
Fターム[2B105AJ01]の内容
漁撈(漁撈機械) (398) | 漁獲方法、製造方法、補修、配置 (33) | 漁獲方法 (28)
Fターム[2B105AJ01]に分類される特許
1 - 20 / 28
貝類の吸引式採取装置
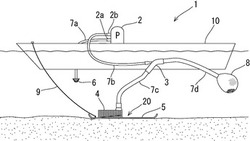
【課題】コンパクトで、かつ、極めて効率よく貝類を採取することができ、砂の吸引による目詰まりの問題を可及的に回避することができる貝類の吸引採取装置を提供する。
【解決手段】作業船上に設置されたポンプ2と、ポンプ2の吸入口2aに接続された海水吸引用ホース7aと、ポンプ2の排出口2bに接続された海水吐出用ホース7bと、海水吐出用ホース7bの先端に接続されたエジェクター3と、エジェクター3に接続された貝類吸引用ホース7c及び貝類吐出用ホース7dと、貝類吸引用ホース7cの先端に接続された鋤簾4と、貝類吐出用ホース7dの先端に接続された回収ネット8と、鋤簾4が載置される橇5とによって、貝類の吸引採取装置1を構成した。
(もっと読む)
イカ釣り漁具

【課題】釣糸の投下の間中断なくイカを釣り上げること可能にする釣具を提供する。
【解決手段】複数の発光疑似餌21を左舷12から右舷11に左舷回転車121または右舷回転車111により回転する釣糸20に取り付け、右舷11から最下部までは発光が停止し、最下部を過ぎ釣糸20が海上に向けて上向きの位置から左舷12の甲板までは発光するイカ釣り漁具である。
(もっと読む)
釣り針及び魚釣り装置
【課題】 いったん針に掛かった魚を針から外れないようにするとともに、掛かった魚を取り外しやすくした釣り針と、その釣り針を使用した、魚を自動的に釣り上げて自動的に針から外すことのできる魚釣り装置を提供する。
【解決手段】 釣り針1は、針本体10と、先端部が針本体10の針先部に近接する近接位置と離隔する離隔位置との間で変位可能な外れ止めクロスバー20と、外れ止めクロスバー20を離隔位置に付勢する付勢部材30と、主糸3及び副糸4を備える。主糸3は、針本体10に係合するとともに外れ止めクロスバー20に接続されて、針本体10にかかった魚の力を受けて張力を付与されると、付勢部材30の付勢力に打ち勝って外れ止めクロスバー20を近接位置に変位させるとともに魚を釣り上げる。副糸4は、針本体10の湾曲部と根元部のつなぎ部分に接続されており、別途の手段により張力を付与されると、針先部を下方に向けて魚を外す。
(もっと読む)
クラゲ破砕装置
【課題】漁撈時に、効率良くクラゲ破砕作業を行うことができるクラゲ破砕装置を提供する。
【解決手段】クラゲ6を吸込導入するクラゲ流通路8cが形成されたガイド体8a、が設けられた筒状のケーシング8と、該ケーシング8内に設けられ、ガイド体8a側からクラゲ6を吸い込みクラゲ6を破砕するスクリュー部9aが形成された回転自在なスクリュー移送体9と、該スクリュー移送体9を回転駆動するエアモータ10と、を備えるクラゲ破砕装置1であって、スクリュー移送体9の回転軸9bに、ガイド体8aのクラゲ流通路8cの海水に渦流を発生させるための攪拌羽根部9cを設け、ガイド体8aの内周面に破砕突起部材11を、内周面近傍に破砕ワイヤ12を設けた。
(もっと読む)
減揺装置の貫通した筒を利用した釣船用魚捕獲装置
【課題】 船舶の停泊時に貫通した筒を水中に該筒の下端部の開口部から水を入れながら垂直に降ろし、該筒の上側部を前記船に固定して一体化させたことで、振り子の様な横揺れとなる横移動には該筒が水を切る抵抗力と該筒の中に留まっている水自体の重量により横移動が抑制させる減揺装置を、魚の捕獲にも利用できるように応用発展させた装置を提供する事。
【解決手段】 本発明は、減揺装置の貫通した筒の中は波の影響が無く平面を保っており、水中がよく見通せて釣りをするのに恵まれた条件であり、更に該筒の下端部に網状の蓋と該蓋を自在に開閉できるレバーを該筒の上端部に設けたことで、筒の中まで魚を取り込んでから前記の蓋をすることで魚を完全に捕獲できるようにしたものである。
