
Fターム[2B396LE18]の内容
脱穀機要素−籾処理 (10,947) | 穀粒搬送装置の移動又は変形 (893) | 対象搬送装置 (357) | 機外への搬送装置(排出筒) (333) | 縦搬送装置 (176) | 上に横搬送装置が接続 (110)
Fターム[2B396LE18]に分類される特許
1 - 20 / 110
コンバイン
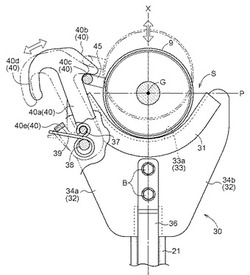
【課題】横オーガを固定するための係合部材を、支柱の複雑な改造を伴うことなく設置できるようにすること。
【解決手段】穀粒タンクの底部から穀粒を揚送する縦オーガと、この縦オーガの上端部に起伏揺動可能に連結され、縦オーガの縦向き軸心回りに旋回可能な横オーガ9と、この横オーガ9を収納位置において支持する受け台30とを備えるコンバインにおいて、受け台30が横オーガ9を収納するよう底部33aと該底部33aの両端から上方に延出された一対の縦向き部34a,34bとで構成される収納空間Sを備え、横オーガ9を受け台30の収納空間Sに収納した状態で、横オーガ9の外周面に設けてある被係合部材45に係合して横オーガ9を固定する係合姿勢及び被係合部材45から離れた係合解除姿勢に切換自在な係合部材40を、受け台30の縦向き部34aに設けてある。
(もっと読む)
コンバイン

【課題】排気装置に泥等が付着するのを防止しつつ、コンバイン全体のサイズが大きくなるのを防止し納まりを良くすることができるコンバインを提供する。
【解決手段】刈取、脱穀、選別後の籾を貯留するグレンタンク17と、エンジン34の排気ガスを排気音を低減させて排出する排気装置41と、を備えたコンバイン11において、排気装置41のテールパイプ61を、機体の前後方向略中央部から機体後方に延出し、テールパイプ61の排出口63は、グレンタンク17の上面より下方に配置した。また、テールパイプ61の排出口63は、収納時の排出オーガ21の横オーガ23より下方に配置した。
(もっと読む)
コンバイン
【課題】コンバインのメンテナンスの作業効率を向上させること。
【解決手段】自走機体の前部位置に運転部10を備え、運転部10の後方にグレンタンク5を備え、グレンタンク5の穀粒を排出するアンローダRが、グレンタンク5の前面5aに取付けられており、グレンタンク5が縦軸心Yの回りに、運転部10の後方にグレンタンク5の前面5aが位置する作業位置と、作業位置から横外側の非作業位置とに亘り移動可能に支持されている。
(もっと読む)
コンバイン
【課題】作業者の意に反して排出オーガが自動的に動き出してしまうのを防止することができるコンバインを提供する。
【解決手段】排出オーガ32と、排出オーガ32を昇降又は旋回させるオーガ用アクチュエータと、排出オーガ32が載置されるオーガレスト21と、排出オーガ32がオーガレスト21に載置されていることを検出するオーガレストセットセンサ57と、複数の操作手段を有し、前記操作手段の操作に応じて、排出オーガ32の動作についての遠隔指示を送信する遠隔操作装置80と、前記遠隔指示に基づいて前記オーガ用アクチュエータを駆動制御する制御手段60と、を具備するコンバイン1であって、制御手段60は、前記複数の操作手段のうち特定の複数の操作手段(オートリターンボタン80k及びシフトボタン80m)が同時に操作された場合、排出オーガ32をオーガレスト21に載置させるように自動的に昇降又は旋回させる。
(もっと読む)
コンバイン
【課題】遠隔操作装置がコンバイン本体から遠く離れている場合等における遠隔操作装置による排出オーガの操作を禁止することができ、操作ミスの発生を未然に防止することができるコンバインを提供する。
