
Fターム[2B396LR12]の内容
脱穀機要素−籾処理 (10,947) | 穀粒タンクからの機外搬送装置 (879) | 搬送方向 (282) | 縦排出(上下方向) (221)
Fターム[2B396LR12]の下位に属するFターム
横排出筒が接続 (151)
傾斜排出(斜め方向) (28)
Fターム[2B396LR12]に分類される特許
1 - 20 / 42
コンバイン
【課題】機体側方からもオーガクラッチレバーを操作でき、作業効率を向上させることができるコンバインを提供する。
【解決手段】コンバイン1は、グレンタンク8に接続された排出用縦オーガ30を、機体外側に向かって傾倒させた状態で穀粒の排出を行うコンバイン1であって、回動基部39cが共通であり、着座操作部39aが回動基部39cから操縦部9に、側面操作部39bが回動基部39cから機体側方に、それぞれ延設されるオーガクラッチレバー39を設けた。
(もっと読む)
コンバイン

【課題】アンローダを、格納姿勢から排出姿勢に切り換える途中の揺動姿勢を安定して保持すること。
【解決手段】アンローダRの下部に連結部材84の一端が連結され、連結部材84の他端に作動機構Pが連結されており、作動機構Pの動作が、連結部材84を介してアンローダRの下部に伝えられることによって、アンローダRが横軸心X回りに揺動回転する。
(もっと読む)
コンバイン
【課題】排出スクリューにおいて穀粒の詰まりが生じた場合でも、グレンタンク内の底スクリューに故障等が生じ難いコンバインを提供すること。
【解決手段】自走機体にグレンタンクが備えられ、グレンタンクの底に配設された底スクリュー6の一端に、ベベルギア106,107を介して排出スクリュー30が接続され、エンジンからの駆動力を底スクリュー6及び排出スクリュー30に伝えて回転駆動させることによってグレンタンク内の穀粒を排出するコンバインにおいて、エンジンの駆動力が入力される入力部54が、底スクリュー6と連動回転自在な状態でベベルギア106,107のベベルギアケース100を貫通して外側に延出している。
(もっと読む)
コンバイン
【課題】機体幅の拡大によ装置の大型化。
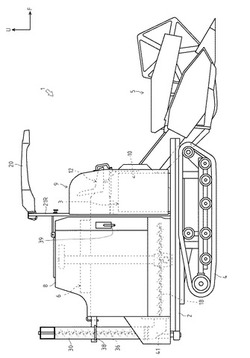
【解決手段】機体フレーム1の前方に刈取装置5を設け、前記機体フレーム1の上方の脱穀装置3の側方に貯留タンク11を設け、該貯留タンク11内には貯留タンク11内の穀粒を排出する排出搬送装置13を設け、該排出搬送装置13の終端には排出用揚穀装置15の下部を接続し、該排出用揚穀装置15の上部に排出オーガ16の基部を接続し、前記貯留タンク11の外側板18には豆類を排出する側面排出口21を設け、前記貯留タンク11内の該貯留タンク11の内側板17と外側板18との間に、前記側面排出口21側が低く傾斜する案内板20を設け、前記側面排出口21には前記貯留タンク11の後方に設けた昇降機25に豆類を誘導する誘導樋31を設け、前記昇降機25の一部または全部を前記貯留タンク11の外側面よりも内側に配置したことを特徴とするコンバイン。
(もっと読む)
コンバイン
【課題】アンローダを、格納姿勢から排出姿勢に切り換える途中の揺動姿勢に安定して保持すること。
【解決手段】アンローダFの揺動姿勢を維持する姿勢維持機構Jが、グレンタンクE側又はアンローダF側のいずれか一方に揺動自在に支持される連結ロッド80と、グレンタンクE側又はアンローダF側の他方に設けられる係合部材74とを備えて構成されており、アンローダFを揺動軸芯X周りに揺動させて格納姿勢から排出姿勢に切り換える途中の揺動姿勢において連結ロッド80の端部が係合する自動係合部75を係合部材74に設け、アンローダFの揺動姿勢を維持する。
(もっと読む)
コンバイン
【課題】格納姿勢にあるアンローダを排出姿勢に切換える際に、アンローダを無理なく排出姿勢に切換えることができるように構成すること。
