
Fターム[2B304QA24]の内容
Fターム[2B304QA24]の下位に属するFターム
Fターム[2B304QA24]に分類される特許
1 - 15 / 15
作業車両
【課題】
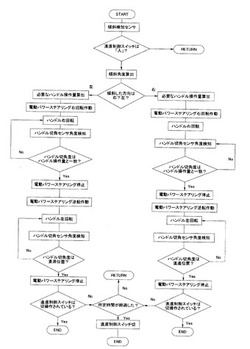
操舵部材を直進位置に保持して自動直進走行を行なうことができると共に、機体が傾斜すると自動的に進行方向を修正することのできる作業車両を提供する。
【解決手段】
走行車体2に操舵輪10を設け、操舵輪10を操作する操舵部材34を設け、走行車体2に機体の傾斜を検出する傾斜検知部材101を設け、傾斜検知部材101が左右方向の傾斜を検知すると操舵部材34を操作して走行車体2の進行方向を補正する作業車両において、操舵部材34を操作自在な自由状態と、操舵部材34を直進位置に保持する保持状態に切り替える操作切替部材103を設け、操作切替部材103を保持状態に操作していても傾斜検知部材101が機体の傾斜を検知すると、操舵部材34の保持を解除して傾斜方向の反対側に操作する構成とする。
(もっと読む)
薬液散布作業車両

【課題】旋回時などに散布ブームを障害物に接触させないように、自動的に昇降制御が可能な薬剤散布作業車両を提供することである。
【解決手段】薬液タンク18からの薬液を圃場に散布するセンターブーム43と左右のサイドブーム44と左右のサイドブーム44の上下動をそれぞれ行うための上下シリンダ29と左右の車輪12及び/又は13)の切れ角を検出するタイヤ切れ角センサ46と車輪(12又は13)の回転数を検出する車速センサ6とタイヤ切れ角センサ46の旋回角度の検知により自動的に旋回外側のサイドブーム44の上下動を行い、該サイドブーム44の上げ速度は車速センサ6の検出値に基づき決める制御装置100を備えた薬液散布作業車両である。
(もっと読む)
苗移植機
【課題】
走行車体が左右方向に傾斜すると、苗植装置が圃場面に対して略左右水平姿勢となるようにローリング駆動させ、苗の植付姿勢を安定させる苗移植機を提供する。
【解決手段】
圃場を走行する走行車体2の後部に苗を積載する苗載せ台4と、苗載せ台4の下部に苗載せ台4から苗を取って圃場に植える植付装置5からなる苗植装置6を設け、苗植装置6の傾斜量を検出する傾斜検知部材53を設け、傾斜検知部材53の検知に合わせて苗植装置6を左右方向に回動させるローリング機構Rを設けた苗移植機において、走行車体2に圃場の凹凸に対応して上下回動するローリング機構R2を設け、走行ローリング機構R2に所定量以上の回動を検知する走行ローリング検知部材49L,49Rを設け、走行ローリング検知部材49L,49Rが所定量以上の回動を検知したとき、ローリング機構Rの作動速度を減速させる構成とする。
(もっと読む)
作業車両
【課題】オペレータが作業中に昇降制御や姿勢制御が確実に行われていることを確認できるようにすると共に、昇降制御や姿勢制御における感度調節のための参考情報を容易に得られるようにする。
【解決手段】昇降制御、或いは姿勢制御を行うアクチュエータ24,32に対して伸張指令が出されているか、縮小指令が出されているか、又は制御不能な状態にあるか否か等を、座席に座ったオペレータが目視可能なセンターピラー9bに設ける表示ユニット57を介してオペレータに表示する。
(もっと読む)
農作業機
【課題】ローリングスプリング20と油圧ローリングシリンダ17によるロ−リング姿勢制御を自動的に切り替えることができる農作業機を提供することである。
【解決手段】所定時間内に走行部傾斜角センサ24の検出する傾斜角度の変化が所定範囲内であると、油圧ローリングシリンダ17が駆動制御しない状態として、緩衝部材20による苗植付装置6の姿勢変更を行い、前記傾斜角度の変化が所定範囲を超えると油圧ローリングシリンダ17によるロ−リング姿勢制御を行うように制御装置27がコントロールするので、苗植付装置6の姿勢変更を自動的に行うことができる。
(もっと読む)
農作業車
