
Fターム[2B396QG06]の内容
Fターム[2B396QG06]に分類される特許
1 - 16 / 16
コンバイン
【課題】撮像手段により穀粒吐出口から排出された穀粒の貯留状態を確認するための画像情報を得ることができるものでありながら、撮像手段が損傷を受けるおそれを少なくすることが可能なコンバインを提供する。
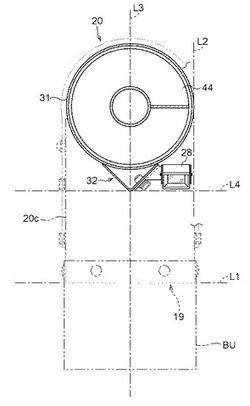
【解決手段】穀粒タンクの穀粒を揚送する縦送りコンベアの上端部に、穀粒を横送りして穀粒吐出口19から穀粒を機外に排出する横送りコンベア20が、起伏揺動可能に且つ縦送りコンベアの縦向き軸芯を中心にして格納位置と穀粒排出位置とにわたり旋回可能に設けられ、穀粒吐出口19の下方側箇所を撮像する撮像手段28が、横送りコンベア20における円筒状の外筒部31の下側箇所に、外筒部31の軸芯方向視で、穀粒吐出口19の下端位置L1よりも上方に位置するとともに外筒部31の横幅方向外端位置L2よりも横幅方向内方側に位置する状態で備えられる。
(もっと読む)
コンバイン

【課題】排出時の穀粒の損傷率を低減可能なコンバインを提供する。
【解決手段】作業切替ダイヤルが稲位置の際に排出スイッチがオンされると(タイミングP)、マイコンは、排出クラッチを接続すると共に、エンジンの回転速度を定格回転速度として、穀粒の排出を開始する(タイミングP〜R)。一方、種子用の穀粒を排出する場合には、作業切替ダイヤルは、種子位置に設定されており(タイミングS)、この状態で排出スイッチがオンされると、マイコンは、エンジン回転速度を、定格回転速度よりも低い種子回転速度に設定し、このエンジン回転速度にて排出オーガを駆動する(タイミングU〜W)。
(もっと読む)
コンバイン
【課題】重量検出手段を新たなものと交換した際に、自動的に重量検出手段固有の情報を書き換えることができ、設定作業を容易にすることができるコンバインを提供する。
【解決手段】選別後の穀粒を貯留するグレンタンク17と、グレンタンク17の重量を検出する重量センサ32と、重量センサ32からの信号を入力して、グレンタンク17内の穀粒の排出前と排出後の重量差に基づいて穀粒の収穫量を演算する演算部55を有する制御装置52と、収穫量の演算を許可する収穫情報スイッチ80と、を備えるコンバイン1において、制御装置52は、収穫情報スイッチ80が操作されたとき、重量センサ32の固有情報を取得し、この取得した今回の固有情報が以前に取得して記憶した前回の固有情報と異なる場合は、記憶する重量センサ32の固有情報を前回の固有情報から今回の固有情報に書き換える。
(もっと読む)
コンバイン
【課題】大豆等の収穫物としての穀粒を一定量搬出可能としたコンバインを提供すること。
【解決手段】
貯留タンク18の底部に配設した搬送コンベア70の直上方に開閉体80を配設すると共に、同開閉体80は搬送コンベアへの穀粒の流入口Dを開閉自在として、搬送コンベア70から搬出オーガへ繰り出す穀粒の搬送を適宜停止可能としたコンバインである。このように、搬送コンベア70から搬出オーガ10へ繰り出す穀粒の搬送を適宜停止可能としているため、オペレータは収容袋への穀粒の収容具合を見ながら搬送コンベア70による搬送作業を行い、収容袋に穀粒が満杯になる前に搬送コンベア70による搬送作動を停止させることで、搬出オーガ10内の穀粒を収容袋内に搬出することができる。そのため、搬出オーガ10内に穀粒が残留することがない。
(もっと読む)
コンバイン
【課題】燃料消費量の節減、エンジンによる騒音の低減、排気ガスの減少による雰囲気の清浄化によって、住環境の保全に寄与すると共に、穀粒排出作業の能率を高め、収穫作業全体の能率を向上させる。
【解決手段】排出クラッチ(95)を介して入力されるエンジン(68)の駆動力と排出クラッチ(95)を介することなく入力される電動モータ(83)の駆動力とのうち、他方よりも高速回転となった側の駆動力を穀粒排出装置(5a)側へ出力する伝動切換装置(69)を設け、電動モータ(83)の駆動力による穀粒排出装置(5a)の駆動を起動操作した場合に、エンジン(68)を自動的に停止させる制御装置(111)を設ける。また、電動モータ(83)の駆動力による穀粒排出装置(5a)の駆動を停止操作した場合に、エンジン(68)を自動的に始動させる制御装置(111)を設ける。
(もっと読む)
コンバイン
【課題】穀粒排出オーガの昇降や旋回動作、及び穀粒排出クラッチを作動させるアクチュエータを動作制御するオーガ排出制御手段と、該オーガ排出制御手段に接続する受信アンテナに無線信号を送信する携帯式無線操作器を備えたコンバインにおいて、前記携帯式無線操作器をコンバインのオペレータや周辺作業者が機体の近くで携行している時のみエンジンを始動させることができるように、既存の携帯式無線操作器を利用した所謂キーレスエントリーシステムを安価に構成する.