(もっと読む)
釣り針及び魚釣り装置
【課題】 いったん針に掛かった魚を針から外れないようにするとともに、掛かった魚を取り外しやすくした釣り針と、その釣り針を使用した、魚を自動的に釣り上げて自動的に針から外すことのできる魚釣り装置を提供する。
【解決手段】 釣り針1は、針本体10と、先端部が針本体10の針先部に近接する近接位置と離隔する離隔位置との間で変位可能な外れ止めクロスバー20と、外れ止めクロスバー20を離隔位置に付勢する付勢部材30と、主糸3及び副糸4を備える。主糸3は、針本体10に係合するとともに外れ止めクロスバー20に接続されて、針本体10にかかった魚の力を受けて張力を付与されると、付勢部材30の付勢力に打ち勝って外れ止めクロスバー20を近接位置に変位させるとともに魚を釣り上げる。副糸4は、針本体10の湾曲部と根元部のつなぎ部分に接続されており、別途の手段により張力を付与されると、針先部を下方に向けて魚を外す。
(もっと読む)
巨大クラゲの食材部分採取装置
【課題】 大量の巨大クラゲの食材部分を効率的に採取し、供給できる装置を提供することを課題としている。
【構成】 海流に乗って遊泳してくる巨大クラゲを集めるガイド網と、前記ガイド網により集められた巨大クラゲを浮上させながら切断装置の入口に誘導する誘導網と、前記誘導網によって浮上してきた巨大クラゲの傘上面略中央の位置を認識する認識手段と、前記認識手段により認識された略中央部分を捕獲する捕獲手段と、該巨大クラゲの傘を広げて固定する固定する手段と、前記捕獲固定された巨大クラゲの食材部分と非食材部分を分離切断する前記切断装置と、非食材部分を海中に放出し、食材部分を収納ボックスに収納する収納手段を具備したことを特徴とする。
(もっと読む)
自動イカ釣装置
【課題】巻上げ及び巻下げの回転速度を高くすることができ、かつ釣果も高めることができる自動イカ釣装置を提供する。
【解決手段】釣り糸が巻回されている巻き取り部の軸断面形状が円形である少なくとも1つの丸型回転ドラムと、少なくとも1つの丸型回転ドラムを回転駆動する少なくとも1つの駆動モータと、少なくとも1つの駆動モータの回転を制御する制御手段とを備えており、この制御手段は、釣り糸が巻下げされる際の駆動モータの回転速度を所定パターンで高速回転及び低速回転となるように制御するように構成されている。
(もっと読む)
魚釣り漁法
【課題】従来の底立てはえ縄漁法はサガリカゴと呼ばれている、魚釣用仕掛け投入用の投入器を使用していた、そのため、釣り針数や魚釣仕掛け数も一定で、刻一刻と変化する海況や魚群の大小に臨機応変に対処できなかった、また、漁労面でも重くかさばり安定が悪いため危険がともない、若年漁労従事者の定着率が悪かった要因ともなっていた。
漁業経営面では効率の良い漁獲ができないため、無駄な漁具の消費、航海日数伸びによる漁獲物の鮮度低下、燃料の消耗等、経費の割りに利潤が上がらなかった。
【解決手段】陸上にて仕掛け投入用掛枠に釣数の異なる数種類の魚釣用仕掛けを巻き込み、この釣り針に餌を付けて置き、操業時にこの魚釣用仕掛け下端にオモリ、同上端に浮子を取り付け、この浮子を幹縄に掛着する、あるいは、この魚釣用仕掛けを、幹縄にあらかじめ取り付けておいた浮子に掛着する、このようにすればサガリカゴは不要になり、労働の軽減や適格な種類漁具の使用が可能となり、効率の良い漁業が提供できる。
(もっと読む)
集魚灯装置および集魚灯装置を用いた漁具並びに漁法
【課題】長時間に亘り安全に連続的に点灯させることのできる集魚灯装置を提供し、当該集魚灯装置を用いて夜間における魚の集光性に基づいて魚を効率良く捕獲することのできる漁具並びに漁法を提供することを目的とする。
