
Fターム[2B102AC07]の内容
家畜、動物の飼育(給餌、給水) (908) | 給与機器 (61) | 牧草(乾草、ベール等) (7)
Fターム[2B102AC07]に分類される特許
1 - 7 / 7
給餌装置
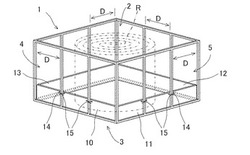
【課題】牛等の家畜の飼料の食べ残しを減らすことができ、飼料の無駄を防止できる給餌装置を提供する。
【解決手段】給餌装置は、複数の横棒材及び縦棒材b1〜b20を連結することで上部開口2、下部開口3及び複数の側部開口4〜7を形成した柵体1と、柵体1の側部開口の下部を覆う板材10〜13とを備え、上部開口2及び下部開口3は所定の開口面積を有しており、側部開口4〜7は縦棒材により所定の水平方向の間隔Dを有しており、板材は、柵体1の側面に平行で、かつ紐15(支持手段)により柵体と鉛直方向に相対移動可能に支持されている。間隔Dは餌を与える家畜の首又は頭部の幅に対応して設定され、所定の開口面積はロールベール等の飼料の大きさに対応して設定される。
(もっと読む)
給餌装置

【課題】少量でも精確に粗飼料が定量供給される粗飼料給餌装置を提供する。
【解決手段】粗飼料給餌装置において、計量槽における計量の前工程として、半球形鏡板状または皿形鏡板状の網を有する振動篩を備えることを特徴とし、前記鏡板状の網が網の平面直径100cmに対し深度が1cm〜50cmの半球形または皿形であることが好ましく、該網の網目の大きさが、10mm〜35mmであることが好ましい。更に前記振動篩の前工程として、クロスバーを有する複数の回転フォークを有し、隣接する回転フォークが相互に逆方向の部分回転往復運動をする粗飼料供給部を備えることが好ましく、前記回転フォークは、直交する4本のクロスバーを有し、前記部分回転往復運動が90°回転の往復運動であることが好ましい。
(もっと読む)
乾草・サイレージ自動給餌方法
【課題】自動給餌機の1つの粗飼料用タンクによって、サイレージと乾草とを切替えて給餌することができ、粗飼料切替時に粗飼料用タンクを空にすることができる乾草・サイレージ自動給餌システムを提供する。
【解決手段】自動給餌機5の空の粗飼料用タンク21に1種類の粗飼料24を満載すると共に、その満載までの満載搭載時間T0を計測し、次に、満載した粗飼料タンク21により給餌した各牛への給餌量を加算して粗飼料用タンク21の満載積載量M0を算出し、一方、残りの各牛への必要給餌量Mmを算出し、満載搭載時間T0と、満載積載量M0と、必要給餌量Mmとから、必要搭載時間Tmを算出し、必要搭載時間Tmに基づき、粗飼料用タンク21に粗飼料24を必要給餌量Mm搭載し、残りの各牛へ給餌した時、給餌終了時に粗飼料用タンク21が空になるようにする。
(もっと読む)
移動装置、及び、その移動装置と家畜小屋とを有する組立体
移動装置は、移動可能な支持物と、その支持物(1)に固定されている物を保持するための保持装置とで構成されている。その保持装置は、支持物に(1)に取り外し可能に固定されている。そして、そのような移動装置と、子牛が横たわったり歩行したりする場所および子牛用の処置場所がある家畜小屋とを有する組立体において、その保持装置がグリッパ装置、または子牛を入れるためのコンテナである。 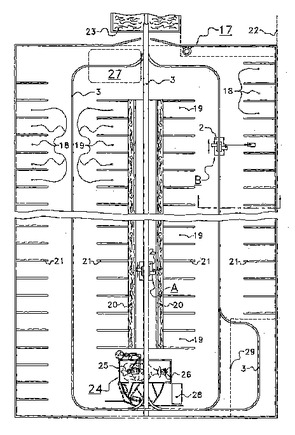 (もっと読む)
(もっと読む)
搾乳ロボット給餌所及び物質を把持し移動する装置を備える搾乳ロボットの組立体
本発明は、搾乳ロボットの給餌所(例、搾乳ロボット給餌桶)及び物質(例、動物の粗飼料及び/又は濃厚飼料)の把持・移動を行なう把持装置を備える搾乳ロボットの組立体を提供する。把持装置は、物質を把持・移動し、次に供給する把持部(2)を備えている。把持装置は制御手段を備え、制御手段で、把持部(2)を搾乳ロボットへ移動及び搾乳ロボットの搾乳ロボット給餌所に物質を供給する把持部の制御を行なう。 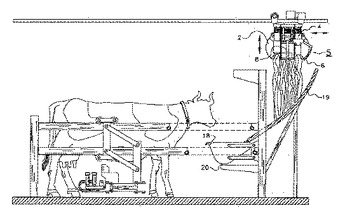 (もっと読む)
(もっと読む)
自動給餌装置
【課題】走行中に連続的に飼料を排出可能な自動給餌装置を提供すること。
【解決手段】本発明の自動給餌装置Sは、粗飼料を含んだ飼料Fが投入されたタンク1を、自動走行手段41により所定軌道を走行させつつ、タンク1内の攪拌スクリュー15により攪拌された飼料Fを、タンク1下部に配設される排出部28から排出させることにより、家畜等に自動的に給餌可能な構成である。排出部28が、タンク1の底壁12側に配設される開口12aを開閉可能に構成されるシャッター29と、開口12aの下方に配設されて開口12aから排出された飼料Fを移動可能に構成されるベルトコンベヤ34と、から構成される。ベルトコンベヤ34が、可逆回転可能とされて、シャッター29の開き時に開口12aから落下された飼料Fを、タンク1の走行方向と直交する両方向側に配設される排出口36から排出可能に、構成されている。
(もっと読む)
ロールベール用草架
【課題】ロール載置作業の作業性が高く、ロール直径に拘りなく、ロールベールをロール載置領域の中心部に、確実に位置決め可能なロールベール用草架を提供する。
【解決手段】ロールベール11を底板12のロール載置領域Aに縦置きするので、ロールベール11の載置時、グラブによりロールベール11を掴む作業性が高まる。また、ロール載置領域Aに載置されたロールベール11は、位置変更手段16によるロール位置決めガイド15の取り付け位置の変更に伴って、ロール直径の大小に拘わりなく、ロール載置領域Aの中心部に、確実に位置決めされる。
(もっと読む)
1 - 7 / 7
[ Back to top ]