
Fターム[2B084DN07]の内容
収穫機の構成要素−穀稈搬送 (1,447) | 扱深さ自動制御における制御特性 (13) | 刈取作業終了時に特性 (3)
Fターム[2B084DN07]に分類される特許
1 - 3 / 3
コンバイン
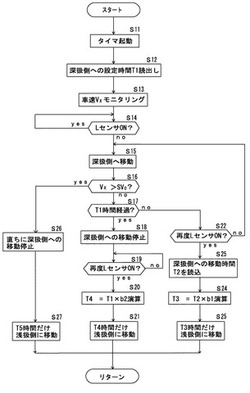
【課題】圃場内での枕土での回行作業時、扱深さ収納制御後において、縦搬送装置が最適な扱き位置まで戻す時間を短縮できるようにする。
【解決手段】刈取前処理装置と脱穀装置との間に配置された穀稈有無センサ122が穀稈通過なしを検出すると(S14:no) 、扱深さ制御モータを深扱側に駆動し、穀稈穂先部を深扱側に変位させる(S15) 。そして、車速Vxが予め設定されている所定の設定車速Svo より速い場合(16:no) 、「深扱側への駆動設定時間T1」が経過したか否かを判別する(S17) 。駆動設定時間T1を経過している場合(S17、yes)、縦搬送装置40の深扱側への移動停止する(S18) 。回行後、刈取前処理装置を設定された刈取高さまで下降させ、穀稈の刈取が開始される。再度、穀稈有無センサ122がONとなれば(S19、yes)、浅扱側に移動すべき時間T4を演算し(S20) 、そして、時間T4( <T1) だけ、浅扱側に扱深さ制御モータを駆動させる(S21) 。
(もっと読む)
コンバイン

【課題】刈り終いのときに、穀稈搬送手段34(穀稈搬送装置)の搬送終端側の穀稈受継部等で稈こぼれ又は稈詰りが発生するのを防止でき、穀稈搬送手段34の搬送性能を向上できるようにしたコンバインを提供するものである。
【解決手段】エンジン14によって作動する走行部2を備えた走行機体と、圃場に植立した穀稈の株元を切断する刈刃装置222と、前記刈刃装置222によって株元が切断された前記穀稈を搬送する穀稈搬送手段34とを備えてなるコンバインにおいて、前記穀稈搬送手段34を作動する搬送駆動用電動モータ92と、前記穀稈の刈り終いを検出する刈り終いセンサ287とを備え、前記穀稈の刈り終いが検出されたときに、前記穀稈搬送手段34を高速で作動するように構成したものである。
(もっと読む)
コンバイン
【課題】 分草装置8や引起装置9を畦に干渉させることなく、刈刃10を畦に接近させてこの畦際の植立穀稈を円滑に刈り取ることができるものとする。
【解決手段】 刈取部4の上部に配置する回動軸心Sを支点として分草装置8と引起装置9とを一体的に上下回動自在に構成する。そして、分草装置8と引起装置9との上方回動に関連して、扱ぎ深さ自動制御手段Tによる扱ぎ深さの自動制御状態を解除ないし中断させる。または、扱ぎ深さ自動制御手段Tにおける目標の扱ぎ深さを所定量だけ深扱ぎ側に補正する。また、分草装置8と引起装置9との下方回動に関連して、扱ぎ深さ自動制御手段Tによる扱ぎ深さの自動制御状態を開始ないし再開させる。または、扱ぎ深さ自動制御手段Tにおける目標の扱ぎ深さを所定量だけ浅扱ぎ側に補正する。
(もっと読む)
1 - 3 / 3
[ Back to top ]