
Fターム[2B382JC01]の内容
収穫機の構成要素−往復動刃型刈取部 (4,037) | 操作装置又は表示、警報装置の配置 (67) | 運転部又は運転部付近に配置 (39)
Fターム[2B382JC01]に分類される特許
1 - 20 / 39
コンバイン
【課題】刈取部が接地した場合であっても刈取部が地中に突き刺さってしまう前に刈取部を上昇させることができるコンバインを提供する。
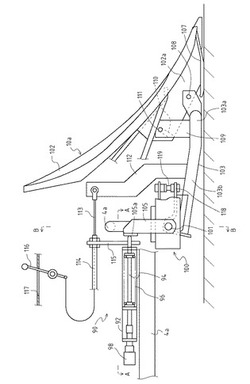
【解決手段】コンバインは、刈取部4を昇降させる油圧シリンダ9と、刈取部4の接地を検出する接地式刈高さセンサ90と、接地式刈高さセンサ90の検出結果に基づいて、油圧シリンダ9を駆動させて刈取部4の上昇制御を行う制御装置70と、を備え、刈取部4が接地した際の走行速度vが第二設定速度V2以上の場合、制御装置70は、刈取部4の上昇速度を速くする制御を行う。
(もっと読む)
コンバインの刈高さ制御装置

【課題】刈取部のデバイダや刈刃装置が圃場面に接触して破損する可能性を大幅に低減させる。
【解決手段】主変速レバー24の操作に応じて車速が増減される走行機体1aと、該走行機体1aの前部に昇降自在に連結される刈取部2と、該刈取部2の刈高さを制御する制御部34とを備えるコンバイン1において、主変速レバー24による車速の急減速操作を判断するとともに、該急減速操作を判断したとき、車速の急減速に伴う走行機体1aの前傾状のピッチングを想定し、刈取部2を所定の高さまで自動的に上昇させるピッチング刈高さ制御手段34aを備える。
(もっと読む)
コンバイン
【課題】刈取部の上昇に連動して刈取クラッチを入り状態から切り状態に切り換える連動操作機構を少ない部品点数で組み立てやすく構成する。
【解決手段】刈取クラッチ6のテンションアーム46と、刈取クラッチレバー16とを操作ワイヤ50のインナーワイヤ50Aで連結し、この操作ワイヤ50のアウターワイヤ50Bの一端を中間部材55に連結した。刈取部Bに備えた規制部材59Cと中間部材55との間に作動部材60を備え、刈取部Bが設定レベルを超えて上昇した場合に作動部材60の先端に規制部材59Cを当接させ、作動部材60から中間部材55に押圧力を作用させ、この中間部材55の揺動により刈取クラッチ6の切り操作を行うように構成した。
(もっと読む)
コンバインの刈高さ制御装置
【課題】
比較的大きな凹凸部がある圃場での刈取作業でも、刈取部の分草杆の地面への突入を防止しながら刈取作業を行なえるものとする。
【解決手段】
刈取搬送部(7)を昇降させる昇降手段(15)と、刈取搬送部(7)の対地高さを検出する刈取接地センサ(SE2)と、刈取搬送部(7)の対機体高さを検出する刈高さセンサ(SE3)とを備えたコンバインにおいて、刈高さセンサ(SE3)の検出値と目標刈高さ設定値に基づいて昇降手段(15)を作動させる刈高さ昇降制御を実行し、刈高さ昇降制御の実行中に刈取接地センサ(SE2)によって検出される刈取搬送部(7)の対地高さが、刈取接地センサ(SE2)の接地部が地面より上方に離れた場合に検出される離間基準値以上の値になった場合に、刈取搬送装置(7)を下降させる側の出力を停止するコントローラ(21)を設ける。
(もっと読む)
コンバインの前処理昇降制御装置
【課題】刈高さ解除制御で下降させ過ぎた前処理部を少しだけ上昇させるためにマルチステアリングレバーを上昇操作すると、刈高さ解除制御のためにトリガースイッチを操作していることで前処理部が自動上昇駆動してしまい、オペレータの想定を超えて前処理部が上昇するという課題があった。
【解決手段】刈高さ解除制御手段(21C)の作動中は、前処理操作検出手段(22)による昇降操作レバー(11)上昇操作を入力しても、自動昇降制御手段(21A)による前処理部(5)の自動上昇駆動を行わないように牽制した。
(もっと読む)
コンバイン
