
Fターム[2B382MA23]の内容
収穫機の構成要素−往復動刃型刈取部 (4,037) | 制御、連動の対象又は制御手法 (166) | 部材の位置移動又は回動 (103) | 前処理部又は刈取装置 (103) | 移動方向 (38)
Fターム[2B382MA23]の下位に属するFターム
Fターム[2B382MA23]に分類される特許
1 - 2 / 2
作業機
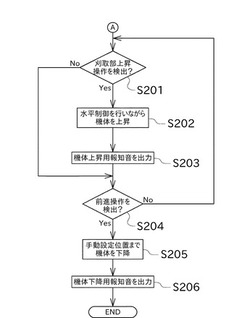
【課題】後進時に作業部の上昇操作によって機体を上昇させる作業機において、機体の動作状況をオペレータに直感的に把握させることができる構成を提供する。
【解決手段】作業機としてのコンバインが備える制御部は、主変速レバーの後進操作が検出されている場合において、刈取部が最上端位置にある状態で、刈取部昇降スイッチの上昇側操作が検出されると、機体昇降シリンダによって機体を上昇させる機体上昇制御を行う。そして、制御部は、この機体上昇制御とともに、ブザーによって機体の上昇を報知する。この状態で、主変速レバーが前進操作に切り替えられたことが検出されると、制御部は、機体の高さを所定位置まで下降させる機体下降制御を行うとともに、ブザーによって機体の下降を報知する。
(もっと読む)
刈取収穫機

【課題】 走行機体の水平基準面に対する前後傾斜角を設定傾斜角に維持しながら刈取作業を行うことが可能なものでありながら、刈取部が地面に突っ込むおそれを少なくすることが可能な刈取収穫機を提供する。
【解決手段】 刈取部10の対地高さが制御目標高さになるように刈取シリンダC1の作動を制御する刈取昇降制御並びに走行機体Vの水平基準面に対する前後傾斜角が設定傾斜角に維持されるように姿勢変更操作手段の作動を制御する姿勢制御を実行する制御手段が、刈取部10が地面に近付く形態で走行機体Vの前後傾斜角を前下がり傾斜方向に姿勢変更させているときは、目標対地高さ設定手段にて設定される目標対地高さに対応させて定めた基準対地高さよりも前傾斜操作用設定量だけ高い値を制御目標高さとして定め、走行機体Vの前後傾斜角を前下がり傾斜方向に姿勢変更させていないときは基準対地高さを制御目標高さとして定める。
(もっと読む)
1 - 2 / 2
[ Back to top ]