
Fターム[2B382LA22]の内容
収穫機の構成要素−往復動刃型刈取部 (4,037) | 制御、連動のための検出対象又は検出量 (268) | 速度、回転速度又は速度変化 (14) | 走行速度 (7)
Fターム[2B382LA22]に分類される特許
1 - 7 / 7
コンバイン
【課題】刈取部が接地した場合であっても刈取部が地中に突き刺さってしまう前に刈取部を上昇させることができるコンバインを提供する。
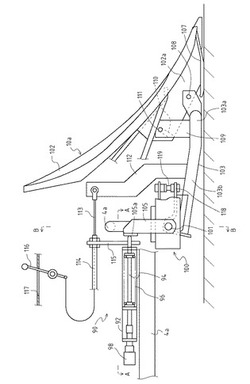
【解決手段】コンバインは、刈取部4を昇降させる油圧シリンダ9と、刈取部4の接地を検出する接地式刈高さセンサ90と、接地式刈高さセンサ90の検出結果に基づいて、油圧シリンダ9を駆動させて刈取部4の上昇制御を行う制御装置70と、を備え、刈取部4が接地した際の走行速度vが第二設定速度V2以上の場合、制御装置70は、刈取部4の上昇速度を速くする制御を行う。
(もっと読む)
コンバインの刈高さ制御装置

【課題】刈取部のデバイダや刈刃装置が圃場面に接触して破損する可能性を大幅に低減させる。
【解決手段】主変速レバー24の操作に応じて車速が増減される走行機体1aと、該走行機体1aの前部に昇降自在に連結される刈取部2と、該刈取部2の刈高さを制御する制御部34とを備えるコンバイン1において、主変速レバー24による車速の急減速操作を判断するとともに、該急減速操作を判断したとき、車速の急減速に伴う走行機体1aの前傾状のピッチングを想定し、刈取部2を所定の高さまで自動的に上昇させるピッチング刈高さ制御手段34aを備える。
(もっと読む)
刈取収穫機の刈取昇降制御装置
【課題】 刈取部の損傷を回避することができながらも、倒伏している茎稈の刈取作業をも良好に行える刈取収穫機の刈取昇降制御装置を提供する。
【解決手段】 刈取部2を走行機体Vに対して昇降操作する昇降操作手段C1と、刈取部2に備えられた接地式の対地高さ検出手段Aと、刈取部2の目標対地高さを設定する目標対地高さ設定手段54と、対地高さ検出手段A及び目標対地高さ設定手段54の情報に基づいて昇降操作手段C1を制御する刈取昇降制御を実行する制御手段Hとが備えられ、制御手段Hが、刈取昇降制御として、目標対地高さ設定手段54にて設定される目標対地高さが上昇速度切換用設定高さ以上のときよりも、上昇速度切換用設定高さ未満のときの方が、刈取部2を低速で上昇させるように、昇降操作手段C1を制御するよう構成されている。
(もっと読む)
刈取収穫機の刈取昇降制御装置
【課題】 刈取部の損傷を回避することができながらも、刈取作業を良好に行えるようにすることが可能となる刈取収穫機の刈取昇降制御装置を提供する。
【解決手段】 走行機体Vの走行速度を検出する走行速度検出手段60が設けられ、制御手段Hが、刈取昇降制御として、走行速度検出手段60にて検出される走行速度が設定速度以上である場合には、複数の対地高さ検出手段Aのいずれかが目標対地高さよりも低い値を検出する少数検出状態である場合に刈取部2を上昇させ、且つ、走行速度検出手段60にて検出される走行速度が設定速度未満である場合には、複数の対地高さ検出手段Aのうちの2個以上の対地高さ検出手段Aが又は全ての対地高さ検出手段Aが目標対地高さよりも低い値を検出する多数検出状態である場合に刈取部2を上昇させる形態で、昇降操作手段C1を制御する。
(もっと読む)
コンバイン
【課題】刈取部を実際の機体の姿勢に即した昇降位置に速やかに昇降させて、該刈取部の地面への突っ込みや高刈りを確実に防止する。
【解決手段】機体に昇降制御可能に支持した刈取部4と、該刈取部4を昇降手段により昇降制御する制御手段30とを備えるコンバイン1において、前記機体の水平基準面に対する前後傾斜角度を検出する傾斜角検出手段32と、前記機体のピッチングの角速度を検出する角速度検出手段33と、前記刈取部4の機体に対する昇降位置を検出する昇降位置検出手段35とを備え、前記制御手段30により傾斜角検出手段32の検出値と角速度検出手段33の検出値とに基づいて検出後の機体の姿勢を予測し、その予測結果に応じて設定した予測昇降位置まで前記刈取部4を昇降させる昇降制御を行う。
(もっと読む)
コンバイン
【課題】穀稈搬送装置の駆動速度の変更によって、穀稈搬送装置によって搬送中の穀稈の搬送姿勢が乱れるのを防止できるものでありながら、穀稈引起装置穀稈引起速度だけを速くすることができたり、穀稈搬送装置だけを駆動できるようにしたコンバインを提供するものである。
【解決手段】コンバインにおいて、穀稈引起装置223を駆動する引起駆動用電動モータ90と、刈刃装置222を駆動する刈刃駆動用電動モータ91と、穀稈搬送装置224を駆動する搬送駆動用電動モータ92とを備え、穀稈引起装置223と刈刃装置222と穀稈搬送装置224とをその各々の電動モータ90,91,92によって駆動するように構成したものである。
(もっと読む)
コンバインの駆動制御装置
【課題】 エンジンの始動状態から刈取作業を行うときの操作の簡略化を図ることができるコンバインの駆動制御装置を提供する。
【解決手段】 制御手段Hが、作業指令手段Iにて作業開始指令が指令されると、アクセル手段42を定格回転状態にかつ脱穀クラッチ12を入り状態にする運転起動状態にすべく、切換操作用駆動手段Mの作動を制御するように構成され、且つ、運転起動状態において、運転状態検出手段Jの検出情報に基づいて刈取作業開始条件が満たされていることを判別すると、刈取クラッチ10を入り状態にし、かつ、運転状態検出手段Jの検出情報に基づいて刈取作業開始条件が満たされていないことを判別すると、刈取クラッチ10を切り状態にすべく、切換操作用駆動手段Mの作動を制御するように構成されている。
(もっと読む)
1 - 7 / 7
[ Back to top ]