【課題】本発明では、機体の大部分を占める板金部分に角速度センサを取り付けるにあたり、板金の振動を拾い難い状態で角速度センサを取り付けて機体の傾きを正確に検出できるようにすることを課題とする。
【解決手段】センサ取付面54と機体取付面55からなるセンサブラケット53を、板金部材50の折曲部52の近傍に前記センサブラケット53のセンサ取付面54を配置する構成とし、前記板金部材50の直線部分51の略全域にわたって前記センサブラケット53の機体取付面55を重ねて張り付ける構成とし、前記センサ取付面54に機体の傾斜を検出する角速度センサ24を取り付けたことを特徴とする農作業車の構成とする。また、 前記板金部材50は操縦部CのステップSから立設していて上方に座席8を載置している仕切り板で構成したことを特徴とする農作業車の構成とする。
(もっと読む)
作業車両の制御装置
【課題】安価で、しかも作業機のローリング制御をタイミング良く行うことができるトラクタなどの作業車両を提供すること。
【解決手段】走行車両1に連結する作業機3が、走行車両1の旋回時に作業機3を上昇させないで圃場上に降ろしたまま旋回して作業する圃場の代かき作業機3である場合、このような作業時には、走行車両1は圃場の水平面上を比較的高速で走行しながら旋回するため遠心力が作業機3に作用し、スロープセンサ10はその遠心力によって、該センサ10中の粘性液が傾き、機体が傾斜したと判定してしまい、水平シリンダ16を伸縮し、作業機3が水平からずれてしまうことがある。そこで、ハンドル切れ角により旋回径を算出し、その旋回径と車速によりスロープセンサ10に働く遠心力によるスロープセンサ値の変化を補正値としてスロープセンサ検出値に加減算することで、実際の走行車両1の傾斜を判断でき、作業機3が水平となる。
(もっと読む)
トラクタの耕深自動制御装置
【課題】既耕地と未耕地との間に生じた凹部に片側の車輪が落ち込み機体が傾斜した場合に、耕深が一時的に深くなり耕耘跡に盛土が形成される不都合を解消する。
【解決手段】トラクタの制御装置8は、走行機体1に連結した耕耘装置3を、その深さセンサ15の検出値が深さ設定器17によって設定される耕深目標値となるように所定の不感帯をもって昇降制御する耕深自動制御と、走行機体1の傾斜に伴って耕耘装置3が左右に傾いたとき、耕耘装置3が所定の左右傾斜角に保たれるように耕耘装置3を傾斜制御する傾斜自動制御とを行うにあたり、走行機体1の傾斜に伴って耕耘装置3が左右に傾いて傾斜自動制御が行われる際には、走行機体1の傾斜が発生する前の深さセンサ15の検出値を耕深目標値として耕深自動制御を行う。
(もっと読む)
乗用型苗植機
【課題】 適切な位置で苗の植え付けができる制御装置を備えた乗用型苗植機を提供すること。
【解決手段】 エンジンからの動力が伝達される伝動装置と、該伝動装置からの出力で駆動する左右の後輪と、該後輪への伝動を入り切りするサイドクラッチと、昇降自在の苗植付部と、走行距離を検出する走行距離検出センサと、操向操作用のハンドルを走行車体に設け、ハンドルの操作角度が所定値以上になると走行距離検出センサにより走行距離の検出を開始し、該走行距離が設定距離に達すると報知する報知装置を設けたことを特徴とする乗用型苗植機とした。
(もっと読む)
農作業機
【課題】圃場の凹凸を検出しこれを均平にする。
【解決手段】代掻き作業機1は、走行機体に装着されて走行機体の走行に伴って進行し、走行機体からの動力によって回転するロータリ作業部13を備える。ロータリ作業部13の上方にシールドカバー15を設け、このカバー部の後端部にエプロン29を上下方向に回動可能に設け、エプロン29の後端部にレベラ31を上下方向に回動可能に設ける。ロータリ作業部13の前側に機体幅方向一端部から他端部間に亘って延びて上下方向に移動自在に支持された整地板23を設け、整地板23を移動自在に支持するリンク部材19に整地板23の上下移動から圃場の凹凸の高さを検出する凹凸検出センサ25を設ける。エプロン29は回動シリンダ51によって回動可能であり、凹凸検出センサ25によって検出された検出値に基づいて回動制御装置60が回動シリンダ51の作動を制御してエプロン29の傾き角度を調節する。