【解決手段】グレンタンク17内の穀粒を外部に排出する排出オーガ32と、各種ボタン(操作手段)の操作に応じて、無線通信を用いて排出オーガ32の動作についての遠隔指示を送信する遠隔操作装置80と、遠隔操作装置80からの遠隔指示に基づいて排出オーガ32の動作を制御する制御手段60と、を具備するコンバイン1であって、制御手段60は、遠隔操作装置80からの遠隔指示の受信レベルLが設定値L2(第一設定値)以上である場合に限り、当該遠隔指示に基づいて排出オーガ32を動作させる。
(もっと読む)
コンバイン
【課題】エンジンに洗浄な空気を効率的に供給できるプレクリーナと大容量のグレンタンクを備えたコンバインを提供する。
【解決手段】上記課題は、エンジン(E)に供給される燃焼用の空気を濾過するプレクリーナ(70)を、収納持の排出オーガ(8)よりも高く、グレンタンク(6)の上面よりも低いか又は同じ高さに配置することにより解決される。
(もっと読む)
コンバイン
【課題】オーガレストを非作業位置にした状態で、前処理部及びリールの両方を上昇駆動させると、排出オーガと干渉する。
【解決手段】オーガレスト9が、非作業位置にあることを検出し、かつリール11が上昇位置にあることを検出した場合、前処理部4の上昇を禁止する制御部38を備える。又は、オーガレスト9が、非作業位置にあることを検出し、かつ前処理部4が上昇位置にあることを検出した場合、リール11の上昇を禁止する制御部38を備える。
(もっと読む)
コンバイン
【課題】排出オーガが自動的に昇降又は旋回することを防止すると共に、オートセット機能の作動時において遠隔操作装置(リモートコントローラ)の無線通信に使用される電波が本機に届かなく場合であっても、排出オーガの自動的な昇降又は旋回を緊急に停止させることができるコンバインを提供する。
【解決手段】前記制御手段60は、前記複数の操作手段(ボタン80a・80d等)のうち特定の操作手段(オートセットボタン84)への操作に応じて送信された遠隔指示を継続して受信している場合には、前記排出オーガ32を自動的に所定の高さまで上昇させた後、所定の方向へ旋回させる一方、その継続していた当該遠隔指示の受信が途絶えた場合には、当該排出オーガ32の自動的な上昇又は旋回を停止させる制御を実行するものである。
(もっと読む)
コンバインの穀粒搬出装置
【課題】吐出筒からの穀粒のこぼれ落ちをシャッタによって精度よく防止できるコンバインの穀粒搬出装置を提供する。
【解決手段】横スクリューコンベヤ12の搬送経路17の吐出筒16に開口する出口18を開閉するシャッタ20を設けてある。シャッタ20は、出口18に対して横スクリューコンベヤ12の搬送筒12bの下方から横スクリューコンベヤ12のスクリュー軸芯Yに対して交差する方向に上昇して出口18を閉じる上昇閉じ位置と、出口18に対して搬送筒12bの下方に横スクリューコンベヤ12のスクリュー軸芯Yに対して交差する方向に下降して出口18を開く下降開き位置とに摺動昇降するように上下摺動自在に支持させてある。
(もっと読む)
コンバイン
【課題】簡易な構成により排出オーガの利便性及び操作性を向上させることができるコンバインを提供する。
【解決手段】制御手段60は、遠隔操作装置80における各種ボタンのうちオートリターンボタン83への押し操作に応じて送信された操作信号を継続して受信している場合には、排出オーガ32をオーガレスト21に載置させるように自動的に昇降又は旋回させる一方、その継続していた当該操作信号の受信が途絶えた場合には、当該排出オーガ32の自動的な昇降又は旋回を停止させる。
(もっと読む)
コンバインの穀粒排出構造
【課題】穀粒排出口に穀粒が滞留している状態でシャッタが閉状態に切り換わることに起因した不具合の発生を防止する。
