
Fターム[2B304MA08]の内容
Fターム[2B304MA08]に分類される特許
1 - 20 / 149
雪下野菜の収穫方法及び収穫装置
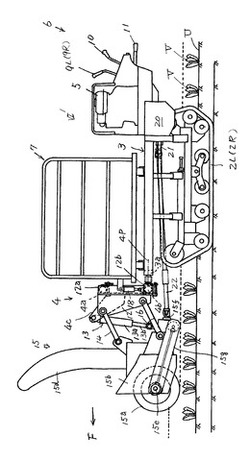
【課題】従来雪下の野菜収穫のための除雪作業手段は人手によるほかなかったが、除雪作業を機械化することで軽労化をはかる。
【解決手段】走行車体1に除雪装置15を装着し該走行車体1を圃場に形成する畝に沿って走行させながらこの畝面U及び該畝面Uに生育する野菜V,V…に堆積する積雪を上記除雪装置1によって生育した野菜V,V…を残して除去することによって、主として手作業に頼る収穫作業の際の除雪作業を無くしあるいは省力化し、該収穫作業の軽労化及び能率向上を図ることができる。
(もっと読む)
作業機の油圧駆動装置

【課題】アンロード回路の調節による複数の油圧アクチュエータの駆動調節を適切に行わせることができる作業機の油圧駆動装置を提供する。
【解決手段】複数の油圧アクチュエータの操作弁機構30,40に圧油供給する圧油供給路26から圧油を排出するアンロード回路103、アンロード回路103を開度調節する操作弁107を設けてある。操作量検出手段151,152による検出情報、ポンプ回転検出手段153による検出情報に基いて操作弁107を制御するアンロード制御手段150を設け、操作弁機構30,40の操作量に応じてアンロード回路103を開度調節するように、油圧ポンプが低速回転であるとアンロード回路103を小開度に調節するように、油圧ポンプが高速回転であるとアンロード回路103を大開度に調節するように構成してある。
(もっと読む)
歩行型草刈り機
【課題】 地面の状況にかかわらず草の刈り過ぎや刈り残しを無くすことができる歩行型草刈機の提供。
【解決手段】 クローラ11による走行駆動部1の前側に、昇降機構5により昇降可能な刈取部3を備えた歩行型草刈り機において、刈取部3が走行駆動部1に対しローリング軸受け機構6を介してセンターローリング可能に連結されている。
(もっと読む)
歩行型草刈り機
【課題】 刈取部を昇降する昇降機構の操作をハンドルを握った状態のままで操作することができる遠隔操作機構を備えた歩行型草刈機の提供。
【解決手段】 駆動輪を備えた走行駆動部の前側に、昇降機構により昇降可能な刈取部を備え、走行駆動部の後側にハンドル部を備えた歩行型草刈り機において、
前記昇降機構を操作する遠隔操作機構がハンドル部に位置する操作者の近くに備えられている構成とした。
(もっと読む)
歩行型草刈り機
【課題】 果樹園の低い枝の下や、壁際など、車体が入れない箇所でも草刈りを可能とする歩行型草刈機の提供。
【解決手段】 クローラ11による走行駆動部1の前側に、昇降機構5により昇降可能な刈取部3を備えた歩行型草刈り機において、走行駆動部1の前側には先端側に左右一対のキャスター21、21を備えた支持フレーム2が走行駆動部1に対し横スライド可能な横スライド機構4を介して連結され、刈取部3は支持フレーム2に対し昇降機構5を介して昇降自在に吊下されている構成とした。
(もっと読む)
水平制御装置
【課題】オペレータが移動させたい方向とは反対方向に制御対象部材の傾きが変更されるという不都合を確実に防止する。
【解決手段】水平制御装置において、制御装置は、傾き設定部材が操作されると、当該傾き設定部材の操作方向を把握すると共に、傾きセンサによって検出された前記傾き設定部材の操作前の状態における制御対象部材の実際の傾きと前記傾き設定部材の操作後の状態に応じて設定される目標傾きを基準とした縮小幅の不感帯との相対位置関係に基づいてアクチュエータによって前記制御対象部材が傾けられるべき傾斜方向を把握して、前記操作方向及び前記傾斜方向が同じか否かを判定し、前記操作方向及び前記傾斜方向が同じ場合には前記傾き設定部材の操作時に行う不感帯幅の縮小幅への変更を許容し、前記操作方向及び前記傾斜方向が異なる場合には前記傾き設定部材の操作時に行うべき不感帯幅の縮小幅への変更を禁止して不感帯幅を標準幅に維持する。
