
Fターム[2B084CJ30]の内容
収穫機の構成要素−穀稈搬送 (1,447) | 扱深さ制御に関する表示、警報 (5) | その他 (3)
Fターム[2B084CJ30]に分類される特許
1 - 3 / 3
コンバインの前処理部
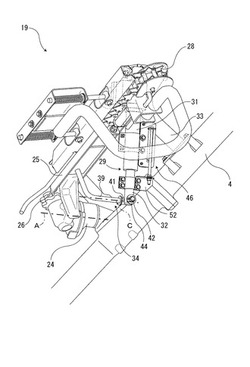
【課題】直線作動機の伸縮作動によって扱深搬送体を安定的に上下揺動させ、穀稈の扱深さをスムーズに変更できるコンバインの前処理部を提供することを課題としている。
【解決手段】刈取られて後方搬送される穀稈の搬送経路の途中に扱深搬送体19を配置し、伸縮作動によって扱深搬送体19を上下揺動駆動させる上下方向の直線作動機29を設け、扱深搬送体19の上下揺動によって変えることにより穀稈の扱深さを変更するコンバインの前処理部において、扱深搬送体19側に動力を伝動する伝動機構が内装されてフレーム部の一部を構成する伝動ケース4から上方側に突出形成された支持フレーム33に前記直線作動機29の上端側を連結支持する一方で、扱深搬送体19の下面側における上記支点よりも後方側に、前記直線作動機29の下端側を連結支持し、直線作動機29の伸長作動によって扱深搬送体19を浅扱ぎ側である下方側に揺動させた。
(もっと読む)
コンバイン

【課題】穂先の扱深状態を扱深さ移動方向視認用マークによって視認し易くし、扱深さ操作方向視認マークにより扱深手動スイッチの視認操作を行い易くし、手動による扱深調整を適切に行うことができるコンバインを提供する。
【解決手段】前処理部で刈取られた穀稈を、扱深手動スイッチの浅扱ぎ側及び深扱ぎ側への操作によって扱深搬送部を作動させて扱深調整をし、脱穀入口42に適正扱深で供給搬送させるコンバインであって、前記脱穀入口42に、搬送されてくる穀稈の穂先位置に対して浅扱ぎ方向と深扱ぎ方向とを運転部7より視認可能な扱深さ移動方向視認用マーク45を表示すると共に、扱深手動スイッチには、浅扱ぎ操作状態と深扱ぎ操作状態とを扱深さ移動方向視認用マーク45と同じ態様で視認可能に表す扱深さ操作方向視認マークを表示した。
(もっと読む)
コンバイン
【課題】 分草装置8や引起装置9を畦に干渉させることなく、刈刃10を畦に接近させてこの畦際の植立穀稈を円滑に刈り取ることができるものとする。
【解決手段】 刈取部4の上部に配置する回動軸心Sを支点として分草装置8と引起装置9とを一体的に上下回動自在に構成する。そして、分草装置8と引起装置9との上方回動に関連して、扱ぎ深さ自動制御手段Tによる扱ぎ深さの自動制御状態を解除ないし中断させる。または、扱ぎ深さ自動制御手段Tにおける目標の扱ぎ深さを所定量だけ深扱ぎ側に補正する。また、分草装置8と引起装置9との下方回動に関連して、扱ぎ深さ自動制御手段Tによる扱ぎ深さの自動制御状態を開始ないし再開させる。または、扱ぎ深さ自動制御手段Tにおける目標の扱ぎ深さを所定量だけ浅扱ぎ側に補正する。
(もっと読む)
1 - 3 / 3
[ Back to top ]