【解決手段】集魚灯11と集魚灯11に電力を供給する電源部9とを備えた集魚灯装置8であって、前記電源部9は気密・水密に開閉自在なケース12内に、前記集魚灯11に電力を供給するバッテリ14と、当該バッテリ14より漏洩する有害ガスを前記ケース12外に排出させるエアポンプ17とを有することを特徴とする。
(もっと読む)
魚を捕獲するためのシステム及びその使用方法
【解決手段】 本発明は、魚を捕獲するために使用される気泡の壁を形成するシステムに関する。本システムは、少なくとも2つのボート(15)(16)と、2以上のチャンバと、吸引ポンプ(17)と、コンプレッサ(8)と、気泡の壁を形成するデバイス(7)とから構成される。デバイス(7)は、1以上の気泡形成チャンバと、1以上の誘導チャンバと、導管と、浮動管と、安定器とから構成され、気泡の「網」を形成することにより、魚をわなにかけて、その後捕獲することができる。従って、本発明は、経済的にも生態系的にも魚を捕獲するのに使用されることにより、従来の網を排除し、捕獲される非対象種の数量を減少する。他の利点は捕獲物の品質を改善することである。本システムを漁業及び養殖業で使用することができる。 (もっと読む)
海底生物採取機
【課題】平坦な海底はもとより、岩礁域及び石が多く点在する海底においても、効率良く、また、アワビ等の貝類を傷付ける事なく、ウニを採取することができる海底生物採取機を提供する。
【解決手段】海底生物採取機は、吸引装置20と、この吸引装置20内に設けられ周面にブラシが植設されたドラム28と、このドラム28をその中心軸の回りに回転させるモータ284と、船上に設置され吸引装置20を海底で移動可能に支持する支持部材30と、この支持部材30を介して吸引装置20を海底で移動させる駆動部材と、船上に設置された吸引ポンプ102と、吸引装置20と吸引ポンプ102との間に連結された吸引ホース106と、を有する。
(もっと読む)
漁撈シミュレーション方法と、漁撈シミュレーションの遂行方法及び漁撈シミュレーター
【課題】漁撈シミュレーション方法と漁撈シミュレーションの遂行方法及び漁撈シミュレーターを提供する。
【解決手段】漁撈シミュレーション方法と、漁撈シミュレーションの遂行方法及び漁撈シミュレーターは、水中の物理化学的な環境と併せて多数の魚類個体よりなる魚群行動をシミュレーションすると同時に、様々な漁船及び漁具の挙動を3次元空間において正確に計算し、魚群の漁具に対する反応行動を連動させることにより漁撈過程に関する学習及び技術習得効果を増大させる。
(もっと読む)
棒受け漁用の集魚灯
【課題】 光源の長寿命化や高効率化を容易に図ることができ、かつ、エネルギーの利用効率も大幅に引き上げることができる棒受け漁用の集魚灯を提供する。
【解決手段】 集魚灯1は、ショートアークで小型のメタルハライドランプが使用される光源20と、光源20からの光を集光して反射させる反射ミラー21と、光源20を安定的に点灯させる安定器27と、光源20の瞬時の点灯及び瞬時の再点灯を行わせるスターター28とを有するランプユニット2を、一体として複数台、かつ、防水状態で備えるとともに、複数のランプユニット2中の光源20を同時に点灯及び消灯させる回路手段9を備えた。反射ミラー21の使用により光の利用効率がよくなった小型の光源20を用いて、小型軽量なランプユニット2を作り、これらを複数台用いて集魚灯1を形成しているので、この集魚灯1を棒受け漁用の漁船の支持棒に取り付けても、これに大きな撓みは生じない。
(もっと読む)
集魚方法および集魚システム
【課題】
光の照射を利用した集魚において集魚効率を高める。
【解決手段】
指向性を有する光を光源1から水面Wに照射して魚類を集群させる。集群した魚類によって形成された魚群Fよりも遠方に光の水中への入射深度が深くなる深入射域Bを形成する。深入射域Bを光源1方向へ移動させて魚群Fを光源1方向へ誘導する。
(もっと読む)
漁獲方法および照明装置
【課題】
光の照射に伴う漁獲対象物の忌避行動を利用して、漁具付近に集群した漁獲対象物の群を適正規模に削減する。
