
Fターム[2B304MA06]の内容
Fターム[2B304MA06]の下位に属するFターム
前後傾斜(ピッチング制御) (32)
左右傾斜(ローリング制御) (149)
水平面回動 (5)
Fターム[2B304MA06]に分類される特許
1 - 12 / 12
作業機のアンロード装置
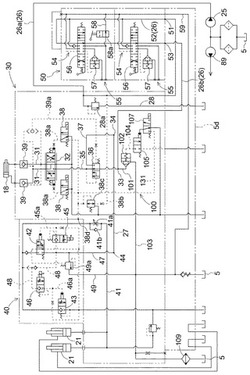
【課題】油圧アクチュエータの停止時に油圧ポンプからの圧油を切換弁によってアンロード油路に流出させる作業機のアンロード装置を安価に得る。
【解決手段】切換弁102の背圧室から排油路104に圧油排出させる開き状態と圧油排出を停止する閉じ状態とに切り換え自在な開閉弁105、開閉弁105をパイロット油圧によって切り換え操作する制御弁107を備えてある。アクチュエータ駆動回路30,40が油圧アクチュエータ18,21を駆動するべく操作されると、制御弁107が開閉弁105を閉じ状態に切り換え操作し、アクチュエータ駆動回路30,40が油圧アクチュエータ18,21を停止するべく操作されると、制御弁107が開閉弁105を開き状態に切り換え操作する。
(もっと読む)
作業車両

【課題】走行停止状態での待機時間を不要としつつ、後進走行中に従来より短時間に作業機を上昇できる作業車両を提供すること。
【解決手段】機体2の後部に苗移植装置7を装着するためのリンク機構8と、リンク機構を昇降させる昇降装置30と、機体2に設けられたエンジン6と、エンジン6の動力を変速して出力する変速装置5と、前進走行域、停止域、及び後進走行域の何れかの位置に切り替えることにより、変速装置の出力を変化させて走行速度を操作する走行操作レバー10と、走行操作レバー10が少なくとも後進走行域にある場合に苗移植装置7の上昇速度をエンジン回転数に基づいて制御する第1の制御を行う制御部200とを備え、第1の制御は、走行操作レバー10が、後進走行域の内、走行速度を最高に設定する最高速位置にあるときのエンジン回転数よりも、最高速位置より手前の位置にあるときのエンジン回転数の方を高くする制御である、作業車両。
(もっと読む)
作業車両
【課題】オペレータが作業中に昇降制御や姿勢制御が確実に行われていることを確認できるようにすると共に、昇降制御や姿勢制御における感度調節のための参考情報を容易に得られるようにする。
【解決手段】昇降制御、或いは姿勢制御を行うアクチュエータ24,32に対して伸張指令が出されているか、縮小指令が出されているか、又は制御不能な状態にあるか否か等を、座席に座ったオペレータが目視可能なセンターピラー9bに設ける表示ユニット57を介してオペレータに表示する。
(もっと読む)
トラクタ
【課題】トラクタに作業機を連結する作業、或いは作業機を清掃する作業等において、作業者が地上に降りた状態であっても迅速にエンジンを停止させたり、或いはPTOクラッチを切り操作することができるようにする。
【解決手段】制御装置は、指令スイッチの何れか一つのスイッチが単独で入りとなった際には、ヒッチ機構を昇降又は傾斜させ、また、二つの指令スイッチが共に入りとなった際には、エンジンを停止させ、或いはPTOクラッチを切る。
(もっと読む)
農作業機
【課題】走行機体に動力を供給する動力源の駆動及び走行機体に連結してある作業機の作動を制御する複数の制御方法を適宜選択し、操作性及び利便性を向上させることができる農作業機を提供する。
【解決手段】耕耘機制御装置は前記作業モード切替スイッチが押下されたことを示す信号が入力され(ステップS1)該スイッチにより選択された作業モードが通常モードであるときは(ステップS2)所定のランプを点灯させて通常モードでの制御を行う(ステップS3、S4、S5)。選択された作業モードが枕地モードであるときは(ステップS6)所定のランプを点灯させて枕地モードでの制御を行う(ステップS7、S8、S9)。選択された作業モードが走行モードであるときは(ステップS6)所定のランプを消灯させて走行モードでの制御を行う(ステップS10、S11、S12)。
(もっと読む)
作業車両
【課題】作業機の昇降や傾斜角度の調節、さらにはエンジンの駆動や停止を車両から離れた位置からでも行える、操作性および安全性を向上させた作業車両を提供する。
【解決手段】エンジン3を備えるとともに、機体1に装着した作業機を昇降させる昇降装置103と、作業機の傾斜角度を調節する傾斜装置106とを機体1に備え、昇降装置103および傾斜装置106を遠隔操作可能にする、機体1に着脱自在に設けた操作部114と、機体1に設置した操作部114からの情報を検出する検出部115とからなるリモコン装置113を備える。