【解決手段】オーガ排出制御手段31に接続した送受信アンテナ32,32´に無線信号を送信する携帯式無線操作器33が、前記送受信アンテナ32,32´との交信不能域Y,Y´にある時、エンジンEの始動を牽制し得るエンジン始動制御部31dを設けた。
(もっと読む)
コンバイン
【課題】燃料消費量の節減、エンジン停止による騒音の低減、排気ガスの減少による雰囲気の清浄化によって、住環境の保全に寄与すると共に、穀粒排出作業の中断をなくして収穫作業全体の能率を高める。
【解決手段】蓄電池(109)の電圧を検出する電圧検出手段を設け、該電圧検出手段によって設定電圧よりも高い電圧が検出されている状態で駆動源自動切換式排出スイッチ(114)が入り操作された場合に、排出クラッチ(95)を遮断状態に維持したまま電動モータ(83)を駆動して穀粒排出装置(5a)を駆動させ、電圧検出手段によって設定電圧よりも低い電圧が検出されている状態で駆動源自動切換式排出スイッチ(114)が入り操作された場合には、電動モータ(83)を停止させたまま排出クラッチ(95)を自動的に接続してエンジン(68)の駆動力で穀粒排出装置(5a)を駆動する制御装置(111)を設ける。
(もっと読む)
コンバイン
【課題】燃料消費量の節減、エンジン停止による騒音の低減、排気ガスの減少による雰囲気の清浄化によって、住環境の保全に寄与すると共に、穀粒排出作業の中断をなくして収穫作業全体の能率を高める。
【解決手段】排出クラッチ(95)を介して入力されるエンジン(68)の駆動力と排出クラッチ(95)を介することなく入力される電動モータ(83)の駆動力とのうち、他方よりも高速回転となった側の駆動力を穀粒排出装置(5a)側へ出力する伝動切換装置(69)を設け、蓄電池(109)の電圧を検出する電圧検出手段を設け、電動モータ(83)の駆動力によって穀粒排出装置(5a)を駆動している状態で、電圧検出手段によって設定電圧よりも低い電圧が検出された場合に、排出クラッチ(95)を自動的に接続してエンジン(68)の駆動力で穀粒排出装置(5a)を駆動する制御装置(111)を設ける。
(もっと読む)
コンバイン
【課題】アクチュエータを介して穀粒排出オーガを旋回作動させるオーガ旋回操作具の操作方向と、穀粒排出オーガの旋回方向とを一致させることによって、オペレータによる直感的な該穀粒排出オーガの旋回操作を可能にする。
【解決手段】オーガ制御手段31により、ダイヤル式オーガ旋回操作具22の回動操作方向と、穀粒排出オーガ13の旋回作動方向とが一致するように穀粒排出オーガ13を旋回作動させるアクチュエータ17の動作を制御すると共に、当該ダイヤル式オーガ旋回操作具22の回動操作量に応じて穀粒排出オーガ13の旋回速度を変更すべく前記アクチュエータ17の動作を制御するように構成にした。
(もっと読む)
コンバイン
【課題】中折れ式の排出オーガを伸長位置又は屈折位置の何れかに電動で切り換え得るコンバインにおいて、排出オーガの伸長/屈折動作時において周囲との干渉を防止することができるコンバインを提供する。
【解決手段】横オーガ7bは、先端部側の第2横オーガ7b2が基端部側の第1横オーガ7b1の側方に配置された回動軸330回りに回動することで、前記第2横オーガ7b2が前記第1横オーガ7b1に対して並列配置となる屈折位置Q1及び前記第2横オーガ7b2が前記第1横オーガ7b1と同軸配置となる伸長位置Q2の間を移動する。屈伸駆動機構X3は、前記第2横オーガ7b2を前記屈折位置Q1及び前記伸長位置Q2の間で移動させる。前記横オーガ7bが収納位置P2に位置した状態でのみ前記第2横オーガ7b2を前記屈折位置Q1及び前記伸長位置Q2の間で移動させるように前記屈伸駆動機構X3を制御する。
(もっと読む)
脱穀装置の開閉操作装置及びコンバイン
【課題】 脱穀経路で穀稈詰まりが生じた場合であっても、上部ケースの作業位置での固定解除を容易に行えるようにして、穀稈詰まりの対処を迅速に行えるようにすること。