(もっと読む)
乗用移植機
【課題】植付作業機を傾斜した地面に下ろす際に、植付作業機や強制傾斜機構の破損を防止する。
【解決手段】走行機体1の後部に昇降自在かつ左右傾斜自在に連結される植付作業機3と、植付作業機3の走行機体1に対する左右傾斜姿勢を水平制御モータ15の動力で強制的に変化させる強制傾斜機構19と、植付作業機3が水平姿勢を維持するように水平制御モータ15を駆動制御する水平制御手段と、スタンド姿勢と非スタンド姿勢とに変姿可能な状態で植付作業機3に設けられ、植付作業機3を地面に下ろす際にスタンド姿勢とされるスタンド装置23と、を備える乗用移植機であって、スタンド装置23の姿勢を検出するスタンド検出スイッチ29と、スタンド装置23がスタンド姿勢のとき、植付作業機3が走行機体1に対して平行となるように水平制御モータ15を駆動制御する平行制御手段と、を備える。
(もっと読む)
作業機
【課題】 本発明の課題は、整地装置の干渉を防止することである。
【解決手段】 走行車体(1)の後側に昇降リンク装置(3)を介して縦リンクを昇降可能に設け、縦リンクに上下動機構を介して整地装置(8)を収納位置へ上動可能に支持させ、縦リンクに着脱される着脱ヒッチを介して作業部(4)を装着し、作業部装着状態で着脱ヒッチが外れないようロックするロック装置を設け、作業部(4)と整地装置(8)を共に左右ローリングさせるローリング軸を設け、作業部(4)の上昇時には上下動機構の作動により整地装置(8)を収納位置へ上動させる構成とした作業機とした。
また、機体の旋回時には上下動機構の作動により整地装置(8)を収納位置へ上動させる構成とした作業機とした。
(もっと読む)
苗移植機
【課題】旋回操作連動で植付部を昇降制御する場合に、下降時の植付部の保護と圃場面の検出精度を損なうことなく、速やかに植付を再開できる苗移植機を提供する。
【解決手段】苗移植機は、圃場走行用の走行部(2,3)と、苗移植の作業高さを検出する圃場面センサ(6s)を備えて昇降リンク(5)により昇降可能な植付部(6)と、この植付部(6)を左右水平に角度調節するローリング機構(7)と、の旋回開始で植付部(6)を上昇保持し、旋回終了で作業高さに戻す旋回連動昇降機構とを設けて構成され、上記植付部(6)の高さ位置を検出する位置検知装置(5s)を設け、この位置検知装置(5s)により、旋回開始時の植付部(6)の作業高さを記憶するとともに、旋回終了時の植付部(6)の下降の際に、記憶による作業高さ位置から上方に所定距離の高さ位置を境にその上下で下降速度を切替え制御可能に上記旋回連動昇降機構を構成したものである。
(もっと読む)
トラクター直装式ブームスプレーヤ
【課題】 ブームが実際に傾斜した場合にそのブームを速やかに、かつ適正に回動制御して迅速な傾斜角度の補正ができるトラクター直装式ブームスプレーヤを提供する。
【解決手段】 ブーム4が基部フレーム3に対してその重心近傍で回動自在に支持されているとともに、ブーム4を正逆方向に回動させるブーム回動手段8と、前輪車軸24の車体21に対する相対的な傾斜角度を計測する前輪傾斜角度計測手段9と、走行面の凹凸により後輪が傾斜する前に、前輪車軸の相対的な傾斜角度の方向と反対方向にブーム4を回動させるための準備をブーム回動手段8に実行させるブーム回動準備制御手段11と、ブーム4の基部フレーム3に対する相対的な傾斜角度を計測するブーム傾斜角度計測手段10と、ブーム4の相対的な傾斜角度が所定の範囲を超えた場合、回動準備中のブーム回動手段8を駆動してブーム4を制御するブーム回動制御手段12とを有する。
(もっと読む)
田植機
【課題】苗継ぎ作業時に、エンジンの回転数をアイドル回転数よりも低下させた場合でも、植付部を設定角度に維持することができる田植機を提供する。
