
Fターム[2B304PA02]の内容
Fターム[2B304PA02]の下位に属するFターム
丸ハンドル (41)
Fターム[2B304PA02]に分類される特許
1 - 20 / 37
作業機
雪下野菜の収穫方法及び収穫装置
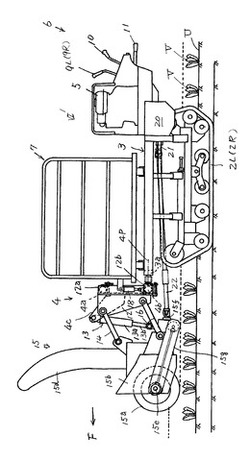
【課題】従来雪下の野菜収穫のための除雪作業手段は人手によるほかなかったが、除雪作業を機械化することで軽労化をはかる。
【解決手段】走行車体1に除雪装置15を装着し該走行車体1を圃場に形成する畝に沿って走行させながらこの畝面U及び該畝面Uに生育する野菜V,V…に堆積する積雪を上記除雪装置1によって生育した野菜V,V…を残して除去することによって、主として手作業に頼る収穫作業の際の除雪作業を無くしあるいは省力化し、該収穫作業の軽労化及び能率向上を図ることができる。
(もっと読む)
歩行型草刈り機

【課題】 地面の状況にかかわらず草の刈り過ぎや刈り残しを無くすことができる歩行型草刈機の提供。
【解決手段】 クローラ11による走行駆動部1の前側に、昇降機構5により昇降可能な刈取部3を備えた歩行型草刈り機において、刈取部3が走行駆動部1に対しローリング軸受け機構6を介してセンターローリング可能に連結されている。
(もっと読む)
歩行型草刈り機
【課題】 刈取部を昇降する昇降機構の操作をハンドルを握った状態のままで操作することができる遠隔操作機構を備えた歩行型草刈機の提供。
【解決手段】 駆動輪を備えた走行駆動部の前側に、昇降機構により昇降可能な刈取部を備え、走行駆動部の後側にハンドル部を備えた歩行型草刈り機において、
前記昇降機構を操作する遠隔操作機構がハンドル部に位置する操作者の近くに備えられている構成とした。
(もっと読む)
歩行型草刈り機
【課題】 果樹園の低い枝の下や、壁際など、車体が入れない箇所でも草刈りを可能とする歩行型草刈機の提供。
【解決手段】 クローラ11による走行駆動部1の前側に、昇降機構5により昇降可能な刈取部3を備えた歩行型草刈り機において、走行駆動部1の前側には先端側に左右一対のキャスター21、21を備えた支持フレーム2が走行駆動部1に対し横スライド可能な横スライド機構4を介して連結され、刈取部3は支持フレーム2に対し昇降機構5を介して昇降自在に吊下されている構成とした。
(もっと読む)
苗移植機
【課題】メカロックを発生させることなく、旋回時により確実に苗植付部を上昇させることのできる苗移植機を提供すること。
【解決手段】苗移植機1に、走行車体2に設けられて走行車体2を操舵するハンドル31と、走行車体2の後部に配設されると共に、苗を圃場に植え付ける苗植付部40と、苗植付部40を上昇させることができる苗植付部上昇機構50と、ハンドル31を操舵することにより回動するステアリングアーム60と、ステアリングアーム60の回動に連動し、苗植付部上昇機構50を作動させることができるオートリフト作動アーム70と、伸縮性を有してステアリングアーム60とオートリフト作動アーム70とを連結することにより、双方の距離が変化可能な状態でステアリングアーム60の回動をオートリフト作動アーム70に伝達する連結スプリング75とを備える。
(もっと読む)
苗移植機
【課題】簡易な構成の旋回内側の伝動調節によってコストの低減とやメンテナンス性の向上を図り、突然のスリップ発生にも対応を可能として植付精度と作業能率を確保でき、かつ、旋回に必要な出力の確保が可能となる苗移植機を提供する。
【解決手段】苗移植機は、全輪駆動の前後輪10,11を備えた走行車体2と、前輪10のデフロック機構51a付きデフ装置51と、後輪11のクラッチ機構18cと、旋回内側の後輪伝動を停止する制御ロッド部材52と、旋回時に昇降リンク機構3により上昇可能に支持した植付装置4とを備えて構成され、上記左右のクラッチ機構18c,18cの動作規制により左右の後輪動力を維持可能に設定するクラッチ設定機構53を設け、機体旋回時の前輪10のスリップによるデフロック機構51aの作動とともに植付装置4の上昇位置を低く抑える上昇規制機構Cを上記昇降リンク機構3に設けたものである。
(もっと読む)
苗移植機
【課題】
苗載せ台を畦際側とは反対側へ移動させるときは、苗植機の走行を直ちに停止して、植付装置の植付操作を停止して、苗タンクを目的の方向へ大きく移動させて、苗移植機の旋回操作等を行わせる。又、この一旦横端へ移動させていた苗タンクを移動前の苗植付停止位置に戻してから、苗移植機の植付動作を行わせる必要があり、煩雑で正確な操作を要し、相当の時間と熟練を要する。
【解決手段】
植付装置3の伝動を停止した状態で苗タンク2を横端へ移動させるときの、摺動軸1の横送回転数をタンク送りセンサ6で検出し、この苗タンク2が横端に移動した後に前記苗植作用を開始するときは、前記タンク送りセンサ6が検出した横送回転数に基づいて摺動軸1を伝動回転して、前回苗植停止位置に苗タンク2を移動復帰する構成とする。