【解決手段】穀粒タンクに貯留した穀粒を機外に排出する穀粒排出状態と穀粒の排出を停止する排出停止状態とに切り換え可能に構成した穀粒排出装置に、穀粒排出装置の穀粒排出口26を開閉するシャッタ28を備えたコンバインの穀粒排出構造において、シャッタ28の開閉を制御する制御手段40を備え、制御手段40が、穀粒排出装置の排出停止状態への切り換えを検知し、その検知後に穀粒排出口26の移動を検知した場合に、シャッタ28を閉状態に切り換えるように構成してある。
(もっと読む)
コンバインの穀粒排出構造
【課題】穀粒排出口で穀粒が滞留している状態でシャッタが閉状態に切り換わることに起因した不具合の発生を防止する。
【解決手段】穀粒排出口のシャッタの開閉を制御する制御手段と穀粒排出口での穀粒の滞留を検出する穀粒センサとを備え、制御手段が、穀粒排出装置の排出停止状態への切り換えを検知すると、穀粒センサが穀粒の滞留を検出しているか否かを判別し、穀粒センサが穀粒の滞留を検出している場合はシャッタを開状態に維持し、滞留を検出していない場合はシャッタを閉状態に切り換え、シャッタを開状態に維持している状態では、制御手段が、穀粒排出口の移動を検知したときに再び穀粒センサが穀粒の滞留を検出しているか否かを判別し、穀粒センサが穀粒の滞留を検出している場合はシャッタを開状態に維持し、滞留を検出していない場合はシャッタを閉状態に切り換えるように構成する。
(もっと読む)
コンバイン
【課題】穀粒を排出する際の遠隔操作装置による操作を簡素化し、作業性を向上させることができるコンバインを提供する。
【解決手段】排出オーガ32と、収納位置または排出位置に切り換え可能な穀粒排出筒体40と、オーガクラッチ33と、排出オーガ32がオーガレスト21に載置されていることを検出するオーガレストセットセンサ57と、無線通信を用いて排出オーガ32の動作についての遠隔指示を送信する遠隔操作装置80と、遠隔操作装置80からの遠隔指示に基づいて各種アクチュエータを駆動制御する制御手段60と、を具備するコンバイン1であって、制御手段60は、排出オーガ32がオーガレスト21から離れたことを検出した後、オーガクラッチ33を接続する旨の遠隔指示を最初に受信した場合、穀粒排出筒体40を排出位置に切り換えた後にオーガクラッチ33を接続させる。
(もっと読む)
穀粒排出構造
【課題】縦オーガと前記縦オーガの上部に上下方向回動可能に連結された横オーガとを備えた穀粒排出構造であって、構造簡略化及び低コスト化を図りつつ、前記横オーガの前記縦オーガに対する上下回動動作の安定化を図り得る穀粒排出構造を提供する。
【解決手段】回動中心Oと同軸上に配置され且つ放出口106及び受入口109を介して縦オーガ筒104及び横オーガ筒107の双方に跨るように設けられた伝動軸102であって一端部が縦搬送軸105に作動連結され且つ他端部が横オーガ筒107における縦オーガ筒104とは反対側から外方へ延在された伝動軸102と、伝動軸102の他端部を横オーガ筒107の基端側から外方へ延在された横搬送軸108の基端部に作動連結するように横オーガ筒107に設けられた伝動ユニット103とを備えた。
(もっと読む)
コンバインの排気構造
【課題】走行機体の前部に設けられた刈取部と、刈取部の後方に設けられた運転部と、運転部の後方に左右方向に並設された脱穀装置および穀粒を回収する回収部と、脱穀装置の後方に設けられた排ワラ処理部と、運転部の下方に設けられたエンジンからの排気を排出する排気管とを備えたコンバインの排気構造を、排気ガスが運転部のオペレータに向けて移動し難く、且つ、排気管の全体に亘ってワラ屑や泥が堆積し難くする。
【解決手段】排気管XPがエンジン60の排気部67Aから脱穀装置4と回収部5との間を斜め上向きに通され、排気管XPの排気出口70Cが排ワラ処理部8(54)の上方に配置された排気構造とした。
(もっと読む)