【課題】刈取部が地上面に突っ込んで損傷等されるという不具合の発生を回避すること。
【解決手段】左右一対の走行部間に昇降自在に架設した機体本体と、機体本体の前端部に昇降自在に取り付けた刈取部とを備えたコンバインにおいて、機体本体に設けた作業部のクラッチを切断させる作業終了操作と、機体本体を設定位置まで下降させる下降復帰制御と、刈取部を地上面に接地させないように地上高を制御する地上高制御とを連動させた。作業部のクラッチを切断させる作業終了操作を行うと、機体本体を設定位置(例えば、最下位置)まで下降させる下降復帰制御がなされるとともに、刈取部を地上面に接地させないように地上高を制御する地上高制御がなされる。
(もっと読む)
作業車両
【課題】作物の摘心作業の作業効率が向上すると共に、作業者の負担を軽減できる作業車両を提供することである。
【解決手段】走行装置3,4と、走行装置3,4上に、操縦席5と、作物に散布するための薬剤を貯留する薬剤貯留部6と、薬剤貯留部6内の薬剤を作物に散布する散布ブーム140と、作物の上部を切断するための刈刃27を備えた刈刃装置30とを設けた作業車両である。散布ブーム140を取り外すことなく摘心作業を行えるため、作業前の準備が不要であり、作業者の負担を軽減できると共に、速やかに摘心作業を開始できる。また、摘心作業と薬剤散布作業を同時に行うことができるため、別々に行う場合に比べて作業回数を低減でき、摘心作業と薬剤散布作業の作業効率が向上し、省エネルギー化にも繋がる。
(もっと読む)
自走式草刈機
【課題】本発明は草刈り作業が1人で楽に且つ確実に行えると共に小石や株などの破片の飛散を気にすることなく作業が行える自走式草刈機を提供することを目的とする。
【解決手段】バリカン方式の草刈刃体1の基部1bを支点として左右に振られる揺動手段Aを備え、該揺動手段Aが、2枚の刃板1aを重ね合せて長手方向に摺動自在に支持すると共にその内部に摺動機構を設けた支持ケース2と、エンジン側に連結する刃駆動軸3と、該刃駆動軸3に挿入して一端を支持ケース2に固着させ且つベアリング4を介在させて支持ケース2が回動可能に支持される中空軸5と、チェーン機構部6と、そのチェーン大歯車61を軸支する支軸64が固着されると共に長穴71を有したカム板7と、該カム板7の長穴71に沿って摺動するピン81を有した回転板8とから成され、この回転板8を回転させる回転板駆動手段Bが備えられると共にそれにクラッチ13を設けた構造とする。
(もっと読む)
乗用型作業車両
【課題】乗用型の摘心作業車両において、刈刃を直接エンジンによって駆動する形態のものでは、通常、エンジン始動用入り切りスイッチは、エンジン付近に設けられており、作業中、一時的にエンジンを停止するときには、運転席より一旦降りてからエンジンを停止しなければならず、操作性が著しく低下する問題があった。
【解決手段】本発明は、自走しながら作物の先端部を切断処理するバリカン式刈刃10と、該バリカン式刈刃10を駆動する刈刃駆動用エンジン11を備えた摘心作業装置12を、走行車体1の前部に装着された昇降可能な昇降リンク機構8部に支持させて設け、刈刃駆動用エンジン11の始動用入り切りスイッチ20を乗用運転操作部近くに配備してあることを特徴とする乗用型作業車両の構成とする。
(もっと読む)
コンバイン
【課題】構造の簡素化及び低コスト化を図るようにしながらも、副切断装置の高さ調整を主切断装置とは別個に行える状態と、主切断装置の高さ変更に連動して副切断装置を姿勢変更させる状態とに切り換えることを、確実に行わせる。
【解決手段】主切断装置9が刈取搬送装置3に支持され、副切断装置14が走行機体2に上下揺動自在に装備させた昇降フレーム13A,13Cに支持され、刈取搬送装置3に対する副切断装置14の昇降作動の連係状態を切換操作自在な連係手段Bが、長孔が形成された案内部材51を副切断装置14側に、且つ、長孔に沿って移動自在に係合案内される被案内体52を刈取搬送装置3側に設けて、被案内体52の長孔に沿う移動を規制する連係用操作状態と被案内体52の長孔に沿う移動を許容する連係解除用操作状態とに切り換え自在な切換操作体53を案内部材51に備えて構成される。
