
Fターム[2B396QA12]の内容
脱穀機要素−籾処理 (10,947) | 検出の目的又は検出量 (294) | 検出内容又は検出量 (190) | 長さ、距離又は間隔 (29)
Fターム[2B396QA12]の下位に属するFターム
深さ又は高さ(上下方向) (21)
Fターム[2B396QA12]に分類される特許
1 - 8 / 8
コンバイン
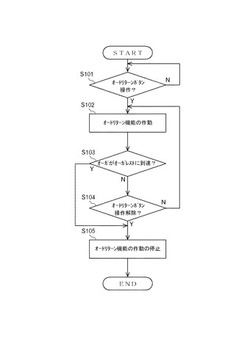
【課題】簡易な構成により排出オーガの利便性及び操作性を向上させることができるコンバインを提供する。
【解決手段】制御手段60は、遠隔操作装置80における各種ボタンのうちオートリターンボタン83への押し操作に応じて送信された操作信号を継続して受信している場合には、排出オーガ32をオーガレスト21に載置させるように自動的に昇降又は旋回させる一方、その継続していた当該操作信号の受信が途絶えた場合には、当該排出オーガ32の自動的な昇降又は旋回を停止させる。
(もっと読む)
伸縮式穀粒排出オーガ

【課題】伸縮式穀粒排出オーガによる穀粒排出作業を中断してこのオーガを短縮させる際に、オーガ内に残留した穀粒の圧縮を防止して該オーガの螺旋の破損を防止する。
【解決手段】伸縮式穀粒排出オーガにおいて、伸縮搬送螺旋(1)の基部側を、固定搬送螺旋(3)の先端側にワンウェイクラッチ(8)を介して伝動可能に連結し、伸縮搬送螺旋(1)は、排出クラッチ(9)の入り操作によって固定搬送螺旋(3)を介して伝動され、切り操作に伴って、伸縮用搬送筒(2)の制御モータ(10)から伝動される構成とし、伸縮搬送螺旋(1)は、伸縮用搬送筒(2)内の残留穀粒がほとんど無くなるまで伝動される構成とする。
(もっと読む)
コンバインの伸縮式穀粒排出オーガ
【課題】先端側搬送筒の基端側搬送筒に対する伸縮移動によって搬送スクリュの搬送下流側スクリュ部と搬送上流側スクリュ部とが相対回転しながら伸縮移動するコンバインの伸縮式穀粒排出オーガにおいて、残留穀粒による障害を受けないで、しかも残留穀粒の損失を発生させないで短縮させ得るようにする。
【解決手段】搬送下流側スクリュ部40を穀粒搬出方向に回転しながら短縮移動させる。先端側搬送筒21の穀粒出口21aからの穀粒を貯留する貯留室98を形成した貯留姿勢と、先端側搬送筒21の穀粒出口21aからの穀粒を排出する排出路97を形成した排出姿勢とに切り換え自在な可動部材15を備えてある。搬送下流側スクリュ部40の短縮移動状態において可動部材15を貯留姿勢に自動的に切り換え操作する。
(もっと読む)
コンバイン
【課題】中折れ式の排出オーガを伸長位置又は屈折位置の何れかに電動で切り換え得るコンバインにおいて、排出オーガの伸長/屈折動作時において周囲との干渉を防止することができるコンバインを提供する。
【解決手段】横オーガ7bは、先端部側の第2横オーガ7b2が基端部側の第1横オーガ7b1の側方に配置された回動軸330回りに回動することで、前記第2横オーガ7b2が前記第1横オーガ7b1に対して並列配置となる屈折位置Q1及び前記第2横オーガ7b2が前記第1横オーガ7b1と同軸配置となる伸長位置Q2の間を移動する。屈伸駆動機構X3は、前記第2横オーガ7b2を前記屈折位置Q1及び前記伸長位置Q2の間で移動させる。前記横オーガ7bが収納位置P2に位置した状態でのみ前記第2横オーガ7b2を前記屈折位置Q1及び前記伸長位置Q2の間で移動させるように前記屈伸駆動機構X3を制御する。
(もっと読む)
作業機の無線式操作装置
【課題】無線式指令手段の誤操作による被操作部の誤操作を防止できるものでありながら、被操作部を操作する場合の操作性の向上を図ることができる作業機の無線式操作装置を提供すること。
【解決手段】被操作部の作動についての複数種の操作指令を機体側制御手段に無線信号にて指令する手動操作式の無線式指令手段42が設けられ、無線式指令手段が、操作指令を指令する指令操作手段43〜50と、無線信号を出力する稼動状態と出力しない休止状態とに切換自在な出力制御手段53と、出力制御手段を稼動状態と休止状態とに切り換える動作状態切換手段56とを備え、動作状態切換手段が、出力制御手段が休止状態である場合に指令操作手段にて特定操作指令が指令されると、出力制御手段を稼動状態に切り換えるように構成されている作業機の無線式操作装置。
(もっと読む)
コンバイン
【課題】穀粒排出オーガの自動旋回に係る旋回指令手段をシンプルで操作が容易なものとし、かつ、穀粒排出オーガの自動旋回に係る誤操作を防止するコンバインを提供する。
【解決手段】穀粒排出オーガが停止する作業位置は、旋回セット操作スイッチ153を一回押す毎に、収納位置からの旋回量が最も小さい作業位置から順に大きい作業位置へ変更され、旋回セット操作スイッチ153を作業位置の数よりも一回多く押すと穀粒排出オーガ15の旋回が停止し、さらに旋回セット操作スイッチ153を一回押すと再び穀粒排出オーガ15が停止する作業位置が収納位置からの旋回量が最も小さい作業位置に変更される。
(もっと読む)
コンバイン
【課題】縦筒、横筒、伸縮筒及び排出筒からなる排出オーガ付きのコンバインにおいて、ユニバーサルデザインの観点から排出オーガに対する操作手段の操作性を向上させる。
【解決手段】無線式リモートコントロール装置101はL字状又は湾曲状の操作レバー103を備える。操作レバー103における横レバー部105の先端部には、その軸心r方向に沿ってのスライド操作と軸心r回りの首振り回動操作との2種類の操作が可能なグリップ部106を設ける。このように、リモートコントロール装置101における1本の操作レバー103に対して、排出オーガ8に対する水平旋回操作機能、起伏揺動操作機能、伸縮操作機能及び首振り回動操作機能という4種類の操作機能を集約することにより、排出オーガ8に対する4種類の操作を片手で実行できる。
(もっと読む)
粉粒体搬送装置
【課題】粉粒体を移送排出する移送排出筒装置の伸縮自在の移動用移送筒の先端部へ左右両側へ回動自在な排穀口を有する排出筒を設け、排穀口から排出先端部までの距離を検出する距離検出装置を設けて、排出筒の回動移動を制御しようとするものである。
【解決手段】粉粒体を移送排出する移送排出筒装置6の移動用移送筒13の移送終端部へ排穀口14aを有して左右両側へ回動自在な排出筒14を設け、該排出筒14の左右両側へ排穀口14aから排出先端部までの距離を検出する距離検出装置6aを設けた構成である。
(もっと読む)
1 - 8 / 8
[ Back to top ]