(もっと読む)
乗用型苗移植機
【課題】 乗用型苗移植機において、旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性の点において課題があった。
【解決手段】 苗移植作業装置を上昇させると共に走行距離算出手段にて走行距離の算出を開始し、該走行距離に応じて、先ず苗移植作業装置が下降する指令を出力し、その後、前記走行距離に応じて、線引きマーカ(195)が下降する指令を出力する制御装置(170)を設けた。
(もっと読む)
作業車の車体状態切り換え構造
【課題】車体の状態を第1状態から第2状態に切り換える際の判断基準に創意工夫を凝らすことにより、作業走行時において車体の状態が不測に第1状態から第2状態に切り換わる誤作動の発生を抑制し、その誤作動に起因した不都合の発生を抑制する。
【解決手段】操舵輪の直進位置からの切れ角を検出する切角センサ55と、この切角センサ55の検出に基づいて車体の状態を切り換える車体状態切換手段48とを備えた作業車の車体状態切り換え構造において、車体の走行速度を検出する車速センサ56を備え、車体状態切換手段48が、切角センサ55の検出、および、車速センサ56の検出に基づいて、車体の旋回角度を算出し、かつ、算出した旋回角度が設定角度を超えると、車体の状態を車体に連結した作業装置を機能させる作業用の第1状態から作業装置を機能させない移動用の第2状態に切り換えるように構成した。
(もっと読む)
苗移植機
【課題】 旋回時、植え付け装置を機械的に自動上昇させる、安価な苗移植機の実現。
【解決手段】 走行車体2の車輪10の方向を制御するピットマンアーム60と、走行車体2の後側に設けられ、昇降油圧シリンダによって昇降させられる植え付け装置と、植え付け装置の昇降、植え付けを設定するための植え付け昇降レバー33と、昇降レバー33の操作に従って、昇降油圧シリンダを制御するカム74、位置決めローラ77等と、ピットマンアーム60に連結された連繋部材61、62、64、71と、連繋部材61、62、64、71に連結された旋回切替操作具73とを備え、旋回切替操作具73は、操舵部材が所定量以上回動すると、カム74、ローラ77などを機械的に駆動することによって植え付け装置52を上昇させるモードと、操舵部材が所定量以上回動しても、カム74、ローラ77などを駆動しないモードが選択出来る。
(もっと読む)
農業用作業車両
【課題】簡単な構成で旋回操作の開始及び終了を検出することが可能な農業用作業車両を提供する。
【解決手段】サイドクラッチ操作機構45は、ステアリングハンドル7が所定の操作量以上操作された場合に、サイドクラッチを切断する。クラッチセンサ49L,49Rは、サイドクラッチの作動状況を検出可能である。制御部は、植付部を昇降駆動するための昇降シリンダの駆動を制御する。植付クラッチは、植付部に対する駆動力の伝達の有無を切換可能である。また、前記制御部は、植付部の作動中において、植付クラッチの切断、サイドクラッチの切断、及び後進操作を、旋回時自動昇降制御の開始トリガとして検出可能である。そして、前記制御部は、開始トリガのうち何れか1つを検出すると、植付部を上昇させ、その後、前記サイドクラッチの接続を検出すると、植付部を下降させる。
(もっと読む)
ロータリ耕耘機
【課題】上げ下げされる可動部を備えたロータリ耕耘機において、可動部を上げ下げするための電動モータの着脱の容易化を図る。
【解決手段】可動部28,9,8を上げ下げさせるための可動部操作装置33L,85,108の回転操作杆の軸芯方向一端側に、該回転操作杆を電動モータ56の動力によって回転させるべく該電動モータの出力軸62を嵌脱自在に嵌合させるための嵌合部を設けたロータリ耕耘機において、電動モータ側に、揺動自在に枢支されていて出力軸を嵌合部に嵌合させた状態で揺動させることにより可動部操作装置側に設けた抜止め部に係脱自在に係合して出力軸の嵌合部からの抜け止めをする係合部材を設け、且つ、電動モータ側と可動部操作装置側との間に、出力軸の嵌合部への嵌合動作、或いは、係合部材の抜止め部への係合動作によって電動モータの本体部分の出力軸軸芯廻りの回転を規制する回転規制手段59を備える。
(もっと読む)
ロータリ耕耘機
【課題】上げ下げされる可動部を複数備えたロータリ耕耘機において、各可動部を電動モータによって上げ下げさせるに際して、コスト低下、重量軽減、誤操作防止を図る。
【解決手段】可動部28,9,8を上げ下げさせるための可動部操作装置33L,85,108を各可動部28,9,8に対してそれぞれ設け、各可動部操作装置33L,85,108は、可動部28,9,8を上げ下げさせるべく軸芯廻りに回転操作される回転操作杆を備え、各回転操作杆の軸芯方向一端側に、該回転操作杆を電動モータ56によって回転駆動させるべく、該電動モータ56の出力軸62を嵌脱自在に嵌合させるための嵌合部を設け、各可動部操作装置33L,85,108の回転操作杆の嵌合部を、一つの電動モータ56の出力軸62を嵌合できるよう形成する。
