
Fターム[2B121FA04]の内容
Fターム[2B121FA04]に分類される特許
1 - 20 / 251
乗用管理機
作業車両
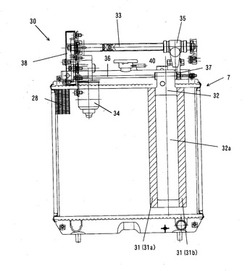
【課題】
ラジエータの防塵ネットの塵埃をタイミングよく除去できるようにする。
【解決手段】
走行車両(1)にラジエータ(7)を設け、ラジエータ(7)の防塵ネット(28)の表面に縦長のブラシ(31)を当接させながら電動モータ(34)でブラシ(31)を往復してスライド可能にした清掃装置(30)を設け、清掃装置(30)は、エンジンの始動から設定時間駆動したら停止することで、運転をするときには防塵ネット(28)の塵埃詰りを防止する。
(もっと読む)
獣類捕獲装置

【課題】 一度に複数頭の獣類を捕獲することができる獣類捕獲装置を提供する。
【解決手段】
獣類捕獲装置1は、複数の柵ユニット10〜10と、複数の扉ユニット11,11と、各ユニットを連結する連結コイルと、センサ12,12と、制御部と、を備える。各ユニットは横方向に並べて配設され、連結コイルによって連結されることで、捕獲空間を形成する。センサ12,12は扉ユニット11,11から獣類捕獲装置1内への獣類の進入及び退出を検知する。制御部は、センサ12,12による検知に基づいて、獣類捕獲装置1内の獣類の頭数を検知し、当該頭数に基づいて、扉ユニット11,11を閉鎖する。
(もっと読む)
薬剤散布装置
【課題】 播種機又は移植機に簡単かつ汎用的に取り付けることができるとともに、誤作動による薬剤の散布を防止することができるようにする。
【解決手段】 本発明の薬剤散布装置1は、播種機11の後側で圃場に薬剤を散布するものである。前記播種機11の鎮圧輪26の回転を検出する回転センサー7を備え、薬剤の散布停止中に、所定の開始待ち時間に亘って該回転センサー7が該回転を検出し続けると薬剤の散布を開始し、薬剤の散布中に、所定の停止待ち時間に亘って該回転センサー7が該回転を検出しないと薬剤の散布を停止するように構成されている。
(もっと読む)
犬、猫、害虫、又は鳥除け装置
【課題】 この種の犬、猫、害虫、又は鳥除け装置において、回転する棒材、杆体等の細い素材を、旋回して、鳥を威嚇する装置(旋回式犬、猫、害虫、又は鳥除け装置とする)は簡便であり、ネット(ネットでは、このネットと農作物との隙間より、鳥が侵入することが間々発生する)に対して有益性があることから、実用価値がある。しかし、本来の目的を達成するには、更なる改良が必要である。
【解決手段】 本発明は、支柱と、支柱の上端に設けた回転体と、回転体の放射方向に取付けた複数本の防除杆と、回転体と防除杆の回転を司る風受け部とで構成した犬、猫、害虫、又は鳥除け装置であって、防除杆が、水平状態において、0.5m〜2m程度以上の長さと、水平状態を確保するための素材で構成した犬、猫、害虫、又は鳥除け装置であり、防除杆の水平状態を、確保して、防除杆への負担を軽減しつつ、スムースな回転(旋回)が可能となる。
(もっと読む)
腹足類生物の捕集装置
【課題】腹足類生物の習性を外部から制御することで腹足類生物の動きに捕らわれず、腹足類生物を探し回るという手作業や重労働からの負担を抑えた高効率な腹足類生物の捕集装置を提供する。
【解決手段】腹足類生物の捕集装置は、媒体物質を介して配設される一対の対向する電極と、前記電極間に直流電圧を出力する直流電源と、前記直流電源から出力される直流電圧の電圧値を制御して電極間に印加する電圧制御部とを備え、前記電極のうち低位側の電極近傍に前記媒体物質中の腹足類生物を誘引させる。
(もっと読む)
農地管理方法、及び農地管理システム
【課題】農地における除草作業を効率よく確実に行えるようにする。
【解決手段】農機300は、位置標定装置411によって標定される現在位置と記憶しているコースとに基づき操舵機構又は動力機構を制御して自律走行しつつ農作業を行う。農機300は、自律走行に際し植え付け機構により農作物5の植え付けを行うとともに植え付けを行った位置を植え付け位置として記憶する。農機300は、除草のための自律走行に際し記憶している植え付け位置以外の位置に存在する植物を除草機構により除草する。農機300は、自律走行中に記憶している植え付け位置以外の位置に植物が存在することを検知すると除草機構により当該植物を除草する。また検知した植物が雑草6であるか否かを画像認識機構4191により判断し、検知した植物が雑草6であると判断した場合にのみ当該植物を除草する。
(もっと読む)
野生動物捕獲装置
【課題】従来の捕獲装置は、電力源として市販の大出力のバッテリーを用いていたので、捕獲時期の1シーズン中に少なくとも1回は充電(交換)しなければならない点、充電のためにバッテリーだけを持ち運ぶのが困難である点、を解消する。