(もっと読む)
作業機
【課題】作業部を備える作業機において、容易かつ効率的な操作で作業部及び機体を昇降させることができるとともに、作業部を用いた作業に速やかに移行できる構成を提供する。
【解決手段】作業機としてのコンバインが備える制御部は、主変速レバーの前進操作が検出されている場合において、刈取部が所定位置より上昇側にある状態で、刈取部昇降スイッチの上昇操作が検出されると、機体昇降シリンダによって機体を上昇させる機体上昇制御を行う。また、制御部は、機体上昇制御が行われた後に、刈取部昇降スイッチの下降操作が検出されると、機体の高さを予め設定される手動設定位置まで下降させる機体下降制御を行う。
(もっと読む)
植物剪断機
【課題】 本発明は、植物剪断機において、剪断作業の作業能率を向上させることを課題とする。
【解決手段】 前後左右に計4個の走行体(2)を設け、植物を剪断する剪断刃(11)を左右の走行体(2)間に配置し、上下方向の軸(2a)回りに走行体(2)を直角に操向可能に構成した。
また、剪断刃(11)を支持する剪断刃フレーム(18)に、操縦ハンドル(19)を設けた。
また、左右の走行体(2)を装着する左右各々の走行部フレームを設け、左右の走行部フレームに左右各々の牽引用のロープ(21)を設けた。
また、左右の走行部フレームを繋ぐ複数の左右フレーム(4)を伸縮可能に設け、左右フレーム(4)に沿って左右移動する左右移動体(10)を設け、該左右移動体(10)を介して剪断刃(11)を支持した。
(もっと読む)
コンバイン
【課題】単純な操作により自動昇降制御を行うために、刈取作業中に誤操作をしてしまい未刈り穀稈を踏み倒す可能性があった。
【解決手段】自動昇降指令する自動昇降操作手段(20)を設け、制御手段(21)は、自動昇降操作手段(20)の操作を入力中に前処理操作検出手段(22)による昇降操作レバー(11)操作を入力すると、前処理高さ検出手段(25)の入力に基づいて前処理部(5)が設定目標位置まで自動昇降するように、昇降駆動手段(4)を昇降操作レバー(11)の操作方向に駆動制御する。
(もっと読む)
コンバインによる収穫方法とこの収穫方法に使用するコンバイン
【課題】刈取り前処理部の圃場への突っ込みや沈み込みを防止しながら収穫作業できるコンバインによる収穫方法を提供する。
【解決手段】刈取り前処理部10に作用する下降ストッパー手段8を効かせ、刈取り前処理部10を地面から設定刈り高さに浮上した連結高さに支持させながら、かつ、刈取り前処理部10が接地反力によって上昇操作されることを許容しながら収穫走行する。
(もっと読む)
動力工具
【課題】スイッチ本体のオン・オフ操作が安全、かつ確実に行われるスイッチ機構を備えるとともに、スイッチ機構を小型化することでハウジングをコンパクトにし、小型化、軽量化された動力工具を提供する。
【解決手段】該スイッチ機構は、該第2スイッチレバーの操作によって該スイッチ本体をオンする方向に移動する可動軸と、該スイッチ本体と該第1スイッチレバーとの間に位置し、一端を該可動軸の先端に回動可能に軸支されたコンタクトレバーと、該コンタクトレバーの他端を該スイッチ本体をオンする方向に移動させる第1スイッチレバーと、該可動軸を常時下方に付勢する付勢部材とからなり、該第1スイッチレバーと該第2スイッチレバーの双方を操作したときにのみ該コンタクトレバーを介してスイッチ本体がオンすることを特徴とする。
(もっと読む)
コンバインの刈取昇降制御装置
【課題】刈取装置の点検や修理を行う際に、誤って刈取装置が下降してしまう不具合を少なくし、作業の安全性を高める。