【解決手段】
水中に漁獲対象物を捕獲する漁具Nを設置し、水面または水中に光を照射して光に対して正の走性を有する漁獲対象物を漁具N付近に集群させ、漁具N付近に集群した漁獲対象物に漁獲対象物が忌避行動をとる周期の光の点滅を照射して漁獲対象物の群Fを分断し、分断された漁獲対象物の一部の群Faを漁具Nで捕獲する。
(もっと読む)
遡上魚の採捕方法、採捕装置及び採捕システム
【課題】 水域における遡上魚の採捕に適する採捕方法、採捕装置及び採捕システムを提供すること。
【解決手段】 遡上魚の採捕方法は、遡上魚が生息する水域の水面上に遡上魚が遡上可能の角度をなす傾斜板(7)を配置し、傾斜板上を流下する、遡上魚の遡上を誘う水流を生じさせ、傾斜板を遡上した遡上魚を採捕可能領域に落下させることを含む。採捕装置(1)は、使用時に遡上魚が生息する水域の水面上に設置可能、かつ、増水によって第1の方向に溢流が可能な水槽(3)と、水槽に水を導入して増水させるための水導入手段(5)と、第1の方向に溢流した水を流下させるための傾斜板(7)とを含めて構成してあり、傾斜板が、使用時に、流下した水によって遡上魚を遡上させ、かつ、遡上させた遡上魚を当該水槽内に落下可能に構成してある。
(もっと読む)
漁船団間の相互通信システム
【課題】複数の漁船からなる漁船団間の相互通信システムにおいて、自船と他船の位置情報を共有する。
【解決手段】衛星からの自船位置情報を受信するGPSアンテナと、衛星からの自船位置情報を処理するGPS受信装置と、GPS受信装置にて処理された自船位置情報を表示する表示装置と、GPS受信装置が受信した自船位置情報をプログラムにより信号処理する制御装置と、制御装置で信号処理された自船位置情報を送信する秘匿性を有する無線装置とをそれぞれの漁船に搭載し、前記制御装置に備えられた選択スイッチにより漁船毎の識別信号が選択され、選択スイッチにより選択された識別信号と呼出信号を前記無線装置によって送信し、他船に搭載された制御装置を制御し、他船の位置情報を秘匿性を維持した状態で前記無線装置によって送信させて入手し、GPS受信装置によって自船と他船の位置情報を処理して表示装置に表示する。
(もっと読む)
インターレス画像を用いた行動解析装置
【課題】養殖漁業を行う現場あるいは漁業関連の研究分野では仔魚、稚魚、プランクトンなどの微小生物の行動を計測したいとの要望がある。しかし、これまでの計測手法では、微小生物の急激な動きの変化に対応できず行動計測を行う事は難しかった。
【解決手段】本発明は、取得したインターレス画像のなかから特徴的な画像を異常行動として計測すること事を特徴とする。観測される通常行動と異常行動の出現数および時間の変化による出現数の変動を計測し異常行動出現データベース9に記録する。異常行動出現データベース9には通常行動の出現数9aと異常行動の出現数9bが記録される。この異常行動出現データベース9を用いることにより、異常行動の出現数、出現比率、出現数や出現比率の時間的変動を算出し、仔魚、稚魚、プランクトンなどの健康状態を判断する指標とする。
(もっと読む)
漁場予測システム
【課題】魚の多くいる漁獲位置を高い精度で予測することが可能な漁場予測システムの提供を目的とする。
【解決手段】漁場予測システムGは人工衛星4により観測された海表面の海水温度分布データを受信する海水温度分布受信手段11と、人工衛星4により観測された海表面の植物プランクトン濃度分布データを受信する植物プランクトン濃度分布受信手段12と、現実の漁獲位置のデータを含む漁獲情報データを収集する漁獲情報収集手段13と、それぞれ受信された海水温度分布データ、植物プランクトン濃度分布データ、及び収集された漁獲情報データに基づいて予測漁獲位置を算出する予測漁獲位置算出手段14と、算出された予測漁獲位置を外部に出力する出力手段5とを備えた構成にしてある。
(もっと読む)
1 - 20 / 28
[ Back to top ]