(もっと読む)
作業機
【課題】後進時に作業部の上昇操作によって機体を上昇させる作業機において、機体の動作状況をオペレータに直感的に把握させることができる構成を提供する。
【解決手段】作業機としてのコンバインが備える制御部は、主変速レバーの後進操作が検出されている場合において、刈取部が最上端位置にある状態で、刈取部昇降スイッチの上昇側操作が検出されると、機体昇降シリンダによって機体を上昇させる機体上昇制御を行う。そして、制御部は、この機体上昇制御とともに、ブザーによって機体の上昇を報知する。この状態で、主変速レバーが前進操作に切り替えられたことが検出されると、制御部は、機体の高さを所定位置まで下降させる機体下降制御を行うとともに、ブザーによって機体の下降を報知する。
(もっと読む)
対地作業部付設の作業車両
【課題】圃場における作業領域と作業能率を損なうことなく、機体旋回の終了間際のリスクを抑えて安定した作業走行の再開を可能とする対地作業部付設の作業車両を提供する。
【解決手段】作業車両は、作業位置に下降可能な作業部と、駆動輪の伝動を左右個別に切替え可能なサイドクラッチと、これら作業部およびサイドクラッチのそれぞれについて、直進時は作業位置および両側伝動、旋回時は非作業位置および旋回内側を非伝動に制御する制御部とを備えて構成され、この制御部は、操舵装置による旋回動作の開始により旋回走行距離を計測しつつ、次の直進動作の開始の時に、サイドクラッチを両側伝動に切替えるとともに、この時点以降で所定の旋回走行距離に至る間に、作業部を作業位置に切替えるものである。
(もっと読む)
作業車の作業装置昇降構造
【課題】作業車の作業装置昇降構造において、旋回の終了に伴って上昇状態の作業装置が地面まで自動的に下降駆動されるように構成した場合、作業装置が下降駆動されるタイミングのばらつきを抑える。
【解決手段】機体が旋回を開始したと判断する旋回開始判断手段と、旋回開始判断手段により機体が旋回を開始したと判断されてからの旋回中の機体の走行距離Eを連続的に検出する走行距離検出手段とを備える。走行距離検出手段により検出された機体の走行距離Eが設定距離E1に達すると、上昇状態の作業装置を地面まで自動的に下降駆動させる自動下降手段を備える。
(もっと読む)
乗用型作業機
【課題】 旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性の点において課題があった。
【解決手段】 機体にエンジンからの動力を各別に入り切りする左右サイドクラッチ(SC)を介して駆動される左右後輪を設け、作業装置を昇降可能に備えて対地作業しつつ走行する機体の旋回動作を制御するとともに、その旋回動作と連動して作業装置の稼動と昇降を制御する制御部を備える乗用型作業機において、該作業装置の稼動、下降、または上昇を制御する為に機体の走行距離を検出する検出装置(S)を設け、該検出装置(S)は、回転検出用の歯車回転体(K)の回転数を検出する構成とした。
(もっと読む)
農作業機
【課題】走行中は作溝器が不用意に圃場に作溝跡を作って、圃場を荒らさないようにした農作業機を提供すること。
【解決手段】ハンドル操向角度検出センサ109によりハンドル14が所定値まで操向操作されると制御装置110により、まず作溝器用油圧シリンダ89が作溝位置にある作溝器(溝切り装置)95を非作溝位置まで上昇させ、次いで播種装置用油圧シリンダ46を作動させて作業位置にある播種装置82を非作業位置まで上昇させ、また旋回終了直前又は旋回終了を判断すると、まず播種装置82が作業位置まで下降させ、次いで作溝器95を作溝位置まで下降する作動を行わせることで、作溝器95を播種装置82より先に上昇させて、また上昇した作溝器95を播種装置82より後で圃場に降ろすことで、圃場を荒らしたり、作物を傷めたりすることを防止できる。
(もっと読む)
作業車の作業装置昇降構造
【課題】作業車の作業装置昇降構造において、旋回の終了に伴って上昇状態の作業装置が地面まで自動的に下降されるように構成した場合、作業装置が下降されるタイミングのばらつきを抑える。
【解決手段】機体の旋回が開始されてから前輪1の操向角度を検出する角度センサー31の検出値が操向限度B側から設定角度A2に達すると、又は機体の旋回が開始されてからの機体の走行距離を計測する距離センサー27の計測値が設定距離に達すると、又は機体の旋回が開始されてからの時間の経過を計測するタイマーの計測値が設定時間に達すると、上昇状態の作業装置が地面まで自動的に下降されるように構成する。
(もっと読む)
1 - 20 / 37
[ Back to top ]