバイン
【課題】刈始めに際し、方向自動制御による操向クラッチ出力が手動操作による操向クラッチ出力に重なることを回避し、出力の重複によってオペレータの操作フィーリングが低下するという問題を解消する。
【解決手段】刈取穀稈を分草するデバイダ8と、刈取穀稈に対するデバイダ8の位置を検出する方向センサ18と、方向センサ18の検出信号に応じて機体の走行方向を自動的に制御する方向自動制御部21とを備えるコンバイン1において、方向センサ18の位置よりも下流の穀稈搬送経路で搬送穀稈を検出する搬送穀稈検出センサ(扱深メインセンサ17)を備え、該搬送穀稈検出センサのONを方向自動制御の開始条件とする。
(もっと読む)
コンバイン
【課題】 分草装置8や引起装置9を畦に干渉させることなく、刈刃10を畦に接近させてこの畦際の植立穀稈を円滑に刈り取ることができるものとする。
【解決手段】 刈取部4の上部に配置する回動軸心Sを支点として分草装置8と引起装置9とを一体的に上下回動自在に構成する。そして、分草装置8と引起装置9との上方回動に関連して、扱ぎ深さ自動制御手段Tによる扱ぎ深さの自動制御状態を解除ないし中断させる。または、扱ぎ深さ自動制御手段Tにおける目標の扱ぎ深さを所定量だけ深扱ぎ側に補正する。また、分草装置8と引起装置9との下方回動に関連して、扱ぎ深さ自動制御手段Tによる扱ぎ深さの自動制御状態を開始ないし再開させる。または、扱ぎ深さ自動制御手段Tにおける目標の扱ぎ深さを所定量だけ浅扱ぎ側に補正する。
(もっと読む)
コンバインの刈取装置
【課題】圃場の穀稈を稈長に関らず搬送装置で確実に取り込み、穀稈のこぼれを防止する。
【解決手段】左右一対のデバイダ31・31と、該デバイダ31・31の後方に配設する左右一対の搬送装置32と、該搬送装置32の下方に配設する刈刃35とを一つの刈取ユニット20として、該刈取ユニット20を複数備えるコンバインの刈取装置において、前記搬送装置32に下搬送ケース33と該下搬送ケース33の上方に配置される上搬送ケース34とを備え、該上搬送ケース34を下搬送ケース33に対し昇降可能に構成した。
(もっと読む)
1 - 16 / 16
[ Back to top ]