【解決手段】エンジン14が搭載された走行部10の後方に植付部40を左右傾斜可能に装着した田植機1において、制御装置100は、苗継ぎ位置検出スイッチ23aのON信号を検出すると、エンジン14の回転数がアイドル回転数より低い設定回転数となるように第一アクチュエータ71を制御して、かつ、角速度センサ61の検出値Bを静止状態の検出値Bで置き換えて前記第二アクチュエータ72を制御する。
(もっと読む)
田植機
【課題】植付部の昇降制御の追従性を向上させた田植機を提供する。
【解決手段】田植機は、植付部と、フロートセンサと、制御部と、を備えている。植付部は、地面に接触可能なフロートを備える。フロートセンサは、フロートの揺動角を検出する。制御部は、フロートセンサの出力値の微分値を制御量としたPID制御(ステップS103)により、植付部を昇降制御する。また制御部は、フロートセンサが検出したフロートの位置と、前記フロートの位置の目標値と、の差をフロートセンサの検出値に基づいて修正する(ステップS104)。
(もっと読む)
作業車両
【課題】作業機の昇降制御を安定させた作業車両を提供する。
【解決手段】田植機は、植付部と、制御部と、を備える。制御部は、植付部の加速度(具体的にはフロート角加速度)を取得する。そして制御部は、前記加速度に二階微分ゲインKd2を乗じたものに基づいて、植付部の昇降制御を行う。このように植付部の加速度に基づいて昇降制御を行うことにより、植付部の上下速度の変動が大きい場合の振動的な応答を抑制できる。また、前記加速度は、圃場表面からの反力によって生じるため、当該加速度に基づいて制御を行うことにより、圃場の硬さに応じた制御動作を実現することができる。
(もっと読む)
苗移植機
【課題】
後輪ローリング機構をシリンダで制御して、植付作業時や旋回作業時に機体の走行姿勢が作業に適した形態となる姿勢制御装置を設けた苗移植機を提供する。
【解決手段】
車体4の後部に中央回動軸42を中心に左右方向に回動するローリング機枠41を設け、ローリング機枠41の両端部に後輪3,3に回転駆動力を供給する後輪伝動ケース8,8を設け、ローリング機枠41を回動させる回動アクチュエータ9を設け、ハンドル1の操舵角度を検出する操舵角度検出部材7を設け、操舵角度検出部材7の検出した操舵角度から旋回内側を判別して回動アクチュエータ9を伸張または収縮させて車体4の旋回内側が低位となる側にローリング機枠41を回動させて傾斜姿勢にする構成とした。
(もっと読む)
トラクタ作業機の制御装置
【課題】本発明は、別の変更スイッチ等を設けることなく自動傾斜維持モードへの設定変更を容易に行えるようにする。
【解決手段】トラクタの車体1後部に作業機2をローリング可能に装着し、車体1に設けた傾斜センサ3の車体傾斜角検出に基づいてローリングシリンダ25を制御し、該ローリングシリンダ25のピストンロッドにより作業機2を水平に維持するトラクタ作業機の制御装置において、水平制御切換スイッチ33で作業機2を水平に維持する自動水平モードに設定した後に、作業機2の左右傾斜を調整する手動傾き調整スイッチ7,8の手動による傾き変更で水平に対する作業機2の傾斜角度を任意角度に設定可能にすると共に、この設定した傾斜角度を傾斜設定基準角度Aとして自動傾斜維持モードに移行して自動制御するようにしたことを特徴とするトラクタ作業機の制御装置の構成とする。
(もっと読む)
作業車両
【課題】走行機体の左右傾斜に拘わらず作業機を圃場面に対して予め定められた左右傾斜姿勢で保持させる左右傾斜制御を行う作業車両であって、低コストで、精度の高い左右傾斜制御を実行することが可能な作業車両を提供する。
【解決手段】前輪1側のフロントアクスルケース23の左右傾斜によって走行機体3が左右傾斜することを抑制するために、走行機体3をフロントアクスルケース23に左右傾斜可能に支持し、フロントアクスルケース23の左右傾斜角を検出する前輪側傾斜角検出手段と、走行機体3の走行速度を検出する車速検出手段とを設け、制御部は、前輪側傾斜角検出手段によって事前に検出されたフロントアクスルケース23の左右傾斜角と、車速検出手段からの検出結果とによって、走行機体3のその後の左右傾斜角を予測し、予測結果及び傾斜角検出手段36の検出結果に基づいて左右傾斜制御を実行する。