【解決手段】自走機体にグレンタンクEが備えられ、このグレンタンクEの穀粒を排出スクリューにより排出するアンローダFが備えられ、アンローダFが、排出側端部を自走機体上方側に向かわせる格納姿勢と、排出側端部を自走機体外方側に向かわせる排出姿勢とに切換自在となるように揺動軸芯周りで揺動自在に備えられているコンバインであって、格納姿勢におけるアンローダFを、鉛直方向よりも自走機体内方側に傾斜する傾斜姿勢で保持する受け部材27と、傾斜姿勢にあるアンローダFを固定する姿勢ロック機構Kとを備える。
(もっと読む)
コンバインの穀粒排出装置
【課題】オーガ縦筒の強度低下を回避しつつ清掃口を大きくし、オーガ縦筒内の清掃や点検を行う際の作業性を向上させる。
【解決手段】穀粒タンク4の後方に立設されるオーガ縦筒9と、オーガ縦筒9の上端部から水平方向又は斜め上方向に延出するオーガ横筒10と、オーガ横筒10の全体とオーガ縦筒9の一部又は全体を、オーガ縦筒9を中心として旋回動作させるオーガ旋回機構11とを備えるコンバイン1において、オーガ縦筒9の外周の一部に清掃口9aを形成し、該清掃口9aを覆う着脱カバー20を設けるにあたり、オーガ縦筒9の外周における清掃口形成位置の左右両側部に、補強部材24を設けると共に、該補強部材24の上下長を清掃口9aの上下長よりも長くする。
(もっと読む)
コンバインの穀粒排出装置
【課題】泥土排出孔から排出された排出物が機体内側に堆積するという問題を解消する。
【解決手段】穀粒タンク4の後方に立設されるオーガ縦筒9と、オーガ縦筒9の上端部から水平方向又は斜め上方向に延出するオーガ横筒10と、オーガ横筒10の全体とオーガ縦筒9の一部又は全体を、オーガ縦筒9を中心として旋回動作させるオーガ旋回機構11とを備え、オーガ横筒10を、機体上方に重なる収納位置と、機体外方に延出する排出位置とに旋回変位自在としたコンバイン1において、オーガ縦筒9の外周の一部に、穀粒に付着又は混入した泥土や屑を排出する泥土排出孔20aを設けるにあたり、該泥土排出孔20aを、オーガ横筒10が収納位置にあるときは機体内側を向き、オーガ横筒10が所定の排出位置又は排出範囲にあるときは機体外側を向くように配置する。
(もっと読む)
コンバイン
【課題】グレンタンクに多量穀粒が貯留された状態でエンジンによる穀粒排出をモータによる穀粒排出に切り替えると、駆動力が不足し円滑な排出作業を困難になる。
【解決手段】グレンタンク4内の穀粒を排出するタンク排出装置11を設ける。タンク排出装置11の回転を排出用縦揚穀装置13と横排出オーガ15に伝達する。タンク排出装置11は、エンジン6および該エンジン6とは別に設けたモータ20により駆動可能な構成とする。グレンタンク4内に所定の穀粒がある状態ではエンジン6により駆動する。所定の穀粒がない状態ではモータ20により駆動する。モータ20によってタンク排出装置11を駆動している状態では、エンジン6の回転をアイドリング回転まで自動的に低下させる制御手段86を備えたことを特徴とするコンバイン。
(もっと読む)
コンバイン
【課題】コンバインにおける穀類排出オーガの無線操作装置において、受信アンテナと制御装置との配線が捩じられることを考慮する必要が無く、受信アンテナが排出オーガの旋回動作に邪魔にならず、機体側の受信アンテナと作業者が持っている無線オーガ操作器との無線通信が良好に行えるようにする。
【解決手段】機体後部に立設した揚穀筒(24)の上端に支持した排出オーガ(5)を無線オーガ操作器(11)で旋回及び昇降の動作指示を可能にしたコンバインにおいて、前記無線オーガ操作器(11)からの指令電波を受信するアンテナ(23)と該指令電波に基づいて制御信号を出力するオーガ制御ボックス(26)を揚穀筒(24)の後で機体後側部に取り付けた。
(もっと読む)
コンバイン
【課題】カバー部材の取り付けや取り外しを行うことなくメンテナンス作業を行うことができるコンバインを提供する。
【解決手段】茎稈細断装置8が通常姿勢であるときに、第1カバー部材145の先端部と第2カバー部材153の先端部とが近接して、縦送りスクリューコンベヤ135を囲む囲繞空間A2を形成するとともに、茎稈細断装置8がメンテナンス姿勢であるときに、脱穀装置6と茎稈細断装置8との間から縦送りスクリューコンベヤ135に連通する連通空間を形成する。
(もっと読む)
コンバイン