(もっと読む)
耕耘制御装置
【課題】車輌本体に対して昇降可能に連結された耕耘機の耕深深さを制御するための耕耘制御装置であって、耕耘作業開始時において、既耕耘地面の表面に凹凸が残ったり、前記耕耘機のハンチング現象が発生することを有効に防止し得る構造簡単な耕耘制御装置を提供する。
【解決手段】耕耘上面カバー435及び耕耘リヤカバー437を含む耕耘カバーがカバー回動用アクチュエータ700によって耕耘爪軸433の軸線回りに前後へ回動可能とされた耕耘機400の耕深位置hDを設定耕深位置hRに追従させる自動耕深制御を行うように構成された耕深制御装置は、前記耕耘機400を非耕耘状態位置hLから下降させて自動耕深制御での耕耘作業を開始させる際に、前記耕耘機400の接地から一定区間又は一定期間においては、前記自動耕深制御を停止すると共に、前記耕耘リヤカバー437の接地長さが延長されるように前記カバー回動用アクチュエータ700を作動させる。
(もっと読む)
作業車両のアーム型作業機
【課題】農用作業車両の複数箇所にロボットアームを装着可能に構成し、ロボットアームにより複数の作業を円滑に実行する。
【解決手段】縦軸(22c)回り及び横軸(22d)回りに回動自在な第一アーム(23)と、この第一アーム(23)の先端部に屈折自在に連結している第二アーム(24)とでロボットアームを構成する。ベース部材(22)に前記第一アーム(23)を前記縦軸(22c)回りに回動自在に支持し、トラクタ(1)の機体前側部と左右側部にベース部材(22)の取付部(21a,21b)を設け、第二アーム(24)の先端部に複数の補助作業装置(26,…)を取り付け可能に構成する。
(もっと読む)
走行車両
【課題】ハンドル2の押し下げ荷重が比較的軽い歩行型の走行車両を提供すること。
【解決手段】エンジン5からの動力を左右一対の走行車輪7,7にそれぞれ伝達する伝動機構を収納した左右一対の伝動ケース9,9と該伝動ケース9,9を連結機構9A,9B;9A,9Bを介して上下方向に回動させて左右の走行車輪7,7をそれぞれ上下動させる左右一対のアクチュエータ15,15と左右の走行車輪7,7への伝動をそれぞれ断つ左右一対のサイドクラッチとを設け、旋回外側の走行車輪7の駆動反力で旋回外側の伝動ケース9が更に下降するように旋回外側のアクチュエータ15と伝動ケース9との連結機構9A,9Bに長穴15aと該長穴15aに係止されるシャフト9Bのピン9Baからなる遊びを持たせた。
(もっと読む)
コンバインにおける前処理部の昇降制御装置
【課題】コンバインを運転操縦するオペレータの好みや作業形態に応じて、前処理部の昇降制御速度を容易に切替ることができる昇降制御装置を提供する。
【解決手段】穀稈を刈取る前処理部16を油圧シリンダ33を介して昇降させる昇降操作具17を備えたコンバインにおいて、前記昇降操作具17の操作位置に応じて前処理部16の昇降速度を変更する可変速昇降制御と、前処理部16を一定の高速で昇降作動させる一定高速昇降制御とに切り替え可能に構成すると共に、当該昇降操作具17の把持部に両昇降制御を切り替える切替手段43を設けた。
(もっと読む)
農業用トラクタのコントローラ
【課題】不揮発性メモリの内容を変更しようとしてもできるだけ安全性を確保しようとする。
【解決手段】農業用トラクタ(T)各部の作動を司るコントローラ(10)には、制御定数や基準値を書き込む不揮発メモリ(70、71)を設け、該コントローラ(10)にこれら制御定数や基準値を書換え可能な外部接続書換手段(73)を接続し、これら制御定数や基準値には安全に関する項目であるか否かを認識するデータを付し、上記外部接続書換手段(73)によって制御定数又は基準値を書換えする際に安全に関する項目であると判定されたときには、予め登録処理したパスワードの入力を条件に制御定数又は基準値を書換え可能に構成した。
(もっと読む)
作業機の傾斜制御装置
【課題】 角度センサ27からの検出情報に基づいて姿勢制御用の駆動機構を作動制御して作業装置を所定の傾斜姿勢に安定維持させるよう構成した作業機の傾斜制御装置において、安価に入手できる角度センサを用いた簡単な角度検出手段を用いて安定した傾斜制御を比較的精度よく行えるようにする。
【解決手段】 角度センサ27からの検出情報の低周波成分に基づいて姿勢制御用の駆動機構を起動させ、角度センサ27からの検出情報の高周波成分に基づいて駆動機構の作動を停止させる。
(もっと読む)
1 - 12 / 12
[ Back to top ]