【解決手段】野生動物捕獲装置1は、野生動物を捕獲する捕獲設備2と、この捕獲設備2に設けた捕獲機構3とを備え、捕獲機構3を駆動させるためのエアボンベ4と、このエアボンベ4及び全体を作動させるための制御部6に電力を供給する乾電池又は充電式の乾電池を電力源とする低電力装置7と、を備える。
(もっと読む)
薬液散布作業車両
【課題】自動的に上昇又は下降させる制御を安全に行える薬剤散布作業車両を提供すること。
【解決手段】薬液タンク18からの薬液を圃場に散布するセンターブーム43と左右のサイドブーム44と操舵角センサ7の旋回角度が所定値になると自動的に旋回外側のブーム44の上昇を行い、次いで旋回角度がさらに所定値になる自動的に旋回外側のブーム44の下降を行う制御とブーム44の上昇時間と下降時間を区別して設定し、記憶しておく制御装置100を備えた車両であり、ブーム44の上昇時間に応じた上昇量に合わせたブーム44の下降時間を設定できるので、操縦者の車両操縦能力に応じた薬液散布のタイミングを決めることができ、旋回終了してない間にブーム44が下降完了したものとして薬液散布を始めること、ブーム44が下降完了してない間に車両が直進する領域を作る等の不具合がなくなる。
(もっと読む)
ペット用餌箱
【課題】ペット用餌の臭い拡散に拠るゴキブリの誘引と侵入を防止する。
【解決手段】餌箱蓋2−3を開く情報にはペットに拠るスイッチ操作またはペットの体重またはRFIDタグまたは鳴き声認識を用いる。ペットの食事信号が一定時間欠如した後に餌外箱2−1の蓋を閉じる。ペットの食事信号としては、食事に拠る音または振動または餌外箱2−1への加重またはペットの体重を用いる。RFIDタグを用いるシステムではRFID信号の欠如も食事の完了と見なし餌箱蓋2−3の閉の信号となる。餌箱蓋2−3の開閉の動力源にはペットの体重または電池または発条バネを用いる。
(もっと読む)
鳥獣等の駆除装置
【課題】鳥獣等の警戒心を強く刺激する鳥獣等の駆除装置を提供する。
【解決手段】支持手段(2)の翼片部(8)に形成した斜め上向きの取付面(8a)に駆除ユニット(3)の太陽電池(10)を斜め上向きに臨ませるように構成することにより、太陽電池(10)が太陽光の照射を受けやすくなるように構成している。駆除装置(1)は、吊下索条(4)を介して宙吊り状態に吊持され、所定時間帯に駆除ユニット(3)から駆除信号(S)を発生し、風力を受けることにより吊下索条(4)を介して自由に揺動かつ回転し、鳥獣等の警戒心を刺激する。更に、翼片部(8)は傾斜角度θで傾斜する偏向羽根を形成し、風力を受けることにより積極的に回転力を発生し、駆除ユニット(3)を回転させることにより、駆除信号(S)による鳥獣等の駆除効果を高める。
(もっと読む)
除虫装置
【課題】発泡させた界面活性剤の泡を用いて害虫を駆除する除虫装置であって、比較的簡易な構造を有し且つ発泡させた界面活性剤の泡を効率よく消泡することが可能な除虫装置を提供する。
【解決手段】除虫装置は、マイクロポンプ11と発泡体4とを有する発泡部10と、流下部とを備えている。マイクロポンプ11は、界面活性剤を含む溶液を発泡体4に供給する。発泡体4は、マイクロポンプ11から供給される溶液に泡を発生させる。流下部は、発泡部10よりも下方に配置され、泡を含む溶液を上方から下方に向かって流下させる。
(もっと読む)
トラクター直装式ブームスプレーヤ
【課題】 ブームが実際に傾斜した場合にそのブームを速やかに、かつ適正に回動制御して迅速な傾斜角度の補正ができるトラクター直装式ブームスプレーヤを提供する。
【解決手段】 ブーム4が基部フレーム3に対してその重心近傍で回動自在に支持されているとともに、ブーム4を正逆方向に回動させるブーム回動手段8と、前輪車軸24の車体21に対する相対的な傾斜角度を計測する前輪傾斜角度計測手段9と、走行面の凹凸により後輪が傾斜する前に、前輪車軸の相対的な傾斜角度の方向と反対方向にブーム4を回動させるための準備をブーム回動手段8に実行させるブーム回動準備制御手段11と、ブーム4の基部フレーム3に対する相対的な傾斜角度を計測するブーム傾斜角度計測手段10と、ブーム4の相対的な傾斜角度が所定の範囲を超えた場合、回動準備中のブーム回動手段8を駆動してブーム4を制御するブーム回動制御手段12とを有する。
(もっと読む)
虫の撃退装置、および虫の撃退プログラム
【課題】虫を撃退する虫の撃退装置および虫の撃退プログラムにおいて、使用者が移動時に撃退装置の電源を切るなどの操作をしなくてもよいようにする。