【課題】複数の遠隔操作装置が操作された場合であっても、排出オーガの誤作動を防止するとともに、この排出オーガの穀粒排出作業の作業性を向上させることができるコンバインを提供する。
【解決手段】コンバイン1は、前記制御手段60は、前記複数の遠隔操作装置(第一及び第二遠隔操作装置80・180)に優先順位を設定し、前記複数の遠隔操作装置(第一及び第二遠隔操作装置80・180)のうち少なくとも2つ以上の遠隔操作装置(第一及び第二遠隔操作装置80・180)から同時に操作信号を受信した場合、その2つ以上の遠隔操作装置(第一及び第二遠隔操作装置80・180)のうち最も優先順位が高い遠隔操作装置(第一遠隔操作装置80)から受信した操作信号に対応して前記作動用アクチュエータ(各アクチュエータ35・37・41)を駆動制御して、前記排出オーガ32を作動させる。
(もっと読む)
コンバイン
【課題】遠隔操作装置の操作時間を短縮して、この遠隔操作装置を用いた排出オーガによる穀粒排出作業の作業性を向上させることができるコンバインを提供する。
【解決手段】コンバイン1は、グレンタンク17内の穀粒を外部に排出する昇降かつ旋回可能な排出オーガ32と、排出オーガ32を昇降させる昇降用アクチュエータ37と、排出オーガ32を旋回させる旋回用アクチュエータ35と、各アクチュエータ35・37を駆動制御する制御手段60と、無線通信を用いて前記制御手段60を遠隔操作する排出オーガ32の昇降用操作手段と旋回用操作手段とを有する遠隔操作装置80と、を備えるコンバインであって、制御手段60は、各操作手段が同時に操作されると、その操作に対応するように各アクチュエータ35・37を同時に駆動制御して、排出オーガ32を昇降させながら旋回させる。
(もっと読む)
コンバイン
【課題】排出オーガを遠隔操作する遠隔操作装置の操作性を向上させることができるコンバインを提供する。
【解決手段】コンバイン1において、制御手段60は、操作手段の操作の開始から予め設定された設定時間T2経過するまでの間は、排出オーガ32の昇降速度及び旋回速度が第一の設定速度になるように、各アクチュエータ35・37を制御し、設定時間T2経過以降は、排出オーガ32の昇降速度及び旋回速度が第一の設定速度よりも速い第二の設定速度になるように、各アクチュエータ35・37を制御する。
(もっと読む)
穀粒排出装置
【課題】揚穀筒4から固定搬送筒6側への穀粒の引き継ぎ搬送をスムーズに行うことができる穀粒排出装置を提供すること。
【解決手段】グレンタンク3内の底部に配置される穀粒搬送用の第5螺旋10bに連動して作動する縦方向に伸びた穀粒搬送用の第1螺旋4bを有する揚穀筒4と、該揚穀筒4内の第1螺旋4bに連動して横方向に穀粒を搬送する穀粒搬送用の第2螺旋5bを有する横搬送筒5を含む排穀オーガGを備え、揚穀筒4内の第1螺旋4bの終端部を二重螺旋とすると、揚穀筒4から横搬送筒5へ送られる穀粒が螺旋の引継ぎ部で詰まることがなく、横搬送筒5での穀粒の搬送効率が従来より向上する。
(もっと読む)
コンバイン
【課題】コンバイン作業における燃料消費量の節減、エンジンによる騒音の低減、排気ガスの減少による雰囲気の清浄化によって、住環境の保全に寄与すると共に、穀粒排出作業の能率を高め、収穫作業全体の能率を向上させる。
【解決手段】エンジン(68)の駆動力で発電を行なう発電機(101)と、該発電機(101)から供給される電力で刈取装置(8)を上昇駆動すると共に該上昇後の刈取装置(8)の有する位置エネルギーで発電を行なう発電機モータ(207)と、該発電機モータ(207)で発電された電力を蓄電するキャパシタ(109)と、該キャパシタ(109)から供給される電力によって穀粒排出装置(5a)を駆動する電動モータ(83)と、該電動モータ(83)の駆動力で穀粒排出装置(5a)を駆動する状態とエンジン(68)の駆動力で穀粒排出装置(5a)を駆動する状態とに切り換える伝動切換装置(69)を設ける。
(もっと読む)
コンバイン
【課題】アクチュエータを介して穀粒排出オーガを起伏または旋回作動させるオーガ操作具を穀粒排出オーガの先端部に設けたコンバインにおいて、無理なく良好な操作フィーリングで穀粒排出オーガの起伏または旋回作動が行なえるオーガ操作具を提供する.