【解決手段】 上部ケースの作業位置からの開操作を阻止する固定状態と開操作を許容する解除状態とに切り換え可能に構成された固定手段(58)、上部ケースを開閉駆動する開閉駆動手段(51)、上部ケースの開操作及び閉操作を指令する開閉指令手段(48)、固定手段を切り換え駆動する切換駆動手段(68,70)が設けられ、制御手段(50)が、開操作が指令されると、開閉駆動手段(51)を上部ケースの閉操作側に作動させた状態で固定手段(58)を固定状態から解除状態に切り換え、次に、上部ケースを開操作するべく、切換駆動手段(68,70)及び開閉駆動手段(51)の作動を制御するように構成されている脱穀装置の開閉操作装置。
(もっと読む)
コンバインにおける穀粒排出用オーガの操作装置
【課題】 移動目的に適した速度で穀粒排出用オーガを移動させることができる使い勝手のよいコンバインにおける穀粒排出用オーガの操作装置を提供すること。
【解決手段】 制御手段が、端末側指令手段にて指令される指令情報BU,BD,BR,BLに基づいて昇降用アクチュエータ及び旋回用アクチュエータの作動を制御する場合の方が、機体側指令手段にて指令される指令情報CU,CD,CR,CLに基づいて昇降用アクチュエータ及び旋回用アクチュエータの作動を制御する場合よりも低速で穀粒排出用オーガが昇降作動及び旋回作動するように、昇降用アクチュエータ及び旋回用アクチュエータの作動を制御するように構成されているコンバインにおける穀粒排出用オーガの操作装置を構成した。
(もっと読む)
コンバイン
【課題】穀粒排出オーガの自動旋回に係る旋回指令手段をシンプルで操作が容易なものとし、かつ、穀粒排出オーガの自動旋回に係る誤操作を防止するコンバインを提供する。
【解決手段】穀粒排出オーガが停止する作業位置は、旋回セット操作スイッチ153を一回押す毎に、収納位置からの旋回量が最も小さい作業位置から順に大きい作業位置へ変更され、旋回セット操作スイッチ153を作業位置の数よりも一回多く押すと穀粒排出オーガ15の旋回が停止し、さらに旋回セット操作スイッチ153を一回押すと再び穀粒排出オーガ15が停止する作業位置が収納位置からの旋回量が最も小さい作業位置に変更される。
(もっと読む)
コンバインの穀粒排出装置
【課題】穀粒排出装置の縦オーガ後方に空き空間を確保する。
【解決手段】グレンタンク14内の穀粒を排出コンベアから受け継ぎ、機外へ排出する縦オーガ23と横オーガとを備え、該縦オーガ23を機体フレーム上に旋回可能に支持したコンバインの穀粒排出装置20において、前記縦オーガ23下部とグレンタンク14下部とを連結する連結部材24を機体フレームに固設して、該連結部材24に縦オーガ23を旋回可能に支持し、該連結部材24に縦オーガ旋回用の駆動機構30を設け、該駆動機構30を機体側方側に配置した。
(もっと読む)
コンバイン
【課題】 制御操作の安定性や確実性に優れるとともに、機器への負荷を確実に抑制することができる穀物搬出オーガの動作制御機能を備えたコンバインを提供する。
【解決手段】 穀物搬出オーガ17の旋回駆動部49及び駆動停止部76を操作する操作部による穀物搬出オーガ17の旋回操作終了後、一定時間を経過した後に、駆動停止部76のオン・オフ作動を所定の時間間隔で繰り返し行うように制御する。
(もっと読む)
コンバイン
【課題】グレンタンク内の穀物重量を、グレンタンクの一側下部に配置した重量センサにより検出して、センサ出力と真の穀物重量を比例の関係で換算して出力すると、正確な穀物重量が得られなかった。
【解決手段】収穫穀物を貯溜するグレンタンク13と、該グレンタンク13に穀物を投入する手段と、該グレンタンク13内の穀物を外部に排出するための穀物排出装置15と、該グレンタンク13の一側下部にグレンタンク重量を測定する重量センサ32と、該重量センサ32から出力された信号を入力して記憶部55に記憶したマップにより実際の重量に変換して推定穀物重量として出力する制御手段53とを備え、前記マップにはグレンタンクへの投入時と排出時の検量線を有して、この検量線に従って変換して出力するようにした。
(もっと読む)
1 - 16 / 16
[ Back to top ]