【解決手段】走行車台(2)の前側に立毛穀稈を刈取り後方上部へ移送する刈取装置(4)を設け、該刈取装置(4)を昇降させる油圧シリンダ装置(7)を設け、該油圧シリンダ装置(7)への送油を電磁比例弁(8)で制御することにより刈取装置(4)の昇降速度を変更可能な構成とし、刈取ロック機構(9)によって該刈取装置(4)の下降を停止させる構成とし、該刈取ロック機構(9)のロック解除後に、最初の刈取下降操作時には下降出力を禁じ、主変速レバー(12)を停止位置へ操作するか又は該刈取装置(4)が上昇操作されたことを検出した後に、該刈取装置(4)の下降出力を許可する制御装置(13)を設ける。
(もっと読む)
刈取収穫機の刈取昇降制御装置
【課題】作業者の熟練度や作業状況の違い等に応じて適切な制御状態で昇降操作手段の作動を制御することが可能となる刈取収穫機の刈取昇降制御装置を提供する。
【解決手段】刈取部を昇降する昇降操作手段の作動を制御する制御手段Hが、自動制御処理を実行する制御モードとして、刈取部を上昇させる上昇処理及び刈取部を下降させる下降処理の夫々を実行する形態で昇降操作手段C1の作動を制御する自動昇降制御モードと、前記上昇処理及び前記下降処理のうちの前記上昇処理のみを実行する形態で昇降操作手段C1の作動を制御する自動上昇制御モードとを備えるように構成され、且つ、手動操作式のモード切換指令手段の切り換え指令に基づいて、前記自動昇降制御モードにて前記自動制御処理を実行する状態と、前記自動上昇制御モードにて前記自動制御処理を実行する状態とに切り換え自在に構成されている。
(もっと読む)
コンバイン
【課題】副切断装置の刈高さ制御を、主切断装置とは別個にも、連動しても行えるようにするにあたり、各種センサー類などを削減して、構造の簡素化、及び低コスト化を図る。
【解決手段】主切断装置32を走行機体に対して昇降操作自在に構成し、副切断装置41を走行機体側に揺動自在に装備させた昇降フレーム40に支持させて昇降自在に構成し、主切断装置32の昇降操作に連動して副切断装置41が昇降される連係状態と、主切断装置32の昇降操作とは別に独立して副切断装置41が昇降自在である連係解除状態とに、主切断装置32に対する副切断装置41の昇降作動の連係状態を切換操作自在な連係手段5を備えた。
(もっと読む)
刈取収穫機の刈取部昇降構造
【課題】刈取収穫機の刈取部昇降構造において、例えば畦際での旋回が終了して刈取部を圃場面に下降させて次の刈取行程に入る場合、刈取部の先端部分が圃場面の凸部に突っ込むような状態を少なくする。
【解決手段】刈取部4を昇降駆動する昇降機構と、人為的に操作される昇降操作具とを備える。上方に設定された上昇限度UU1及び下方に設定された下降限度DD1の範囲において、昇降操作具の操作により昇降機構を上昇側及び下降側に作動操作、昇降操作具の操作により昇降機構を停止操作する制御手段を備える。制御手段の下降限度DD1を高低に変更する変更手段を備える。
(もっと読む)
コンバイン
【課題】従来のコンバインは、自動的に刈取部が地面に追従して接地可能となっていると、刈取作業を行っていない場合においてまでも、刈取部が意図せず下降する、という問題があった。
【解決手段】刈取部6が地面に接地しているか否かを検知する接地検知センサ57と、刈取部6を昇降操作する上昇・下降操作スイッチ51・52と、を備え、制御部60は、刈取作業時に、接地検知センサ57によって刈取部6が地面に接地していないことを検知すると、刈取部6が下降する自動制御モードと、刈取作業時に、上昇・下降操作スイッチ51・52の昇降操作によって刈取部6が昇降する手動制御モードと、を切替可能に備え、自動制御モードである場合に、コンバインのエンジン10から刈取部6への動力を断接する刈取クラッチ37が切状態になると、手動制御モードに切り替わる。
(もっと読む)
1 - 20 / 39
[ Back to top ]