コンバインにおける穀粒排出用オーガの操作装置
【課題】穀粒排出用オーガの移動を指令する操作が行い易いものとなるコンバインにおける穀粒排出用オーガの操作装置を提供する。
【解決手段】穀粒排出用オーガの移動操作を指令する指令操作部Sが、格納用旋回位置と穀粒排出用旋回位置とにわたって穀粒排出用オーガを自動的に旋回させる自動旋回を指令する自動スイッチ55と、穀粒排出用旋回位置を変更設定するための位置変更指令を指令する旋回位置切換スイッチ56と、穀粒排出用オーガの上昇、下降、右旋回、及び、左旋回を指令する旋回昇降指令手段Dとを備え、サイドパネル67の後部にサイドパネル67のパネル面67Aよりも高い水平な上部面68Aを備えた後部側パネル部68が設けられ、自動スイッチ55、旋回位置切換スイッチ56、旋回昇降指令手段Dの夫々が、後部側パネル部68の上部面68Aに装備されている。
(もっと読む)
コンバイン
【課題】シャッタの位置を検出する検出センサが故障した場合においても、排出オーガの排出詰まりを抑制可能なコンバインを提供すること。
【解決手段】穀粒タンク4に貯留された穀粒を排出する排出オーガ5と、排出オーガ5の排出口13aを開閉するシャッタ14と、シャッタ14を駆動するモータ18と、シャッタ14の開閉位置を検出する位置検出手段23と、を備えるコンバイン1において、位置検出手段23の故障を検出した場合、モータ18を駆動してシャッタ14を全開にする制御を行う制御部10を備える。
(もっと読む)
コンバイン
【課題】複数の遠隔操作装置が操作された場合であっても、排出オーガの誤作動を防止するとともに、この排出オーガの穀粒排出作業の作業性を向上させることができるコンバインを提供する。
【解決手段】コンバイン1は、前記制御手段60は、前記複数の遠隔操作装置(第一及び第二遠隔操作装置80・180)に優先順位を設定し、前記複数の遠隔操作装置(第一及び第二遠隔操作装置80・180)のうち少なくとも2つ以上の遠隔操作装置(第一及び第二遠隔操作装置80・180)から同時に操作信号を受信した場合、その2つ以上の遠隔操作装置(第一及び第二遠隔操作装置80・180)のうち最も優先順位が高い遠隔操作装置(第一遠隔操作装置80)から受信した操作信号に対応して前記作動用アクチュエータ(各アクチュエータ35・37・41)を駆動制御して、前記排出オーガ32を作動させる。
(もっと読む)
コンバイン
【課題】排出オーガが干渉することなく、排気ガスを機体から離れた方向へ効率よく排出可能な排気装置のテールパイプを備えたコンバインを提供する。
【解決手段】刈取、脱穀、選別後の籾を貯留するグレンタンク17と、該グレンタンク11内の籾を排出する縦送りオーガ22と横送りオーガ23を備えた排出オーガ21と、エンジン34の排気ガスを排気音を低減させて排出する排気装置41と、を備えたコンバインにおいて、前記排気装置41のテールパイプ61を、機体の前後方向略中央部で、前記排出オーガ21の横送りオーガ23の下方に配置するとともに、機体後方に延出した。
(もっと読む)
コンバイン
【課題】排出時の穀粒の損傷率を低減可能なコンバインを提供する。
【解決手段】作業切替ダイヤルが稲位置の際に排出スイッチがオンされると(タイミングP)、マイコンは、排出クラッチを接続すると共に、エンジンの回転速度を定格回転速度として、穀粒の排出を開始する(タイミングP〜R)。一方、種子用の穀粒を排出する場合には、作業切替ダイヤルは、種子位置に設定されており(タイミングS)、この状態で排出スイッチがオンされると、マイコンは、エンジン回転速度を、定格回転速度よりも低い種子回転速度に設定し、このエンジン回転速度にて排出オーガを駆動する(タイミングU〜W)。
(もっと読む)
1 - 20 / 110
[ Back to top ]