(もっと読む)
作業車両
【課題】機体後部に支持した作業機のローリング角度調節について、最小限の操作スイッチ構成と簡易な調節操作を確保した上で、傾斜センサによる一定傾斜の作業機による安定的な作業走行を可能とする作業車両を提供する。
【解決手段】作業車両は、ヒッチ(10)を介して支持した作業機(18)のローリング角度について、機体に備えた傾斜センサ(14)によって水平状態に維持する自動水平制御の適用の当否を水平切換スイッチ(43)の操作により切替え、自動水平制御の非適用時は、自動復帰構成の手動傾斜スイッチ(42a,42b)の左右の傾斜操作に応じてローリング角度を調節する制御部(35)を備えて構成され、上記制御部(35)は、自動水平制御の適用時に限り、所定時間を超える手動傾斜スイッチ(42a,42b)の継続操作に応じてローリング角度を調節するものである。
(もっと読む)
作業車両
【課題】対地作業機を牽引する作業車両において、傾き一定制御の実行中に走行機体を旋回させると、遠心力のせいで対地作業機が誤制御されるという問題を解消する。
【解決手段】本願発明の作業車両1は、走行機体2の後部にリンク機構を介して装着された対地作業機24と、該対地作業機24を前記走行機体2に対して左右に傾動させる傾斜制御アクチュエータ32と、前記走行機体2に設けられた傾斜検出手段81及び角速度検出手段82とを備える。前記両検出手段81,82の検出結果に基づく前記傾斜制御アクチュエータ32の駆動によって前記対地作業機24の傾き一定制御を実行するように構成する。前記傾き一定制御の実行中に前記走行機体2を旋回させた場合は、前記両検出手段81,82の検出結果に拘らず、前記対地作業機24が前記走行機体2に対して予め規定された設定角度となるように前記傾斜制御アクチュエータ32を駆動させる。
(もっと読む)
苗移植機
【課題】
走行車体が左右方向に傾斜すると、苗植装置が圃場面に対して略左右水平姿勢となるようにローリング駆動させ、苗の植付姿勢を安定させる苗移植機を提供する。
【解決手段】
圃場を走行する走行車体2の後部に苗を積載する苗載せ台4と、苗載せ台4の下部に苗載せ台4から苗を取って圃場に植える植付装置5からなる苗植装置6を設け、苗植装置6の傾斜量を検出する傾斜検知部材53を設け、傾斜検知部材53の検知に合わせて苗植装置6を左右方向に回動させるローリング機構Rを設けた苗移植機において、走行車体2に圃場の凹凸に対応して上下回動するローリング機構R2を設け、走行ローリング機構R2に所定量以上の回動を検知する走行ローリング検知部材49L,49Rを設け、走行ローリング検知部材49L,49Rが所定量以上の回動を検知したとき、ローリング機構Rの作動速度を減速させる構成とする。
(もっと読む)
圃場作業機、及び該圃場作業機をローダに取り付けて成る農業機械
【課題】ローダのリフトアームの先端に圃場作業機を取り付けて、圃場の環境や作業内容に柔軟に対応し、安定且つ安全に作業を行わせることのできる圃場作業機を実現する。
【解決手段】圃場作業機3の主フレーム38に作業具35〜37が取り付けられ、連結用主部材66の前端部は、主フレーム38に対してピッチング及びローリング可能に取付けられており、連結用主部材66の後端部に取り付けられた後部フレーム75に固定された取付支持板81のフック係合用ピン82に、ローダ2のリフトアーム10の先端に取り付けられたスナップヒッチ18のフックが係合され、取付支持板81の連結軸挿通孔とスナップヒッチ18の連結軸挿通孔とに連結用のボルト83が挿通されて、取付支持部材80がスナップヒッチ18に取り付けられる。
(もっと読む)
1 - 20 / 149
[ Back to top ]