【解決手段】オーガ操作具31を、上下左右の操作面31a,31b,31c,31dと、該操作面31a,31b,31c,31dの押動操作に対応する連動スイッチ32a,32b,32c,32dと、該連動スイッチ32a,32b,32c,32dを切り状態に復帰付勢する弾機35を有して上下左右方向に押動操作自在な多方向操作スイッチで構成し、該多方向操作スイッチの上下左右何れかの方向への押動操作に対応する連動スイッチが入り状態となった時、前記多方向操作スイッチの押動操作方向と同方向に穀粒排出オーガ13の起伏または旋回作動がなされるようにした。
(もっと読む)
コンバインの穀粒回収装置
【課題】脱穀装置からの脱穀粒を穀粒袋に回収するコンバインの穀粒回収装置において、穀粒タンクの容量を大にしても貯留穀粒の重量による走行機体の重心アップを抑制しながら、穀粒袋を高い配置高さに位置させた状態で袋詰めを行なえるようにする。
【解決手段】脱穀装置からの脱穀粒を貯留する穀粒タンク51と、穀粒タンク51の底部に設けた穀粒排出口57とを備えてある。穀粒タンク51の脱穀粒を穀粒排出口57から取り出して揚送して穀粒排出口57よりも高い配置高さに位置する袋詰め吐出口59から吐出する揚穀装置53と、穀粒袋Fを袋口が袋詰め吐出口59に装着された状態で支持する袋支持装置54とを備えてある。
(もっと読む)
コンバイン
【課題】排出オーガを安全に操作できるコンバインを提供することを目的とする。
【解決手段】選別後の穀粒を貯留するグレンタンク8と、グレンタンク8に貯溜された穀粒を排出可能とし、昇降・旋回可能な排出オーガ18と、排出オーガ18を操作手段から送信される信号に基づいて、排出・昇降・旋回可能に制御する制御部39とを備えるコンバインであって、前記操作手段として、制御部39に有線で信号を送信するオーガ操作リモコン37および本機側操作部42と、制御部39に無線で信号を送信する携帯電話機38とを備え、制御部39は、オーガ操作リモコン37および本機側操作部42および携帯電話機38の内、一の操作手段の信号に基づいて、排出オーガ18が排出または昇降または旋回の動作中に、他の操作手段の信号を検知すると、排出オーガ18の前記動作を停止させるものである。
(もっと読む)
コンバイン
【課題】 脱穀装置の横側に配置した穀粒回収タンクの前側に運転部を設け、穀粒回収タンクに貯留された穀粒を穀粒搬出装置で搬送して機外に排出するよう構成し、穀粒搬出装置を、穀粒回収タンクの底部から送出された穀粒を揚送する縦搬送機構と、揚送された穀粒を横送りして先端排出口から排出する横搬送機構とで構成し、横搬送機構を、その基部の縦向き支点周りに駆動旋回可能、かつ、基部の横向き支点周りに駆動上下揺動可能に構成したコンバインにおいて、穀粒排出位置を変更する手動操作部を固定配備して安価に実施することができるものでありながら、手動操作部の操作性を高める。
【解決手段】 横搬送機構13Bを旋回作動させる旋回駆動機構と横搬送機構13Bを上下揺動作動させる揺動駆動機構45とを操作する手動操作部83を、運転部6における機体横外側近くに配置してある。
(もっと読む)
1 - 20 / 42
[ Back to top ]