【解決手段】端末装置においては、虫を撃退するための作動を行なう撃退部(スピーカ、LEDライト、香料カートリッジ)を備えている。そして端末装置は、端末装置の周囲環境の情報を取得し(S110)、取得された周囲環境に応じて撃退部が利用可能か否かを判断する(S120)。このとき、複数の撃退部毎に利用可能か否かを判断する。そして、利用可能と判断された撃退部を作動可能とする(S130)。このような端末装置によれば、周囲環境に応じて撃退部を作動可能とするか否かを設定するので、使用者が移動時に周囲環境を考慮して端末装置の電源を切るなどの操作をしなくてもよい。よって、使用者が端末装置を都度操作する煩わしさを防止することができる。
(もっと読む)
鳥獣追い払い装置及び方法
【課題】威嚇動作による撃退効果が低下せずに長期にわたって維持される鳥獣追い払い装置及び方法を提供する。
【解決手段】鳥獣追い払い装置は、光センサと、撃退すべき鳥獣の接近を表す信号を出力する近接センサと、少なくとも1つの閃光発光源を備えており閃光を発することができる閃光発生手段と、光センサ、近接センサ及び閃光発生手段に電気的に接続された制御手段とを備え手いる。制御手段は、光センサからの信号に基づいて周囲環境があらかじめ定めた第1の暗さ状態より暗く、かつ、近接センサからの信号に基づいて撃退すべき鳥獣が接近した場合にのみ、閃光発生手段に閃光を発生させるように構成されている。
(もっと読む)
作業車両
【課題】複数の作業機と通信を行う際の誤動作を防止した作業車両を提供する。
【解決手段】トラクタ10は、複数の作業機を接続可能である。また、トラクタ10は、通信制御ユニット36を備えている。通信制御ユニット36は、前記作業機と通信を行うことにより、当該作業機と連動した動作をトラクタ10に行わせることが可能である。そして、通信制御ユニット36は、各作業機とトラクタ10との前記連動の有無を設定可能であるとともに、当該設定を上書き可能である。
(もっと読む)
虫忌避回路および電子機器
【課題】 音を用いた防虫の効果を向上させ、害虫から電子機器を保護すること。
【解決手段】 一実施形態における虫忌避回路は、入力される信号の周波数で音を発する発音部と、虫が嫌う音の周波数帯域内で定められた異なる周波数の信号をそれぞれ生成する複数の発振部と、これら各発振部にて生成される信号から順次1つの信号を選択して前記発音部に出力する選択部と、を備えている。
(もっと読む)
薬液散布作業車両
【課題】旋回時又は旋回終了時に旋回外側のサイドブームを自動的に上昇又は下降させる制御を安全性を考慮して可能にした薬剤散布作業車両を提供すること。
【解決手段】GPS受信機81から得られる車速又は車輪12又は13の回転数から得られる車速により適切な薬液散布量となるように薬液タンク18からの薬液流量を流量制御モータ10により流量調節弁73の開度を調整する。このとき車輪12及び/又は13の操舵角の検知により自動的に旋回外側のサイドブーム44の上昇を行い、また前記車速が所定値以上になると旋回外側のサイドブーム44の自動上昇を行わない制御を行うことで、高速走行時にサイドブーム44の破損等の不具合を防止できる。
(もっと読む)
薬剤散布車の散布制御装置
【課題】左右のブームをそれぞれ昇降可能に備えて薬剤散布する際の機体旋回後の散布再開に伴う作業者の負荷軽減を可能とする薬剤散布車の散布制御装置を提供する。
【解決手段】薬剤散布車の散布制御装置は、直線散布走行から旋回走行により隣接域に移行して逆方向の直線散布走行を開始する薬剤散布車に薬剤散布用の左右のブーム(9b,9b)を昇降可能に備え、これら左右のブーム(9b,9b)を低位散布のための作業位置と高位待避のための非作業位置にそれぞれ切替え可能に構成され、直線散布走行中に所定の旋回判定舵角以上となる1回目の舵角検出によってその旋回外側のブーム(9b)を非作業位置に切替え制御し、これに続く同側の旋回判定舵角以上となる2回目の舵角検出によって旋回終了と判定し、この旋回終了の判定によって上記ブーム(9b)を作業位置に切替える制御処理を設けたものである。
(もっと読む)
虫の画像処理装置、画像処理方法、画像処理プログラム及びコンピュータで読み取り可能な記憶媒体
【課題】簡便に且つ迅速に虫の計数や判別が可能なシステムを提供する。
【解決手段】虫を含む可能性のある対象画像を取得するための画像取得手段1と、画像取得手段1で取得された対象画像から、虫に該当する画像を抽出する画像抽出手段11と、画像抽出手段で抽出された抽出領域から、画像処理によって虫に関する情報を解析する情報解析手段12と、情報解析手段12で解析された虫に関する情報に基づいて、虫かどうかの判別を行う判別手段13と、判別手段13で虫と判別された抽出領域の数を計数する計数手段15と、計数手段15で計数された結果を虫の数として出力するための出力手段とを備える。
(もっと読む)
1 - 20 / 251
[ Back to top ]