(もっと読む)
耕耘制御装置
【課題】車輌本体に対して昇降可能に連結された耕耘機の耕深深さを制御するための耕耘制御装置であって、耕耘作業開始時において、既耕耘地面の表面に凹凸が残ったり、前記耕耘機のハンチング現象が発生することを有効に防止し得る構造簡単な耕耘制御装置を提供する。
【解決手段】耕耘上面カバー435及び耕耘リヤカバー437を含む耕耘カバーがカバー回動用アクチュエータ700によって耕耘爪軸433の軸線回りに前後へ回動可能とされた耕耘機400の耕深位置hDを設定耕深位置hRに追従させる自動耕深制御を行うように構成された耕深制御装置は、前記耕耘機400を非耕耘状態位置hLから下降させて自動耕深制御での耕耘作業を開始させる際に、前記耕耘機400の接地から一定区間又は一定期間においては、前記自動耕深制御を停止すると共に、前記耕耘リヤカバー437の接地長さが延長されるように前記カバー回動用アクチュエータ700を作動させる。
(もっと読む)
乗用型苗移植機
【課題】旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、旋回操作性の点において課題があった。
【解決手段】操向用の左右前輪6を設けた走行車両1に苗移植作業装置3を昇降自在に装着した乗用型苗移植機において、左右前輪6を所定角度以上に操向操作すると苗移植作業装置3を上昇させる指令を出力して苗移植作業装置3を上昇させ、且つ、走行距離算出手段にて走行距離を算出して、該走行距離に応じて苗移植作業装置3が下降する指令を出力する自動旋回モード中に、機体に設けた車両傾斜センサS4が機体の所定角以上の傾斜検出をすると、該自動旋回モードを中止する制御装置170を設けた乗用型苗移植機。
(もっと読む)
農用作業車の制御装置
【課題】枕地での作業精度を向上させる。
【解決手段】旋回走行しうる走行機体に対して昇降可能な作業装置を設け、走行機体には作業装置の非作業位置への上昇及び作業位置への下降の各動作を旋回走行過程における所定のタイミングで行なう自動旋回制御装置を備える。作業装置にはフロートを備えて、フロートの接地により圃場面を均平整地可能に構成し、フロートの接地走行時には作業装置を所定の対地高さとなるように昇降制御可能に構成する。この昇降制御装置の制御感度が所定値より鈍感側に設定されると、前記自動旋回制御装置の実行を停止する。
(もっと読む)
作業機の傾斜制御装置
【課題】 角度センサ27からの検出情報に基づいて姿勢制御用の駆動機構を作動制御して作業装置を所定の傾斜姿勢に安定維持させるよう構成した作業機の傾斜制御装置において、安価に入手できる角度センサを用いた簡単な角度検出手段を用いて安定した傾斜制御を比較的精度よく行えるようにする。
【解決手段】 角度センサ27からの検出情報の低周波成分に基づいて姿勢制御用の駆動機構を起動させ、角度センサ27からの検出情報の高周波成分に基づいて駆動機構の作動を停止させる。
(もっと読む)
走行機に連結される作業機
【課題】 水田等の圃場の作業残隅部の作業処理は、その作業がトラクタを反転させる等の困難な作業が多かった。また、畦等の被作業面が直線でない場合や、草や樹木などの異物がある場合正確に作業が行えない課題があった。
【解決手段】 作業機Aは、装着フレーム1等に設ける回動支点14を中心に回動可能かつ伸縮可能な回動部2と、回動部2に設けた作業部回動支点32を中心に回動可能な作業部3と、回動部2の回動変位量及び伸縮量と作業部3の回動変位量とを制御する制御部4と、制御部4を操作可能な操作部5を有し、作業部3は、走行機Bを走行させた状態で走行機Bの進行方向にほぼ平行な面を作業面34aとして作動することが可能であり、かつ走行機Bの後方に位置させた状態で走行機Bの進行方向とほぼ直交する面を作業面34bとして作動することが可能である。
(もっと読む)
1 - 15 / 15
[ Back to top ]